

Реквизиты алгоритма.
В общем случае описание алгоритма в библиотеке имеет три реквизита:
1) библиотечный номер; 2) модификатор; 3) Масштаб времени.
Библиотечный номер ( РАН(20), где РАН это код, а 20 это номер ) представляет собой двухзначную десятичную цифру и является основным параметром, характеризующим свойства алгоритма. В библиотеке есть номера, которые не соответствуют ни одному из алгоритмов. Такие номера называются пустыми, а алгоритм соответствующий этому номеру «пустой». Алгоблок с пустым алгоритмом не имеет входов-выходов и никакой работы не выполняет, а также не влияет на работу других алгоблоков, но в ОЗУ занимает определённое место и требует некоторого времени на обслуживание.
Модификатор задает дополнительные свойства алгоритма. Обычно модификатор задает число однотипных операций. Например, в сумматоре модификатор задает число суммируемых входов; в программном задатчике – число участков программы и т.п. В отдельных случаях модификатор задаёт набор определённых параметров, в алгоритме контроля контура регулирования модификатор задаёт параметры контура, локальный контур или каскадный, аналоговым или импульсным регулятором и т.д.
Масштаб времени имеется только в алгоритмах, чья работа связана с реальным временем, например, в таких как регулирование, программный задатчик, таймер и т.д. Масштаб времени задает одну из двух размерностей для временных сигналов или параметров. Если контроллер в целом настроен на младший диапазон , то масштаб времени индивидуально в каждом алгоблоке задает масштаб «секунды» или «минуты». Для старшего диапазона масштаб времени задает «минуты» или «часы». Алгоритмы с одним и тем же номером, помещаемые в различные алгоблоки, могут иметь индивидуальные в каждом алгоблоке модификатор и масштаб времени. Наличие модификатора и масштаба времени существенно расширяет возможности алгоритмов. Например, в одном алгоблоке может размещаться программный задатчик, имеющий несколько участков программы протяжённостью несколько секунд.
5.Характеристика виртуальной структуры контроллеров р-130. Особенности обслуживания алгоблоков. Задачи и порядок конфигурирования контроллера.
Основным преимуществом микропроцессорных средств автоматического управления и регулирования является программируемость. Микропроцессорный контроллер по сути является миниатюрной электронной вычислительной машиной (ЭВМ), решающей конкретную задачу. Как и ЭВМ контроллер имеет порты ввода и вывода информации и арифметическо-логическое устройство (алгоритмические блоки) для её обработки. При подготовке контроллера к работе в него вводится программа в которой определяются порты ввода-вывода информации, а также алгоритм его обработки. Таким образом, как бы создаётся структурная схема.
Особенность заключается в том, что эта схема существует не в физическом смысле ( в реальности), а на уровне программы, такие структурные схемы получили название виртуальных. Для того чтобы изменить структуру ничего не надо отключать, переключать. Достаточно ввести новую программу с новой структурной связью и алгоритмом обработки.
Виртуальная структура.
Виртуальная структура описывает информационную организацию контроллера и характеризует его как звено системы управления. Часть виртуальной структуры реализуется с помощью аппаратных средств, а часть – программно. Все программное обеспечение виртуальной структуры хранится в ПЗУ и пользователю недоступно, независимо от реализации элементов виртуальной структуры.
Элементы виртуальной структуры.
Аппаратура ввода-вывода информации.
Аппаратура оперативного управления и портом
Аппаратура интерфейсного канала.
Алгоритмические блоки.
5.Библиотека алгоритмов
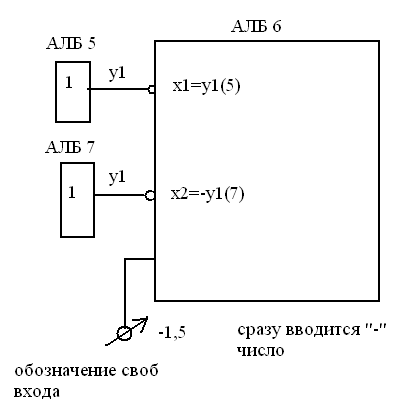
Задачи конфигурирования: для каждого входа, каждого алгоблока задаётся источник сигнала (т.е. его адрес) Адрес задаётся в виде номер алгоблока и номера его выхода.
Состояния входов: 1.Связанные (подключены с каким-либо выходом А или Б)
2. Свободные ( не подключаются)
Свободные: 1) const ( нельзя изменять в режиме «работа», можно изменять в режиме «программирования»)
2) коэффициент (возможно изменение во всех режимах)
Для свзяанного режима можно ввести инверсию. Инверсию для свободных блоков ввести нельзя.
Обслуживание алгоблоков.
1) Циклически : Т0 – время цикла. Т0=0,2…2,0 сек (дельта t =0.2 сек)
Таб – время затраченное на обслуживание алгоблока
Тин – время затр. на обсл. итнтерфейсного канала
Тсд – время самодиагностики, контроля.
Таб + Тин + Тсд < T0
Резерв. времени : дельта t>=0.08 сек
2) Обработка АБ производится в соответствии с их номерами

Необходимо заботиться о том, чтобы не происходило лишней задержки алгоритмов из-за нумерации АБ.