

6. Обеспечение безударности переключения режимов Авт-Руч. Балансировка регуляторов с помощью следящих алгоритмов и процедуры обратного счёта.
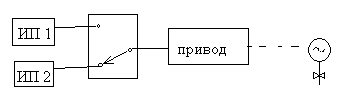
Спец алгоритмы – следящие( откл источник должен повторять сигнал рабочего источника)
Процесс отслеживания сигнала – балансировка
Статическая(ν=0) – сигнал запоминается и после переключения в активный режим.
Сигнал остаётся таким же.
Сигнал изменяется до первоначально заданного
Понятие обратного счёта
Задача процедуры – расчёт сигнал, который нужно подать на вход каждого алгоритма подключенной цепочки, чтобы на выходе последнего алгоритма сигнал стал равен тому значению которое формируется активным алгоритмом
Пример 1 – Хос обратного счёта
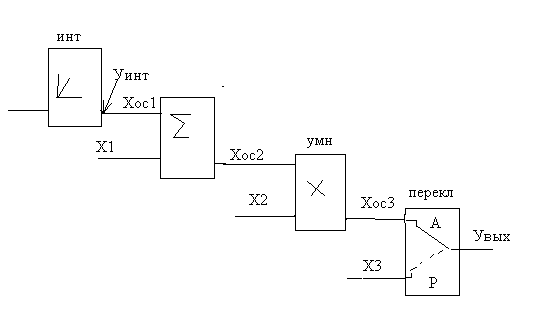
Инт отключен Увых=Х3
Хос3=Увых Хос3= Хос2/Х2 Хос3= Хос2- Х1 Уи(tk)= Хос1
Переключение Р-А (включен инт)
Увых(tk+1)= (Уинт+Х1)Х2= (Хос2- Х1+ Х1) Х2= (Хос3/ Х2) Х2= Хос3= Увых(tk)
Т.к. Увых(tk+1)= Увых(tk) то это безударное переключение
Условие обеспечения безударности - Наличие в цепочке одного следящего алгоритма(должен обладать памятью – содержать интергатор)
Виды следящих алгоритмов:
ИНТ – алгоритм интегрирования
ЗДН – задатчик
РАН – регулятор с аналоговым выходом
РИМ – регулирование импульсное
РУЧ – ручное дистанционное управление
ИНЗ – интегрирующий задатчик
ДИБ – динамическая балансировка

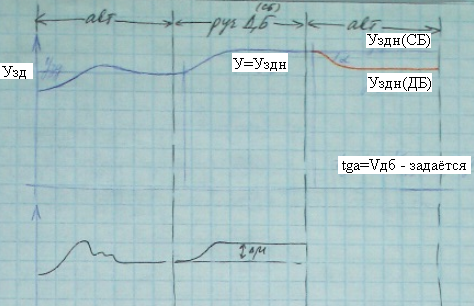
Пример 2 – переключение с алгоритмом РАН
Режим РУЧ
Увых(tk)= Уруч(tk) При этом Уп= Уд=0 и Уи(tk)= Уруч(tk) – всё это благодаря РАН
Если СБ или ДБ, то дополнительно
Уздн(tk)= Хос3- (Х1+ Х2) при этом ε(tk)=0
Уреч(tk)= Уруч(tk)
В момент переключения Р-А
Увых(tk+1)= Уи(tk)= Увых(tk) – безударный переход
Далее 3.1 – Если СБ(ЗДМ), то Уздн(t)= Уздн(tk)=соnst
3.2 – Если ДБ (ЗДН) то Уздн(t)= Уздн-норм – заданное до перехода на ручной режим
Наличие СД позволяет исключить внешний задатчик
ДБ необходимо когда строго регламентируется значение величины
7. Этапы проектирования аср и технологического программирования контроллеров р-130.
Конфигурирование Р-130.
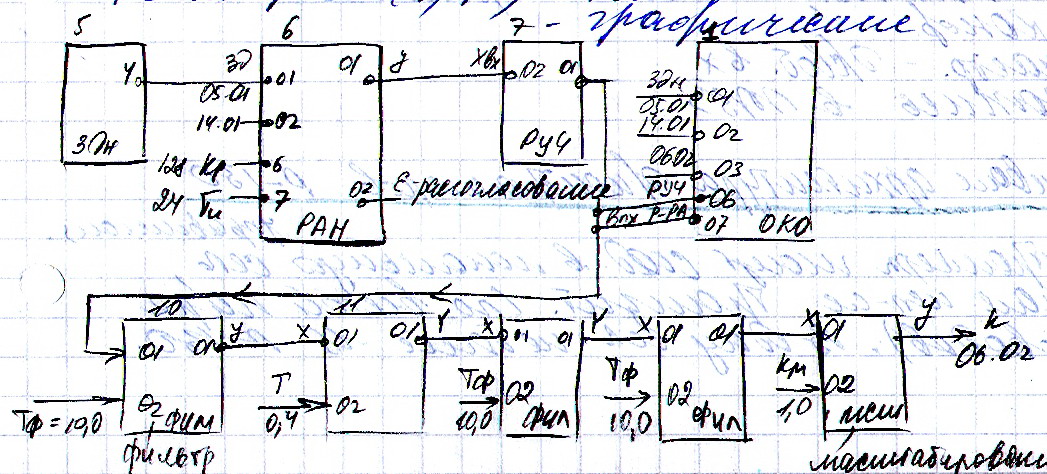
(ЗДН-задатчик, АН-аналоговый регулятор, &-признак константы, ε-сигнал рассогласования, ОКО-оперативный контроль объекта, МСШ-масштабатор).
АСР проектируется в табличном и графическом редакторе. При конфигурации обслуживаются только входы. Соединение указывается через «точку», а значение с разделением «запятая».
Указанные алгоритмические схемы готовятся с помощью спец. ПО и без связи со своим контроллером на любом компьютере.
Далее: загрузка подготовленной программы в контроллер, устанавливается связь с контроллером и указывается тип соединения – COM2-порт.
Устанавливаются системные параметры:
- №бк – номер блока контроллера;
- режим интерфейса (допускается изменение структуры или нет): командный или информационный режимю
- Т – время цикла для связи контроллера с ПК.
Характеристика процедур технологического программирования Р-130:
(лицевая панель ПН-1 – раздаточный материал «Микропроц. контр-ры Р-130», стр.5)
Включение режима программирования «ПРГ»:
нажимаются стрелки «вниз» и «вправо».
1.) ТЕСТ – тестирование памяти.
3.) ПРИБ – установка приборных параметров, характеризующих свойства железа и контроллера.
ОПЕРАЦИИ: 00-обнуление; 01-установка комплексности; 02-режим структуры(разрешить изменение или нет); 03-время цикла БК(блока контроллера); 04,05-ресурсы ОЗУ1 и ОЗУ2.
3.) Системн.: - №бк, режим инт.
4.) АЛГ-размещение алгоритмов по алгоблокам (№ АЛБ, АЛГ, m, МВ-масштаб времени).
5.) Конф. – указ. источник сигнала.
6.) Настройка – для свободного входа.
7.) Начальные условия.