

Лекция 3. Различные классификации систем Классификация по происхождению
По происхождению системы можно разделить на группы: искусственные, естественные, смешанные (рис. 10).
Определение 1. Искусственные системы – системы, созданные человеком.
Определение 2. Естественные системы – системы, возникшие в природе без участия человека.
Определение 3. Смешанные системы – системы, объединяющие искусственные и естественные подсистемы.
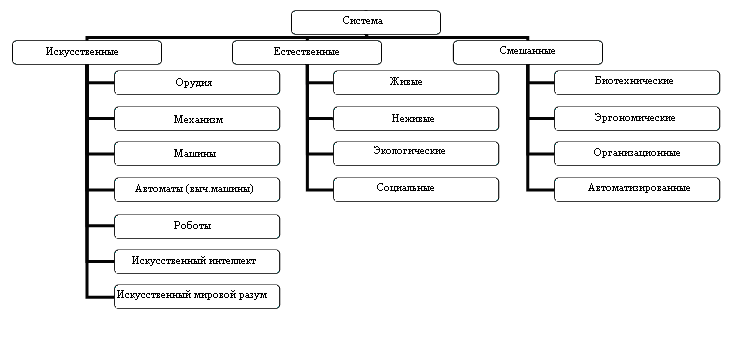
Рис.10
Орудие – техническое приспособление, предназначенное для выполнения определенной работы или действия.
Механизм – внутреннее устройство прибора, приводящее его в действие.
Машины – механическое устройство, совершающее определенную работу с преобразованием энергии, материалов или информации.
Автомат – машина, после включения самостоятельно выполняющая ряд заданных операций.
Робот – автомат, осуществляющий действия, подобные действиям человека.
Искусственный интеллект – автомат, моделирующий отдельные функции творческой (мыслительной) деятельности человека.
Живые системы – системы, в которых присутствуют обмен веществ, обмен информацией, окислительно-восстановительные процессы.
Неживые системы – этими признаками не обладают.
Экологические системы – совокупность живых и неживых систем (моря, реки, горы).
Социальные системы – общности людей, объединенных по территориальному, географическому, политическому, производственному и другим принципам (город, село, государство, цех, завод и т.д.).
Смешанная система – система, имеющая искусственные и естественные подсистемы.
Биотехнические системы – системы, в которых в качестве подсистем
присутствуют люди, механизмы, машины и т.д.
Эргономические системы – объединения трудовых коллективов для выполнения определенной работы.
Организационные системы – совокупность биотехнических систем, организованных в определенную систему.
Автоматизированные системы – организационные системы с элементами автоматического управления, реализованными при помощи вычислительных машин.
Классификация по типам оператора s системы
Если рассмотреть систему как ящик с входами и выходами, то за оператор S принимают некоторое правило или действие, преобразующее входные переменные в выходные (рис. 11).

Рис. 11
Черный ящик означает, что оператор S неизвестен.
Непараметризованный класс означает, что существует информация о свойствах оператора S, например, известно, что S – монотонная функция, дискретная или непрерывная и т.п., но не известен конкретный вид оператора.
Параметризованный
класс
означает, что известна параметрическая
модель системы, т.е. можно записать
зависимость между входом Х
и выходом Y,
и в зависимости присутствует конечное
число параметров
![]() :
:![]() ,
но значения параметров неизвестны.
,
но значения параметров неизвестны.
Белый ящик означает, что известна параметрическая модель системы (т.е. определена функциональная зависимость между входом и выходом) и параметры модели.
Классификация по способам управления системой
Система, управляемая извне – система, подсистема управления которой не находится внутри самой системы (рис. 12).

