

Характеристика интерфейса rs-232c
RS – recommended standard или EIA
Определяет:
Физические свойства (например, определяет сигнал синхронизации, функции сигналов)
Протокол обмена информации
Механический разъем
Получил развитие в 1969-1991гг. Использует 22 сигнала на 25 контактном разъеме.
Виды устройств:
DIE – терминальные
DCE – коммуникационное (связное) оборудование
Вид передачи:
Асинхронный
Пакетный
Последовательный
Пакет:
Один символ ASCII (семь бит)
Дополнительный бит для начала и конца пакета (стартовый и стоповый бит)
Бит паритета для контроля ошибок (по четности)
Характеристика универсального приемо – передатчика (uart). Передача сигналов с использованием дифференциальной линии связи по интерфейсам rs-422 и rs-485.
Характеристика универсального приемо-передатчика (UART). U-универсальный, A-асинхронный,
R-приемник, Т-передатчик. (УАПП)
Состав:
- тактовый генератор
- набор регистры (передача, прием и др.)
- буфер приемника и буфер передатчика
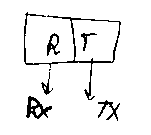 существуют
одновременно, независимо друг от друга
(каждый имеет свою ножку-контакт)
существуют
одновременно, независимо друг от друга
(каждый имеет свою ножку-контакт)
Для цельной синхронизации, помимо основной частоты, формируются импульсы (стробы), кратные основному периоду.
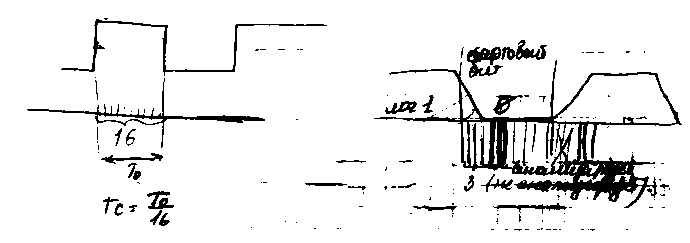 -
Помехозащищенность – за счет анализа,
путем голосования по 3-м импульсам.
-
Помехозащищенность – за счет анализа,
путем голосования по 3-м импульсам.
- Допускается некоторые различия в частоте работы приемника и передатчика
При скорости 115200 длина 1.5 метра
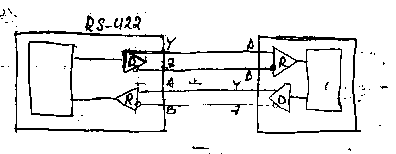
Передача сигналов с использованием дифференциальной линии связи по интерфейсам RS-422 и RS-485.
Схема передачи сигнала

Такой вариант помехоустойчив к синфазной помехе.
RS422 – полнодуплексный интерфейс (двунаправленный)
 RS485-
полудуплекстный интерфейс (одна пара
проводов, передача с разделением по
времени, количество D(передатчик)
- несколько)
RS485-
полудуплекстный интерфейс (одна пара
проводов, передача с разделением по
времени, количество D(передатчик)
- несколько)
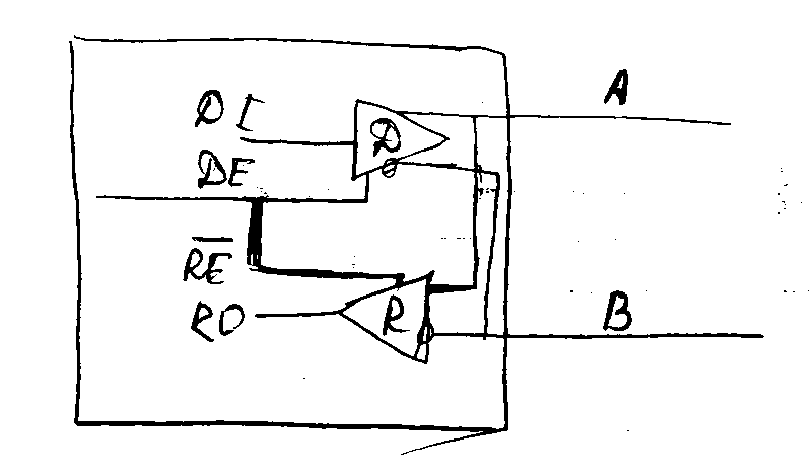
DE – разрешение для передатчика, DI-вход передатчика, RO – выход приемника, RE – разрешение приемника
Характеристика интерфейса RS-485. Схема связи между контроллерами. Применение согласующих резисторов и защитного смещения.
