

Основні види механізмів. Їх коротка характеристика.
Механізми розділяються на дві великі групи: механізми з нижчими парами, які іноді називають важільними, та механізми з вищими парами.
Ті й інші можуть бути плоскими та просторовими.
І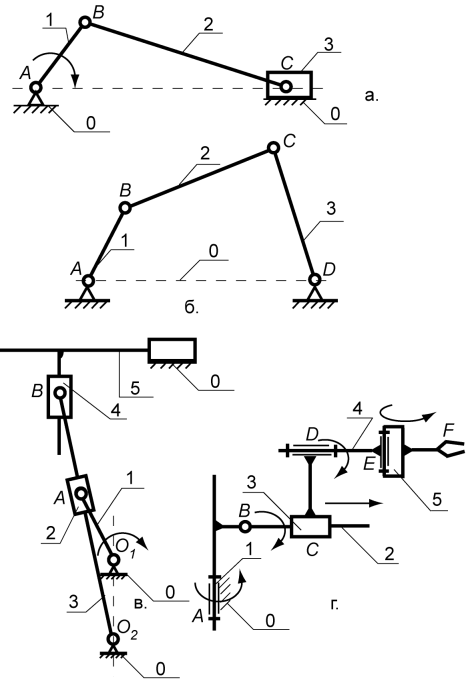 з
механізмів з нижчими парами найбільш
поширеними є шарнірно-важільні
механізми
(ШВМ),
основною перевагою яких є можливість
отримання заданого ходу
механізму
(це відстань між крайніми положеннями
його вихідної ланки), завдяки чому ці
механізми є основними механізмами як
робочих машин, так і машин-двигунів.
з
механізмів з нижчими парами найбільш
поширеними є шарнірно-важільні
механізми
(ШВМ),
основною перевагою яких є можливість
отримання заданого ходу
механізму
(це відстань між крайніми положеннями
його вихідної ланки), завдяки чому ці
механізми є основними механізмами як
робочих машин, так і машин-двигунів.
Розглянемо приклади найбільш поширених ШВМ.
Кривошипно - повзунний механізм
1 – кривошип, 2 – шатун, 3 – повзун, 0 – стояк. Механізм служить для перетворення обертального руху в поступальний Шарнірний чотириланковий механізм
служить для перетворення одного виду обертального руху в інший і може бути в залежності від розмірів ланок кривошипно-коромисловим, двокривошипним і двокоромисловим; застосовується в пресах і кувальних машинах, хитних конвеєрах, прокатних станах, муфтах зчеплення, приладах тощо. У ньому ланки: 1 – кривошип, 2 – шатун, 3 – коромисло, 0 – стояк. Кулісний механізм служить для перетворення одного виду обертального руху в інший або безперервного обертального руху в поступальний. Кулісні механізми застосовують у стругальних і довбальних верстатах, поршневих насосах і компресорах, гідроприводах, приладах тощо. Кулісой зазвичай називають ланку з пазом, по якому переміщується кулісний камінь. Куліса може бути обертовою, хитною або поступально рухомою. 1 – кривошип, 2, 4 – кулісні камені, 3 – хитна куліса, 5 - поступально рухома куліса з різцовою головкою, 0 – стояк.
Просторовий важільний механізм одного з видів промислового робота, це механізм з незамкнутим кінематичним ланцюгом ABCDEF (ланки 1...5 – рухомі, 0 – стояк, F – кліщі). Промислові роботи в наш час знаходять все більш широке застосування для виконання різноманітних технологічних і допоміжних операцій: збирання, зварювання, фарбування, завантаження тощо.
У зубчастих передачах розрізняють зовнішнє, внутрішнє і рейкове зачеплення
У залежності від розташування осей коліс зубчасті передачі можуть бути з паралельними осями (циліндричні), з осями, що перетинаються (конічні) та з осями, що перехрещуються або гіперболічні передачі, варіантами яких є гвинтові, черв'ячні та гіпоїдні передачі
У кулачкових механізмах - плоских і просторових, які широко застосовуються у різних машинах, верстатах, приладах, вища кінематична пара утворена ланками, що називаються кулачок і штовхач. Замикання вищої кінематичної пари може бути силовим (наприклад, під дією власної сили тяжіння, або за допомогою пружини) та геометричним .
У фрикційному механізмі передача обертального руху здійснюється завдяки тертю між ланками, що утворюють вищу кінематичну пару.
Простий фрикційний механізм складається з двох обертових круглих циліндрів і стояка . Силове замикання вищої пари здійснюється пружинами 4.
Фрикційні механізми використовують і в безступінчастих передачах. При сталій кутовій швидкості диска завдяки переміщенню колеса – катка уздовж своєї осі можна плавно змінювати його кутову швидкість і навіть напрям обертання.
Мальтійський механізм перетворює безперервне обертання вхідної ланки – кривошипа в переривчасте ( з зупинками) обертання вихідної ланки – хреста . Механізм має стояк і вищу пару, яка утворена цівкою В кривошипа та пазом хреста.
Храповий механізм із ведучою собачкою та стояком служить для перетворення зворотно-обертального руху коромисла з собачкою у переривчастий обертальний рух ( в одному напрямку) храпового колеса. Собачка з пружиною 6 не дає колесу обертатися у зворотній бік. Вища пара тут утворена собачкою та храповим колесом. Механізм може мати вхідну ланку і зі зворотно-поступальним рухом.
Мальтійські та храпові механізми широко застосовуються у верстатах і приладах.
Під механізмами з гнучкими ланками маються на увазі зазвичай паси, канати, ланцюги, стрічки, які охоплюють дві ланки або більш та встановлюють певний зв'язок між переміщеннями цих ланок.
У залежності від типу гнучкої ланки цей механізм називається пасовою, канатною або ланцюговою передачею.
Гідравлічним називається механізм, в якому перетворення руху здійснюється завдяки твердим і рідинним тілам.