Рис. 12
Независимо от того, включен ли в систему и вынесен ли из нее управляющий блок, можно выделить четыре основных типа (способа) управления.
1. Управление без
обратной связи
– известен путь достижения системой
своей цели (т.е. фазовая траектория
![]() цели). Если известен путь, то также
известно
цели). Если известен путь, то также
известно
![]() – управление
системой
для достижения цели.
– управление
системой
для достижения цели.
![]() В
этом случае управление осуществляется
без учета развития событий (рис. 13).
Примеры: стрельба по цели, работа
вычислительной машины, рост зародыша,
реализация инвестиционных проектов и
т.д., управление государством в условиях
жесткой диктатуры власти.
В
этом случае управление осуществляется
без учета развития событий (рис. 13).
Примеры: стрельба по цели, работа
вычислительной машины, рост зародыша,
реализация инвестиционных проектов и
т.д., управление государством в условиях
жесткой диктатуры власти.

Рис. 13
2. Регулирование.
В некоторых случаях процессы на
неуправляемых входах (т.е. воздействие
)
отличаются от ранее предполагаемых
либо существенным оказывается действие
неучитываемых факторов, которые изменяют
траекторию движения системы. Пусть
![]() – текущая траектория движения,
– текущая траектория движения,
![]() – начальная предполагаемая траектория
движения. Тогда разность
– начальная предполагаемая траектория
движения. Тогда разность
![]() характеризует величину отклонения
системы от начальной предполагаемой
траектории. Если по величине этой
разности можно определить величину
управляющего воздействия
характеризует величину отклонения
системы от начальной предполагаемой
траектории. Если по величине этой
разности можно определить величину
управляющего воздействия
![]() ,
которое вернет систему на заданную
траекторию, то такое управление называется
регулированием.
,
которое вернет систему на заданную
траекторию, то такое управление называется
регулированием.
Примеры: движение автомобиля, управление инвестиционными проектами, сопровождающееся незначительными дополнительными действиями для реализации проекта – дополнительное финансирование, изменение материальных ресурсов и т.д., индексирование заработной платы, изменение величины налогов и пр.
3. Управление по
параметрам
– если отклонение
![]() настолько велико, что регулирующего
воздействия
не достаточно, чтобы вернуть систему
на исходную траекторию, то в целях
возврата системы на исходную траекторию
необходимо внести изменения в параметры
функционирования системы. Такое
управление называется управлением по
параметрам.
настолько велико, что регулирующего
воздействия
не достаточно, чтобы вернуть систему
на исходную траекторию, то в целях
возврата системы на исходную траекторию
необходимо внести изменения в параметры
функционирования системы. Такое
управление называется управлением по
параметрам.
Примеры: изменение параметров движения автомобиля, изменения в составе правительства, руководства и менеджеров фирмы и т.д.
4. Управление по структуре – в некоторых случаях и управление по параметрам становится недостаточным для возвращения системы на исходную траекторию. В этих случаях возможно достижение системой цели, если произвести изменения структуры системы.
Примеры: установка дополнительного оборудования на автомобиль, изменение структуры компании, государственного строя, структуры управления.
Самоуправляемая система – система, подсистема управления которой находится внутри самой системы.
Примеры: вуз, государство, человек, автопилот самолета и т.д.
Автоматическое регулирование. Регулирование осуществляется согласно жестко регламентированному алгоритму посредством некоторого устройства.
Примеры: поплавковая система регулирования подачи воды, стиральная машина-автомат, простейшие бытовые, игровые и производственные автоматы, большинство процессов, происходящих в живых и растительных организмах.
Программное управление – управление происходит по программе.
Примеры: все приборы, техника со встроенными процессорами, процедуры в пакетах прикладных программ и т.д.
Параметрическая адаптация – система сама меняет параметры.
Примеры: изменение цвета и формы животных и растений в зависимости от времени суток, автоматическая настройка параметров в компьютере и т.д.
Самоорганизация (или структурная адаптация) – изменение структуры системы под влиянием внутренних импульсов.
Примеры: мутация живых организмов, вирусов, видовые изменения животного мира в результате эволюции и т.д.
Смешанная система – присутствуют элементы управления извне и самоуправления, наиболее часто встречающийся вид систем.