RS485- полудуплекстный интерфейс (одна пара проводов, передача с разделением по времени, количество D(передатчик) - несколько)
DE – разрешение для передатчика, DI-вход передатчика, RO – выход приемника, RE – разрешение приемника.
Схема связи между устройствами:
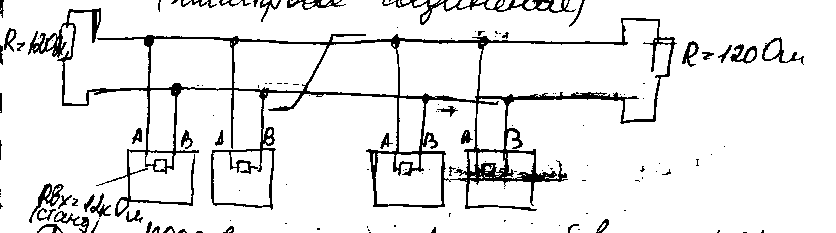
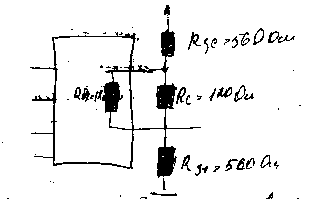
R-волновое сопротивление для подавления отражения энергии волны
Rн≥375Ом, nуст≤32
Применение защитного смещения:
Уровень сигналов:
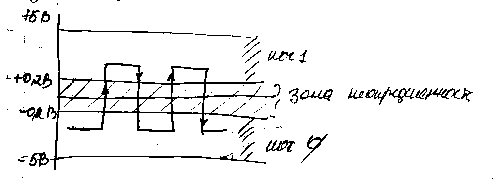
Защитное смещение – искусственно при отсутствии сигнала создать определенное состояние.
16. Характеристика рк131/300 и кр300 серии «Контраст».
Состав контроллеров серии КОНТРАСТ. Контроллеры являются проектно-компонуемыми изде-
лиями, содержащими базовый комплект аппаратуры и проектно-компонуемый комплект, состав которого зависит от номенклатуры и числа каналов ввода-вывода информации. Модификация центральногоблока и состав дополнительных блоков определяются картой заказа.
В состав контроллеров входят:
Центральный блок – блок контроллера БК.
Блоки устройств связи с объектом БУСО.
Связь блоков контроллера КР-300 представлен на рис. 4.1.
Блок контроллера БК ведет обработку информации в цифровой форме по запрограммированным
пользователем алгоритмам управления, производит обслуживание лицевой панели ПЛ. В состав блокаконтроллера входит модуль процессора ПРЦ-301 и до трех модулей ввода-вывода аналоговых и дискретных сигналов. На лицевой панели блока размещены органы оперативного контроля и управления.
На задней панели расположены гнезда пяти разъемов: трех – для подключения датчиков и исполни-
тельных механизмов (цепи УСО), одного – для подключения шины параллельного интерфейса (БУСО),одного – для подключения приборных цепей (БП): питания, аварийных цепей и сетевого интерфейса.
