

ANSYS Mechanical
.pdfvk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Эквивалентно измененные общие деформации определяются следующим образом:
|
|
1 |
|
(εx −εy )2 |
+(εz −εy )2 +(εz −εx )2 |
|
3 |
(γxy )2 |
|
3 |
(γzy )2 |
|
3 |
(γzx )2 |
1 |
|
εet = |
|
|
+ |
+ |
+ |
2 |
(97) |
|||||||||
|
(1+ν ) |
2 |
2 |
2 |
|
|||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
||||||
Эквивалентные напряжения определяются как: |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
σe = E εet |
|
|
|
|
|
|
|
|
|
|
(98) |
4.3.9.3 Вязкопластичность
Вязкопластичность является формой пластичности, зависящей от времени, где развитие пластических деформаций зависит от скорости приложения нагрузки. Простейшим применением вязкопластичности является процесс высокотемпературной формовки металла, такой, как прокатка и глубокая вытяжка, вызывающие большие пластические деформации и перемещения с малыми упругими деформациями.
Вязкопластичность моделируется типами элементов VISCO106, VISCO107 и VISCO108, использующими для описания свойств материала модель Ананда (Anand).
Вязкопластичность определяется объединением пластичности и ползучести посредством набора пластических деформаций и эволюционных уравнений. Для сохранения объема в области пластичности используется уравнение ограничений.
Опция пластичности, зависящей от скорости деформации (вязкопластичности) или
TB,RATE позволяет вводить эффект скорости изменения деформаций в модели материалов для моделирования отклика материала, зависящего от времени. Применяются две опции материала, модель Пежины (Perzyna) и модель Пирса (Peirce). В отличие от других опций зависящего от скорости деформации материала, имеющихся в комплексе ANSYS, таких, как ползучесть или модель Ананда (Anand), модели Пежины (Perzyna) и Пирса (Peirce) также включают поверхность пластичности. Пластичность, и, таким образом, эффект упрочнения, связанный со скоростью деформаций, активизируется только после пластического деформирования. Для моделирования вязкопластичности требуется использовать модели в комбинации с опциями материала BISO, MISO или NLISO. Кроме того, анизотропная вязкопластичность может комбинироваться с опцией HILL.
Модель Пежины (Perzyna)
Для данной модели напряжения текучести материала рассчитываются по формуле:
σ = 1+ εγpl m σ0
где:
σ– напряжение текучести материала (material yield stress);
εpl – эквивалентный коэффициент пластической деформации (equivalent plastic strain rate);
m – параметр ужесточения коэффициента деформаций (strain rate hardening parameter); γ – вязкость материала;
σ0 – статическое напряжение текучести материала (static yield stress of material), зависит от некоторых параметров ужесточения (hardening).
Решение сходится к статическому при γ → ∞ , или при m → 0 , или при ε pl → 0 . Однако для данной модели материала при m<0,1 сходимость достигается плохо.
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
42 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Модель Пирса (Peirce)
Для данной модели материала напряжения рассчитываются по формуле:
σ = 1 + εγpl m σ0
Как и для модели Пежины (Perzyna) решение сходится к статическому при γ → ∞ , или при
m → 0 , или при ε pl → 0 . Однако при малых значениях m сходимость достигается намного лучше.
Модель Ананда (Anand)
Существуют два основных признака, характеризующих модель пластического поведения Ананда применительно к изотропным металлам. Во-первых, отсутствует задаваемая в явном виде поверхность текучести, отклик материала зависит от его текущего напряженного состояния. Во-вторых, для описания изотропного сопротивления неупругому течению материала используется единственная внутренняя скалярная переменная "s", называемая деформационным сопротивлением. Наличие этих особенностей находит отражение в определяющих уравнениях модели; одно из них записывается в виде уравнение течения:
|
|
|
Q |
|
|
|
1 |
|
|
|
− |
|
|
|
σ |
|
|
|
p |
|
m |
|||||
d |
RQ |
ξ |
||||||
|
= Ae |
sinh |
|
|||||
|
|
|
|
|
|
|
s |
|
другое – как уравнение, описывающее изменение с течением времени деформационного сопротивления:
|
|
|
|
|
|
B |
|
|
|
s = h0 |
( |
B |
)a |
|
|
|
|
d p |
|
|
|
B |
|
|
|||||
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Последнее уравнение позволяет моделировать не только упрочнение материала, но и снижение сопротивления с ростом деформаций:
B =1− ss*
s* = s |
d p |
e |
Q |
n |
||
Rθ |
||||||
|
|
|
||||
ˆ |
A |
|
|
|||
|
|
|
|
|
||
dp – эффективный коэффициент неупругой деформации (effective inelastic deformation rate); σ – эффективное напряжение Коши;
s – деформационное сопротивление (deformation resistance);
s* – порог насыщения (saturation value) деформационного сопротивления; θ – абсолютная температура.
