

12. Характеристика интерфейсов, применяемых для микропроцессорных контроллеров. Характеристика интерфейса ирпс (токовая петля).
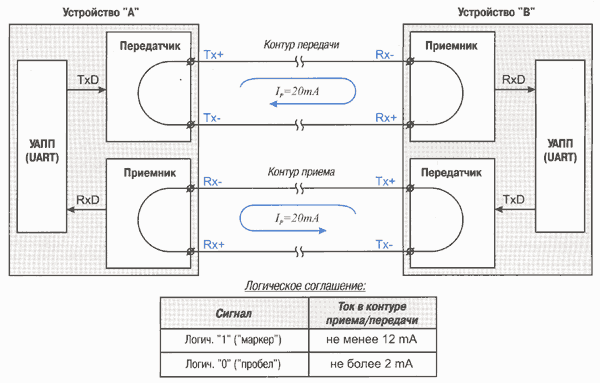
Стандарт цифровой токовой петли (ИРПС) использует отсутствие тока как значение SPACE (высокий уровень, логическая единица) и наличие сигнала — как значение MARK (низкий уровень, логический ноль). Отсутствие сигнала в течении длительного времени интерпретируется как состояние BREAK (обрыв линии).
Токовая петля (ИРПС) может использоваться на значительных расстояниях (до нескольких километров). Для защиты оборудования, подключенного к интерфейсу токовая петля (ИРПС) применяется гальваническая развязка.
Логическая организация:
Каждому контроллеру присваивается системный номер <15. Присваивается в процессе программирования.
Обмен между блоками контроллеров по сети Транзит ( используются ИНВ и ВИН)
Виды совместимости
Виды совместимости:
Информационная
Электрическая
Конструктивная
Структура интерфейса в системе сбора и обработки информации:

ФМ – функциональный модуль (обеспечивает обмен информации
ИФМ – интерфейсный модуль:
D – драйвер – передатчик информации
R – ресивер – приемник
К – контроллер (кодирование информации)
Физ. канал связи – технические средства для пропуска информации
Достаточно только D или R. Не обязательно оба устройства
Два направления передачи – полный дуплекс
Одно направление – полудуплекс
Управление:
Централизованное, при помощи МКИ – модуль контроллера интерфейса для централизованного управления. Либо К(ИФМ) каждого модуля.
Информационная совместимость – согласованность взаимодействия в соответствии с логическими условиями.
Определяется следующими характеристиками:
Структура и состав набора шин
Набор процедур в реализации взаимодействия и последовательности их выполнения
Способ кодирования и форматы команд данных, адресов и состояния
Временные соотношения для сигналов управления, их формы и взаимодействия
Информационная совместимость влияет на объем и сложность в схемах технических решений и программах обеспечения => на основные технико-экономические показатели
Электрическая совместимость – согласованность статических и динамических параметров сигнала, используемых в системе шин с учетом ограничений на пространственное размещение устройств интерфейса и техническую реализацию приемников и передатчиков.
Характеристики:
Тип приемо-передающих элементов D и R
Соотношение между логическими и электрическими состояниями
Нагрузочная способность D и R
Схема согласования линий
Порядок подключения разъемов связи к линии
Требования к источниками питания
Требования по помехозащищенности
Влияние характеристик электрической совместимости на:
Скорость обмена
Предельное количество подключений
Конфигурацию подключений
Расстояние L
Помехозащищенность
Конструктивная совместимость – согласованность конструктивных элементов для механического контакта электрических соединений, для обеспечения замены элементов, блоков и устройств.
Характеристики:
Тип разъемов, соединений линий внутри соединительного элемента
Конструкция плат, стойки, каркаса
Конструкция кабельного соединения
Организация физических каналов связи:
Канал связи – совокупность передатчика D, линий связи и приемника R, которые обеспечивают передачу информации в одном направлению
Основные характеристики, которые относят к каналам связи:
Скорость передачи данных - определяет максимальную скорость работы канала (Мбайт/с) – техническая скорость передачи
Пропускная способность канала (Channel capacity) – количество информции, которую можно передать в единицу времени (бит/с) – реальная скорость передачи
Пропускная способность зависит от конкретных условий.
Цель: увеличить пропускную способность (при этом растет стоимость)
Полоса пропускания (band width) – диапазон частот, который канал способен передавать при затухании менее 3,5 дБ (50% падения мощности)
Для телефонной линии f=300-3400 Гц => W=3,1 кГц