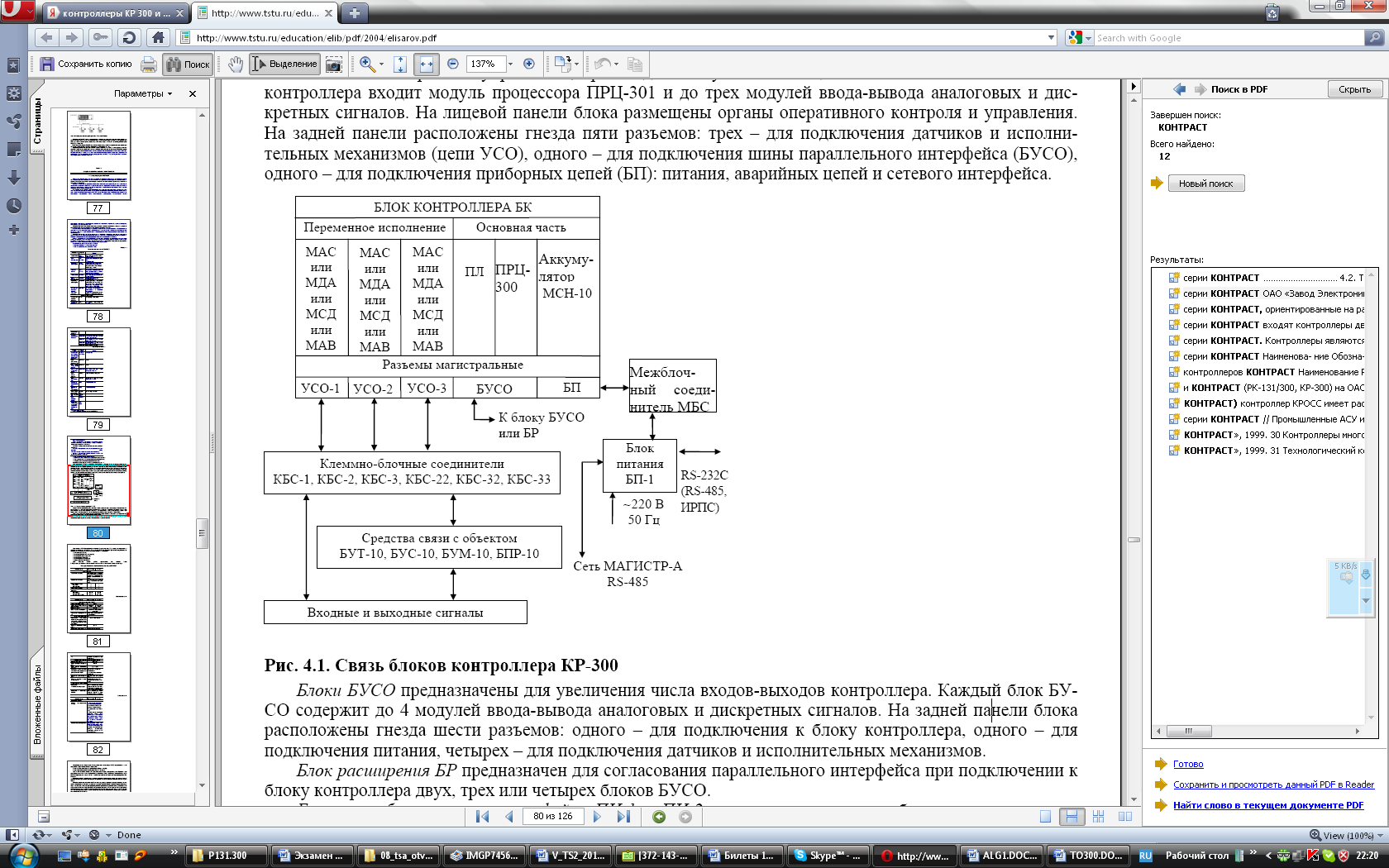
Блоки БУСО предназначены для увеличения числа входов-выходов контроллера. Каждый блок БУ-
СО содержит до 4 модулей ввода-вывода аналоговых и дискретных сигналов. На задней панели блокарасположены гнезда шести разъемов: одного – для подключения к блоку контроллера, одного – дляподключения питания, четырех – для подключения датчиков и исполнительных механизмов.
Блок расширения БР предназначен для согласования параллельного интерфейса при подключении к
блоку контроллера двух, трех или четырех блоков БУСО.
Блоки преобразователя интерфейса ПИ-1 и ПИ-2 используются для преобразования последова-
тельных интерфейсов, соответственно RS-232C/RS-485 и RS-232C/ИРПС.
Блок питания БП-Ш предназначен для питания блока контроллера БК, а также для подключения к
контроллеру внешних интерфейсов. Блок питания БП-Ш вырабатывает три нестабилизированных на-
пряжения 24 В постоянного тока, которые используются для питания:
блока контроллера БК;
цепей дискретного ввода-вывода БК;
цепей аналогового вывода БК;
интерфейсных цепей БК;
цепей аварийного выхода БК;
усилителей БУТ-10, БУС-10.
Блок питания БП-4М (БП-1) предназначен для питания блока
БУСО, а также для питания цепей дискретного ввода-вывода и аналогового вывода контроллера.