4.3.9.4 Нелинейная упругость
ПК ANSYS предусматривает возможность моделировать материалы с нелинейными (полилинейными) упругими свойствами. В таких случаях в отличие от пластического поведения материала энергия деформирования сохраняется (процесс консервативен).
Учет такого поведения материала выполняется с помощью команды TBPT с опцией TB,MELAS для соответствующих конечных элементов. На Рис. 4.8 показаны основные черты нелинейноупругого поведения материала. Следует обратить внимание на то, что
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
43 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
материал разгружается по кривой нагружения, при этом остаточные неупругие деформации не возникают.
Рис. 4.8 Кривая “напряжение-деформация” для нелинейной упругости
Величина общей деформации {εn} используется для вычисления суммарной эквивалентной деформации:
|
|
1 |
|
(εx −εy )2 |
+ (εy −εz )2 + (εz |
|
3 |
(εxy )2 |
|
3 |
(εyz )2 |
|
|
3 |
1 |
|
|
εet = |
|
|
−εx )2 + |
+ |
+ |
(εxz )2 |
2 |
|
|||||||||
|
|
|
2 |
2 |
2 |
||||||||||||
2 |
(1+ν ) |
|
|
|
|
|
|
|
|||||||||
Значение εet |
используется для получения с помощью кривой “σ - |
ε” эквивалентных |
|||||||||||||||
напряжений σе.
Упругая (линейная) составляющая деформации может быть вычислена с помощью соотношения:
{εnel }= Eσεeet {εn }
поэтому “пластическая” или нелинейная часть деформации:
{εnpl }= {εn }−{εnel }
Чтобы избежать образования несимметричной матрицы, используется только симметричная часть матрицы касательной жесткости для соотношений “напряжениедеформация”:
[Dep ]= |
σe |
[D] |
|
||
|
Eεe |
|
которая представляет собой матрицу секущей жесткости для кривой “σ – ε”.
4.3.9.5 Гиперупругость
Гиперупругость характеризует поведение материалов, которые могут испытывать полностью обратимые конечные упругие деформации. К таким материалам относятся резины и многие другие полимерные материалы. Напряжения в них обычно являются
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
44 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
функцией плотности энергии деформирования. В ANSYS предусмотрены следующие варианты описания поведения гиперупругих материалов:
•Модель Нео-Хукина (Neo-Hookean);
•Модель Муни-Ривлина (Mooney-Rivlin);
•Полиномиальная форма (Poiynomial Form);
•Модель Огдена (Ogden Potential);
•Модель Арруда-Бойса (Arruda-Boyce);
•Модель Гента (Gent);
•Модель Йео (Yeoh);
•Модель Огдена для сжимаемых вспененных или им подобным материалов (Ogden Compressible Foam Model);
•Модель Блатц-Ко (Blatz-Ko Model).
Материал считается гиперупругим, если существует функция упругого потенциала W (или функция плотности энергии деформации), которая является скалярной функцией тензора деформации или тензора перемещения, производная которой по компонентам деформации определяет соответствующий компонент напряжения. Выражение может иметь вид:
Sij = ∂W = 2∂W
∂Eij ∂Cij
где:
Sij – компоненты второго тензора напряжений Пиолы – Кирхгофа (Piola-Kirchhoff); W – функция энергии деформации на единицу недеформированного объема;
Eij – компоненты тензора деформации Лагранжа;
Cij – компоненты правого тензора деформации Коши-Грина.
Деформации Лагранжа определяются следующим образом:
Eij = 0.5(Cij −δij )
где δij = 1.0 при i = j и δij = 0.0 при i ≠ j.
