

2.2.3 Погрешность метода Гаусса. Метод Гаусса с выбором главного элемента
Основные
вычисления в методе исключений Гаусса
выполняются по формулам (2.7) – (2.9). Граф
процесса вычисления коэффициентов
![]() по формуле (2.8) представлен на рисунке
2.1. Этот граф позволяет проследить
накопление погрешностей в процессе
вычислений по методу Гаусса.
по формуле (2.8) представлен на рисунке
2.1. Этот граф позволяет проследить
накопление погрешностей в процессе
вычислений по методу Гаусса.
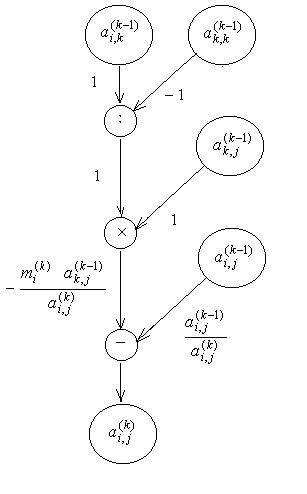
Рисунок 2.1 – Граф процесса вычисления коэффициента
Обозначим
![]() относительную погрешность, содержащуюся
в коэффициенте
относительную погрешность, содержащуюся
в коэффициенте
![]() ,
,
![]() – относительные погрешности округления
соответственно при делении, умножении
и вычитании. Тогда для относительной
погрешности
– относительные погрешности округления
соответственно при делении, умножении
и вычитании. Тогда для относительной
погрешности
![]() коэффициента
коэффициента
![]() можно получить выражение
можно получить выражение
 .
.
Отсюда
получаем формулу для оценки абсолютной
погрешности
![]() :
:
![]()
![]() .
.
Если
предположить, что погрешности
,
не превышают некоторой величины
![]() ,
то получим следующую формулу для оценки
погрешности:
,
то получим следующую формулу для оценки
погрешности:
![]() .
.
Из
последнего выражения видно, что
погрешность вычисления коэффициента
в основном определяется первым слагаемым
правой части и уменьшается с уменьшением
![]() .
Чтобы
было по возможности меньшим, необходимо
чтобы
.
Чтобы
было по возможности меньшим, необходимо
чтобы
![]() было по возможности большим (см. формулу
(2.7)). Поэтому перед выполнением шага
исключения каждой переменной желательно
переставить уравнения системы так,
чтобы
было по возможности большим (см. формулу
(2.7)). Поэтому перед выполнением шага
исключения каждой переменной желательно
переставить уравнения системы так,
чтобы
![]() ,
,
![]() ,
,
потому что тогда
![]() .
.
Если в методе Гаусса выполняется такая перестановка, то метод называется методом Гаусса с выбором главного элемента. Этот метод имеет меньшую погрешность при определении решения СЛАУ.
2.4 Обращение матрицы
Как
известно, матрица
![]() называется обратной матрице
называется обратной матрице
![]() ,
если выполняется соотношение
,
если выполняется соотношение
![]() ,
(2.10)
,
(2.10)
где
![]() – единичная матрица. Обозначим
– единичная матрица. Обозначим
![]() ,
,
![]() ,
,
![]() ,
где
,
где
![]() – символ Кронекера,
– символ Кронекера,
![]()
Тогда соотношение (2.10) можно записать так:
![]() ,
.
(2.11)
,
.
(2.11)
Из
этого выражения видно, что если
рассматривать
![]() -й
столбец
-й
столбец
![]() обратной матрицы как вектор, то он
является решением системы линейных
алгебраических уравнений (2.11) с матрицей
и вектором правой части, все элементы
которого равны нулю, кроме
-го,
который равен 1. Таким образом, элементы
обратной матрицы могут быть получены
решением системы линейных алгебраических
уравнений. Для обращения матрицы
необходимо решить
систем линейных уравнений с одинаковой
матрицей
и разными правыми частями. Приведение
матрицы
к треугольному виду по формулам (2.8),
(2.9) делается при этом только один раз.
В дальнейшем необходимо формировать
новую правую часть, преобразовывать ее
при помощи чисел (2.7)
обратной матрицы как вектор, то он
является решением системы линейных
алгебраических уравнений (2.11) с матрицей
и вектором правой части, все элементы
которого равны нулю, кроме
-го,
который равен 1. Таким образом, элементы
обратной матрицы могут быть получены
решением системы линейных алгебраических
уравнений. Для обращения матрицы
необходимо решить
систем линейных уравнений с одинаковой
матрицей
и разными правыми частями. Приведение
матрицы
к треугольному виду по формулам (2.8),
(2.9) делается при этом только один раз.
В дальнейшем необходимо формировать
новую правую часть, преобразовывать ее
при помощи чисел (2.7)
![]() по формуле (2.9) и для каждой правой части
выполнять обратный ход. Понятно, что
преобразующие числа
,
по формуле (2.9) и для каждой правой части
выполнять обратный ход. Понятно, что
преобразующие числа
,
![]() ,
необходимо сохранять по мере их получения
на этапе прямого хода. Видно, что эти
числа образуют нижнюю треугольную
матрицу, совпадающую по размерам с
матрицей исключаемых коэффициентов
системы. Поэтому число
можно поместить на место элемента
,
необходимо сохранять по мере их получения
на этапе прямого хода. Видно, что эти
числа образуют нижнюю треугольную
матрицу, совпадающую по размерам с
матрицей исключаемых коэффициентов
системы. Поэтому число
можно поместить на место элемента
![]() .
.
Для
обращения матрицы этим методом требуется
примерно
![]() ячеек оперативной памяти и примерно
ячеек оперативной памяти и примерно
![]() арифметических операций.
арифметических операций.
Описанный прием вычислений можно применить при решении систем уравнений с одной и той же матрицей и различными правыми частями. В этом случае выгодно привести матрицу к треугольному виду только однажды, используя сохраненные числа во всех последующих вычислениях.