Программирование контроллеров. Программирование контроллера КР-300 осуществляется с ис-
пользованием двух технологических языков [30]:
• языка Функциональных Алгоритмических БЛоков – ФАБЛ;
• языка высокого уровня Процедурный Текст – Протекст.
Язык ФАБЛ наиболее удобен для программирования задач регулирования, язык Протекст – для
программирования задач логико-программного управления, пусков, остановов, математической обра-ботки информации, хотя каждый из них является функционально-полным для программирования лю-бых задач.
Программирование контроллеров и отладка программ пользователя ведется при помощи персо-
нального компьютера и пакета ИСТОК (Интегрированная Среда Технического Обслуживания Контрол-леров).
Грамматической основой языка ФАБЛ является структура (структурная схема), состоящая из эле-
ментов, называемых алгоблоками, и связей между ними. Каждый алгоблок является формальным струк-турным элементом, которому при программировании присваивается функция путем размещения в ал-гоблоке определенного алгоритма из библиотеки алгоритмов языка. После этого алгоблок приобретаетсоответствующие входы и выходы, через которые алгоритм получает входные данные и выдает выход-ные. Программирование задач на языке функциональных блоков заключается в выполнении следующейпоследовательности процедур:
• размещение в алгоблоках необходимых алгоритмов;
• конфигурация алгоблоков путем установки связей между входами и выходами алгоблоков, а сле-
довательно, и алгоритмов.Выполнение программы осуществляется путем последовательного выполнения алгоритмов, размещенных в алгоблоках, по порядку увеличения номера алгоблоков, с первого до последнего. На этом за-канчивается один цикл выполнения программы и начинается следующий
и т.д.
При обработке каждого алгоблока выполняются следующие действия:
• загрузка входных значений алгоритма;
• вычисление и запоминание выходных и внутренних u1079 значений.
Грамматика языка функциональных блоков обеспечивает следующие количественные характери-
стики:
• максимально возможное число алгоритмов – 255;
• максимально возможное число функций одного алгоритма – 255;
• максимально возможное число входов алгоритма – 127;
• максимально возможное число выходов алгоритма – 127;
• максимально возможное число алгоблоков – 999.
Полный перечень сигналов, обрабатываемых алгоблоками, включает следующие типы:
• аналоговый;
• временной;
• числовой;
• дискретный;
• масштабный коэффициент;
• коэффициент пропорциональности;
• скорость изменения;
• длительность импульса;
• технические единицы.
Алгоритмический язык Протекст является технологическим языком высокого уровня класса
«Структурированный текст» и ориентирован на решение логических задач и задач обработки данных по алгоритмам пользователя.
ЯЗЫК ПРОТЕКСТ ЯВЛЯЕТСЯ ТЕКСТОВЫМ ЯЗЫКОМ, ГРАММАТИКА КОТОРОГО
ВКЛЮЧАЕТ В СЕБЯ:
• переменные языка;
• операции над переменными;
• выражения;
• операторы;
• встроенные функции.
Технологическая программа пользователя состоит из двух частей: заголовка и программы управле-
ния. В заголовке технологической программы содержится информация о конфигурации системы, заказанных переменных, таймерах, а также определяемые пользователем макрорасширения. Структурнопрограмма управления состоит из блоков
(0 – 255), каждый из которых состоит из секций (0 – 255) с операторами языка. Разбиение программы наблоки и секции, а также возможность управления их работой позволяет u1089 создавать гибкие программы,структуры которых будут соответствовать структурам управления технологическим процессом.
В языке определены следующие типы переменных:
• числовые;
• временные (таймеры);
• дискретные.
Числовые переменные делятся на целые (ЦК, ЦС, ЦД) и вещественные (ВЩ). Целые переменные
имеют три формата: короткий ЦК(1 байт), стандартный – ЦС (2 байта), длинный – ЦД (4 байта).
Временные переменные (таймеры) – ТМ имеют два формата: секундный (ТМС) и десятимиллисе-
кундный (ТММ).
В программах переменные можно указывать либо в виде типа переменной и ее номера (например,
ЦК1, ВЩ5), либо в виде технологического идентификатора (ТЕМПЕРАТУРА 1, ДАВЛЕНИЕ 7 и т.п.),который при трансляции будет заменен препроцессором языка конкретным типом и номером. Это свойство позволяет значительно улучшить читаемость технологических программ при минимальном объемекомментариев.