Тензор деформаций Cij определяется произведением градиентов деформации fij:
Cij = fik fkj
где:
fij = ∂Xi /∂xi;
Xi – недеформированное положение точки в направлении i;
xi = Xi + ui – деформированное положение точки в направлении i; ui – перемещение точки в направлении i.
Теория, используемая для семейства гиперупругих конечных элементов, применима только для изотропных материалов. При этом, однако, никаких ограничений на величину деформаций не накладывается, а результаты не зависят от пути нагружения.
В рамках настоящей верификации рассматриваются гиперупругие модели Муни-
Ривлина (Mooney-Rivlin) и Огдена (Ogden Potential).
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
45 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Определяющее соотношение Муни-Ривлина (Mooney-Rivlin) представляет собой разумную модель поведения для некоторых почти несжимаемых натуральных резиноподобных материалов. Функция плотности энергии деформаций для модели МуниРивлина с параметром 2 имеет следующее выражение:
W = c10 (I1 −3)+ c01 (I2 −3)+ d1 (J −1)2
где:
Ii – редуцированные инварианты деформации в i-ом направлении, заданные следующим
образом:
I1 = I1 I3-1/3
I2 = I2 I3-1/3 I3 = I31/2
с10, с01, d – константы материала;
Ii – инварианты правого тензора деформации Коши-Грина Cij:
I1 = Cii
I2 = Ѕ (I12 - Cij Cij)
I3 = det Cij – коэффициент изменения объема.
Для модели Муни-Ривлина с 5-ю параметрами функция плотности энергии деформации вычисляется:
W = c10 (I1 −3)+ c01 (I2 −3)+ c20 (I1 −3)2 + c11 (I1 −3)(I2 −3)+ c02 (I1 −3)2 + d1 (J −1)2
где с10, с01, с20, с02, d – константы материала.
Для модели Муни-Ривлина с 9 параметрами функция плотности энергии деформации вычисляется:
W = c10 (I1 −3)+ c01 (I2 −3)+ c20 (I1 −3)2
+ c11 (I1 −3)(I2 −3)+ c02 (I1 −3)2 + c30 (I1 −3)3
+ c21 (I1 −3)2 (I2 −3)+ c12 (I1 −3)(I2 −3)2 + c03 (I2 −3)3 + d1 (J −1)2
где с10, с01, с20, с02, с03, с30, с11, с12, с21, d – константы материала.
Заметим, что для малых деформаций выражение 2(с10 + с01) представляет собой модуль сдвига, а выражение 6(с10 + с01) – модуль Юнга.
Начальный модуль объемной деформации K (bulk modul) определяется выражением:
|
|
|
|
|
K = |
2 |
|
|
|
|
|
d |
|
||||||||
|
|
|
|
|
|
|
|
|||
Определяющее соотношение гиперупругой модели Огдена (Ogden Potential) с |
||||||||||
функцией энергии деформации: |
(λ1αi + λ2αi + λ3αi −3) + ∑ 1 |
(J −1)2k |
||||||||
W = ∑µi |
||||||||||
N |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 αi |
|
|
|
|
|
|
|
k =1 dk |
|
|
где:
µn, αn, dk – константы материала; J – третий инвариант тензора деформаций.
В силу трудоёмкости вычисления констант материала значение N не рекомендуется задавать больше 3.
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
46 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Начальный модуль сдвига µ определяется выражением:
µ = 1 ∑N αi µi
2 i=1
Начальный модуль объемной деформации K (bulk modul) определяется выражением:
K = 2 d1
4.3.9.6 Моделирование бетона
Модель популярного строительного материала – бетона – прогнозирует разрушение хрупких материалов. Учитываются как механизмы трещинообразования, так и разрушения при дроблении. Команда TB,CONCR позволяет использовать эту модель материала, которая применяется вместе с конечным элементом железобетона SOLID65.
Критерий разрушения бетона при сложном напряженном состоянии может быть выражен следующим образом:
F − S ≥ 0 fc
где:
F – функция состояния главных напряжений (σxp, σyp, σzp);
S – поверхность разрушения, выраженная в компонентах главных напряжений и пятью
параметрами ft, fc, fcb, f1 и f2;
fc – предельная прочность при одноосном сжатии;
ft – предельная прочность при одноосном растяжении; fcb – предельная прочность при двухосном растяжении;
f1 – предельная прочность при двухосном сжатии, наложенном на гидростатическое напряжение σha;
f2 – предельная прочность при одноосном сжатии, наложенном на гидростатическое напряжение σha;
σha – среднее (гидростатическое) напряжение;
σxp, σyp, σzp – главные напряжения для главных направлений.
