

4.21. Ферромагнитный усилитель
Нелинейность свойств магнитопроводов лежит в основе работы многих устройств, среди которых особое место отводится управляемым нелинейным элементам. Наиболее широкое практическое применение нашли магнитные усилители, способные усиливать ток и мощность. Результирующий магнитный поток магнитного усилителя является суммой магнитных потоков, создаваемых МДС на различных частотах. Для этого на общий магнитопровод наматывают две обмотки: рабочую (Wр) и управления (Wy) (рис.4.21.1).
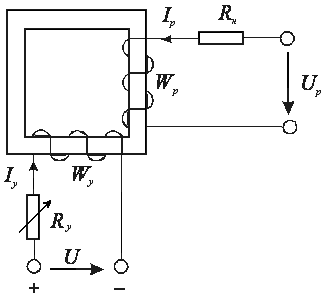
Рис.4.21.1. Схема простейшего магнитного усилителя.
По обмотке управления протекает постоянный ток, который дополнительно создает в магнитопроводе постоянный магнитный поток. Последовательно с рабочей обмоткой подключено сопротивление RН. Рабочая обмотка питается от источника синусоидального тока. Магнитный усилитель сконструирован так, что в отсутствии тока управления магнитопровод не насыщен, а при появлении тока в обмотке управления в магнитопроводе появляется постоянный магнитный поток, который при сложении с синусоидальным магнитным потоком рабочей обмотки переводит рабочую точку в область насыщения кривой намагничивания, а следовательно, к снижению сопротивления рабочей обмотки. Для иллюстрации приведенного вывода проведем ряд графических построений (рис.4.21.2).
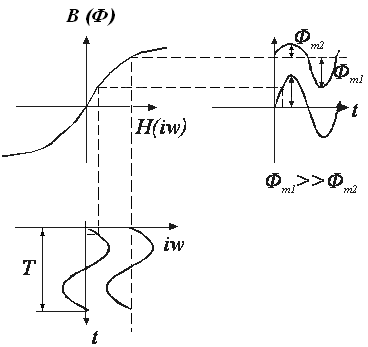
Рис.4.21.2. Графики, иллюстрирующие изменение тока нагрузки
при подмагничивании
При отсутствии тока в обмотке управления синусоидальному магнитному потоку рабочей обмотки соответствует практически синусоидальный ток (iр). При подаче на обмотку управления некоторого постоянного напряжения дополнительно появляется постоянный магнитный поток в магнитопроводе, суммарный магнитный поток возрастает до Ф0+Фмsinωt а, суммарные ампер-витки - до величины ipWp+iyWy . В смещенной в область насыщения зависимости Ф0+Фмsinωt ФМ1>>ФМ2 , значит, и наводимая им ЭДС самоиндукции будет существенно меньше по амплитуде:
![]() .
.
При этом полученная зависимость ipWp+iyWy имеет значительно большую амплитуду. Этот же результат получим из уравнения электрического равновесия для магнитного усилителя:
![]() .
.
Из данного уравнения следует, что уменьшение ЭДС самоиндукции в обмотке при неизменности амплитуды рабочего напряжения Up вызовет увеличение тока, протекающего через RН. Таким образом, при незначительных изменениях тока в обмотке управления можно существенно изменять ток в нагрузке. Однако на практике такая схема не используется ввиду целого ряда присущих этой схеме недостатков. Главный недостаток - взаимное влияние рабочей обмотки и обмотки управления. Этот недостаток может быть преодолен соответствующими конструктивными решениями, на которых остановимся подробнее. Прежде всего, отметим, что в отсутствии тока управления магнитный поток почти синусоидален. В то же время при наличии тока управления он явно несинусоидален и в его составе присутствует вторая гармоника. Построим функцию магнитного потока Ф2 в увеличенном масштабе (рис. 4.21.3).

Рис.4.21.3. Разложение магнитного потока в магнитопроводе
Появление второй гармоники в составе Ф нежелательно. Однако она может быть сведена к минимуму, если использовать в составе магнитного усилителя не один, а два магнитопровода. При этом обмотки управления наматываются согласно, а рабочие - встречно. Исходя из сказанного, схема усилителя будет иметь вид в соответствии с рис. 4.21.4.
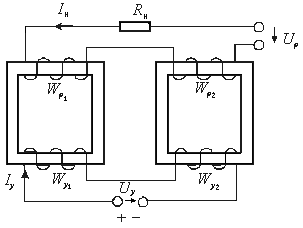
Рис.4.21.4. Дифференциальная схема магнитного усилителя
Использование двух магнитопроводов позволяет устранить влияние рабочей обмотки на обмотку управления, которая выражается в наведении ЭДС в обмотках управления магнитными потоками рабочих обмоток. Поскольку обмотки уравления Wy1 и Wy2 включены встречно, то наводимые в них ЭДС рабочими обмотками Wp1 и Wp1 вычитаются, следовательно, в цепи постоянного тока обмоток управления устраняются переменные “LC? Отрицательно влияющие на работу постоянного источника напряжения. Эффективность работы магнитного усилителя определяется следующими основными параметрами: коэффициентом усиления по току и мощности:
![]() ;
;
![]() .
.
Оптимальный режим работы магнитного усилителя удобно задать, если известно семейство его вольтамперных характеристик (рис.4.21.5). Откладываем по оси X произведение IнRн, а по OY - U1=IH∙ωLэ , где Lэ - условно-нелинейная индуктивность, зависящая как от переменного, так и от постоянного тока.

Рис.4.21.5. Вольтамперные характеристики магнитного усилителя
при разных токах управления
![]() .
.
Данное уравнение представляет собой уравнение окружности радиусом IнRн. Проведя дугу этой окружности в первом квадранте, находим точки пересечения с семейством вольт-амперных характеристик. Точка пересечения определяет рабочую точку, по которой при определенном токе управления находим напряжение и ток рабочей обмотки, причем с возрастанием тока управления уменьшается сопротивление рабочей цепи, что приводит к возрастанию тока и, следовательно, мощности нагрузки.