К дискретным переменным относятся:
• дискретные переменные ДП, соответствующие дискретным входам и выходам контроллера, а
также хранящие промежуточные результаты;
• ключи таймеров – КТС, КТМ;
• ключи блоков КБ;
• ключи секций КС.
Ключ таймера служит для отключения или включения соответствующего таймера.
Ключи блоков и секций применяются для блокировки блоков и секций.
Выражения, операторы и встроенные функции языка Протекст. Выражения вычисляются слева
направо в порядке увеличения приоритета операций. Количество операндов в выражении не ограниче-
но, но они должны быть либо одинакового, либо совместимых типов. При наличии в выражении пере-
менных различных типов при выполнении арифметических операций происходит соответствующее
преобразование типов. Например, если в некоторой арифметической операции в качестве операндов ис-
пользуются данные целого и вещественного типов, то результат будет иметь вещественный тип.
Отличия от Р-130
Более мощный процессор
Языки программирования: 1) ФАБЛ(язык функциональных алгоблоков). Протекст – процедурный язык высокого уровня, запись условий, не содержат логичекие и алгебраические выражения.
Запись и хранение программ и параметров в энергонезависимую память(флэшпамять с элект. записью и элект. спиралью)
наличие специальной флэшпамяти для архивации данных. 1 Мбайт
возможность объединения БК(блоков контроллеров) в локальную сеть МАГИСТР.
возможность взаимодействия с верхним уровнем(ЭВМ) без БК
возможность регистрации данных с ОЗУ контроллером
Наличие функц. подсистем
КР-300 — это компактный многоканальный многофункциональный высокопроизводительный микропроцессорный контроллер, предназначенный для автоматического регулирования и логического управления технологическими процессами. Контроллер КР-300 эффективно решает как сравнительно простые, так и сложные задачи управления.
Контроллер предназначен для построения управляющих и информационных систем автоматизации технологических процессов малого и среднего (по числу входов-выходов) уровня сложности и широким динамическим диапазоном изменения технологических параметров, а также построения отдельных подсистем сложных АСУ ТП, обеспечивая при этом оптимальное соотношение производительность/стоимость одного управляющего или информационного канала.
Контроллеры КР-300 могут объединяться в локальную управляющую сеть МАГИСТР с конфигурацией «общая шина» и настраиваемой пользователем скоростью передачи данных. Для такого объединения никаких дополнительных устройств не требуются. Через сеть контроллеры могут обмениваться информацией в цифровой форме по витой паре проводов. Производительность сети обеспечивает обмен данными в реальном времени и позволяет рассматривать контроллеры сети как единую распределенную в пространстве систему.
Регулирующая подсистема контроллера позволяет вести локальное, каскадное, программное, супервизорное, многосвязное регулирование. Архитектура этой подсистемы обеспечивает возможность вручную или автоматически включать, отключать, переключать и реконфигурировать контуры управления, причем все эти операции выполняются безударно независимо от сложности структуры управления. В сочетании с обработкой аналоговых сигналов эта подсистема позволяет выполнить также логические преобразования сигналов и вырабатывать не только аналоговые или импульсные, но и дискретные команды управления.
Логическая подсистема контроллера формирует логическую программу шагового управления с анализом условий выполнения каждого шага, заданием контрольного времени на каждом шаге и условным или безусловным переходом программы к заданному шагу. В сочетании с обработкой дискретных сигналов эта подсистема позволяет выполнять также разнообразные функциональные преобразования аналоговых сигналов, вырабатывать не только дискретные, но и аналоговые управляющие сигналы.
Подсистема группового контроля и управления осуществляет информационный контроль и ручное управление большим количеством аналоговых и дискретных сигналов. В сочетании с возможностями контроллеров по обмену данными через контроллерную сеть эта подсистема обеспечивает работу контроллера в качестве диспетчера контроллерной сети, осуществляющего сбор, контроль и изменение данных других контроллеров.