Если условие критерия разрушения не выполняется, то растрескивания, раздробления не происходит. И наоборот, материал будет растрескиваться, если любое из главных напряжений является растягивающим, и будет раздавливаться, если все главные напряжения оказываются сжимающими.
Для задания поверхности разрушения и определения величины среднего (гидростатического) напряжения требуется введение пяти параметров (каждый из которых может зависеть от температуры), представленных выше.
Между тем, поверхность разрушения может быть задана с использованием двух констант ft и fc. Другие три константы задаются по умолчанию [37]:
fcb = 1,2 fc; f1 = 1,45 fc; f2 = 1,725 fc.
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
47 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Однако эти значения по умолчанию имеют силу только для напряженного состояния, когда выполняется условие:
σh ≤ 3 fc
σh = 13 (σxp +σyp +σzp ) – среднее, или гидростатическое, напряжение.
Таким образом, это условие используется в тех случаях, когда компоненты гидростатического напряжения достаточно малы. Все пять параметров разрушения задаются в ситуации, когда предполагаются большие значения составляющих гидростатического напряжения. Если оно не выполняется и принимаются значения параметров по умолчанию согласно выше обозначенным соотношениям, оценка прочности бетона может оказаться ошибочной.
Как функция F, так и поверхность разрушения S выражаются в компонентах главных напряжений, обозначенных σ1, σ2, σ3, при этом главные напряжения удовлетворяют условиям:
σ1 = max (σxp , σyp , σzp), σ3 = min (σxp , σyp , σzp),
и σ1 ≥ σ2 ≥ σ3.
Разрушение бетона может произойти в следующих четырех случаях:
•0 ≥ σ1 ≥ σ2 ≥ σ3 (сжатие-сжатие-сжатие);
•σ1 ≥ 0 ≥ σ2 ≥ σ3 (растяжение-сжатие-сжатие);
•σ1 ≥ σ2 ≥ 0 ≥ σ3 (растяжение-растяжение-сжатие);
•σ1 ≥ σ2 ≥ σ3 ≥ 0 (растяжение-растяжение-растяжение).
В каждой такой области для описания поверхностей F и S используются независимые функции. Четыре функции, составляющие общую поверхность F, обозначаются F1, F2, F3 и F4; функции, составляющие общую поверхность S, обозначаются S1, S2, S3 и S4. Функциям Si (i = 1,4) присуще свойство, в соответствии с которым представляемая ими поверхность является непрерывной, при этом градиент поверхности не остается непрерывным, если любое главное напряжение меняет знак. Для каждого из четырех случаев критерий разрушения и поверхность разрушения подробно обсуждаются в [16].
4.3.10Нелинейные статические и динамические задачи
Конечноэлементная дискретизация дает следующую нелинейную систему уравнений:
|
[K ]{u}= {F a } |
(99) |
где: |
|
|
[K ] |
– матрица коэффициентов, зависящих от неизвестных |
степеней свободы или их |
производных;
{u} – вектор неизвестных степеней свободы; {F a }– вектор приложенных нагрузок.
Методом решения нелинейных уравнений является итерационный метод НьютонаРафсона и его варианты (модификации).
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
48 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
4.3.10.1 Метод Ньютона-Рафсона
Метод Ньютона-Рафсона описывается соотношениями:
[Ki ]T {∆ui }= {F a }−{Fi nr } |
(100) |
{ui+1}= {ui }+{∆ui } |
(101) |
– матрица Якоби (тангенциальная); i – номер текущей итерации;
{Fi nr } – вектор восстанавливающей нагрузки, соответствующий элементной инерционной нагрузке.
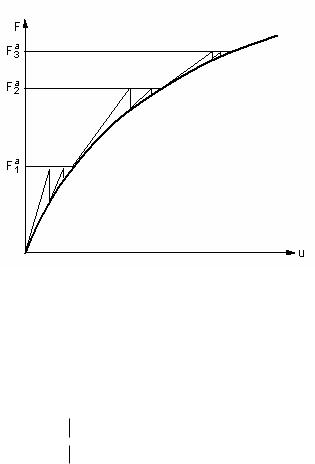
Рис. 4.9 иллюстрируют определение значений матрицы [Ki ]T и вектора {Fi nr }.