Регулирующая, логическая и групповая подсистемы контроллера содержат встроенные программные средства взаимодействия с пультом контроллера, обеспечивающие его работу в стандартных штатных режимах, описанных в инструкции по эксплуатации. Эти средства позволяют вручную изменять режим работы, устанавливать задание, управлять ходом выполнения программы, вручную управлять исполнительными устройствами, контролировать сигналы и индицировать ошибки.
Программируемая подсистема обеспечивает взаимодействие с пультом на более низком уровне ¾ѕ клавиш, светодиодов, цифровых индикаторов, что позволяет программировать работу пульта с помощью языка ПроТекст и создавать нестандартные, в том числе объектно-ориентированные режимы работы пульта. В этом случае инструкция по оперативному управлению контроллером создается разработчиком технологической программы.
Контроллер может выполнять свои функции, как в приборном, так и в календарном времени, как в приборных, так и в физических размерностях технологических параметров.
Стандартные аналоговые и дискретные датчики и исполнительные устройства подключаются к контроллеру КР-300 с помощью индивидуальных кабельных связей. Внутри контроллера сигналы обрабатываются в цифровой форме.
В контроллере КР-300 встроены развитые средства самодиагностики, сигнализации и идентификации неисправностей, в том числе при отказе аппаратуры, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по сети и т.п. Для дистанционной передачи информации об отказе предусмотрены специальные дискретные выходы.
В состав контроллера входят: Центральный блок контроллера, Блок расширения, Модуль аналоговых сигналов, Модуль аналоговых и дискретных сигналов, Модуль вывода аналоговых сигналов, Модуль дискретных сигналов (5 модификаций), Блок питания, Блок питания БУСО, Блок питания групповой, Блок усилителей сигналов низкого уровня, Блок усилителей сигналов резистивных датчиков, Блок усилителей мощности, Блок переключения, Резисторы нормирующие, Межблочный соединитель для приборных целей, Межблочный соединитель БУСО, Шлюзовой соединитель, Клеммно-блочный соединитель для размножения общих точек, Клеммно-блочный соединитель для БП-Ш, БУТ-10, БУС‑10, БУМ-20, Клеммно-блочный соединитель для БП-Ш, БУТ-10М, БУС-‑10М, БУМ-20, Клеммно-блочный соединитель для дискретных цепей ввода-вывода БК (БК-М), БУСО (БУСО-М), БПР-10, Клеммно-блочный соединитель для аналоговых цепей ввода-вывода БК и БУСО, Сдвоенный клеммно-блочный соединитель для БП-ШМ БУТ-10М, БУС-10М, БУМ-20М, Сдвоенные клеммно-блочные соединители аналоговых и дискретных цепей ввода-вывода.
Программное обеспечение имеет алгоритмическую структуру и подразделяется на несколько блоков: алгоритмы лицевой панели, алгоритмы обмена по сети «Магистр», алгоритмы ввода-вывода инфо с усо, АЛГОРИТМЫ СИСТЕМНОГО КОНТРОЛЯ, АЛГОРИТМЫ РЕГУЛИРОВАНИЯ, ДИНАМИЧЕСКИЕ, СТАТИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ.
Контроллер имеет два внешних последовательных порта, на которых реализованы внешние интерфейсы контроллера — шлюзовой канал ШК и канал маркерной сети МК.
1. Канал ШК используется для связи с верхним уровнем в режиме “ведомого”, резервирования контроллеров и имеет следующие характеристики:
интерфейс канала — RS-232C/ИРПС/RS-485 (RS-485 по заказу);
гальваническая развязка — для ИРПС и RS-485;
длина линий связи — до 4 км, зависит от интерфейса (для RS-232C — до 20 м) и установленной скорости передачи данных;
тип линий связи —одна (RS-485) или две витые пары.
2. Канал МК используется для подключения к маркерной локальной сети, резервирования контроллеров и имеет следующие характеристики:
тип канала — асинхронный;
топология сети — «общая шина»;
интерфейс — RS-485;
число контроллеров в сети — до 31;
метод доступа к сети — интервально-маркерный;
скорость передачи данных — 38,4 Кбод, 57,6 Кбод, 115,2 Кбод, 250 Кбод, 500 Кбод, устанавливается пользователем;
гальваническая развязка — имеется;
длина линии связи сети — до 1,2 км в зависимости от установленной скорости передачи данных;
тип линий связи — витая пара или коаксиальный кабель.