Рис. 4.9 Геометрическая интерпретация метода Ньютона-Рафсона
Для задач с учетом нелинейности, зависящей от “пути” нагружения (например, пластичности), требуется нагрузку {F a }задавать пошагово (Рис. 4.10):
[Kn,i ]T {∆ui }= {Fn a }−{Fn,i nr } |
(102) |
где:
[Kn,i ]T –тангенциальная (касательная ) матрица для n-го шага по времени и i-ой итерации; {Fn a }– полный вектор приложенной нагрузки на n-ом шаге по времени;
{Fn,i nr } – вектор восстанавливающей нагрузки, соответствующий элементной инерционной нагрузке на n-ом шаге по времени и i-ой итерации.
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
49 |
vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Рис. 4.10 Геометрическая интерпретация шагового (инкрементного) метода Ньютона-Рафсона
Когда матрица жесткости обновляется на каждой итерации, тогда речь идет о полном методе Ньютона-Рафсона. Альтернативными являются модифицированный метод и схема с начальной жесткостью.
Сходимость достигается при условии:
|
{R} |
|
|
|
< εR Rref |
(103) |
||||
|
|
|
||||||||
|
{∆u |
|
|
|
i } |
|
|
|
< εu uref |
(104) |
|
|
|
|
|
|
|||||
где:
{R}= {F a }−{F nr }
4.3.10.2 Метод окаймляющих дуг (arc-length method)
Метод окаймляющих дуг применим для решения задач статики (нелинейная потеря устойчивости) с большой геометрической нелинейностью, включая учет закритического поведения [173]. Метод Ньютона-Рафсона является основой для метода окаймляющих дуг. Уравнение (100) запишем иным образом:
[Ki ]T {∆ui }= λ{F a }{Fi nr } |
(105) |
где: |
|
λ – фактор полной нагрузки, находящийся в диапазоне от -1,0 до 1,0. |
|
Для n-го шага по времени и i-й итерации запишем соотношение: |
|
[Ki ]T {∆ui }− ∆λ{F a }= (λn + λi ){F a }−{Fi nr }= −{Ri } |
(106) |
где:
∆λ – приращение фактора нагрузки (Рис. 4.11)
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
50 |

vk.com/club152685050ANSYS Mechanical. Верификационный| vk.com/id446425943отчет. Том 1
Рис. 4.11 Геометрическая интерпретация метода окаймляющих дуг совместно с методом Ньютона-Рафсона
Приращения перемещений {∆ui } могут быть выражены:
{∆ui }= ∆λ{∆uiI }+ {∆uiII } |
(107) |
где:
{∆ui I }= [KiT ]−1 {F a }– перемещения от единичного фактора нагрузки;
{∆ui II }= −[KiT ]−1{Ri } – приращения перемещений для метода Ньютона-Рафсона.
На каждой итерации необходимо вычислять {∆uiI } и |
{∆uiII }. Приращение фактора |
нагрузки определяется из уравнения окаймляющих дуг: |
|
2i = λi2 + β 2 {∆un }T {∆un } |
108) |
где:
β – коэффициент масштабирования (в единицах перемещений); ∆un – сумма всех приращений ∆ui на данной итерации.
Радиус окаймления на i-ой итерации должен быть таким же, каким и на 1-ой: |
|
||
i |
= i−1 =…= |
1 |
(109) |
Уравнения (107) и (108) |
однозначно |
определяют вектор (∆ui , ∆λ)T . |
Однако, |
существует много методов аппроксимации ∆λ . В явном виде сферический итерационный метод используется для обеспечения ортогональности [173]. Сначала вычисляется необходимый остаточный радиус ri для явной итерации на сфере. Затем, определяется ∆λ
по формуле:
∆λ = |
ri −{∆un }T {∆uiII } |
} |
(110) |
β 2λi +{∆un }T {∆uiI |
ЗАО НИЦ СтаДиО (www.stadyo.ru stadyo@stadyo.ru), МГСУ (niccm@mgsu.ru), 2009 |
51 |