

6 Розрахунки на еом
6.1 За результатами лабораторних дослідів здійснити розрахунки механічних характеристик дослідного двигуна на ЕОМ за розрахунковими формулами в системі MATH-CAD.
6.2 Ввести результати досліджень з таблиці 1.1:
кількість дослідів (різних кутів );
кількість точок в кожному досліді;
струм в якірному колі для кожної точки, А;
напруга на якорі для кожної точки, В;
швидкість обертання, об/хв.;
значення струму (змінна напруга), А;
значення змінної напруги, В;
значення потужності, Вт.
втрати неробочого ходу, Вт.
6.3 Результати занести в таблицю 1.1.
6.4 За результатами розрахунків побудувати механічні характеристики дослідного двигуна в одних координатах для різних кутів відкриття тиристора .
7 ЗМІСТ ЗВІТУ
У звіті необхідно подати:
7.1 Схему експериментальної установки.
7.2 Паспортні дані машин і приладів.
7.3 Таблиці з експериментальними і розрахунковими даними.
7.4 Графіки експериментально знятих і розрахованих
характеристик. Характеристики побудувати на міліметровому папері.
8 Контрольні запитання
8.1 Поясніть принцип дії тиристорного перетворювача.
8.2 Яким чином досягається жорсткість механічних характеристик двигуна тиристорного електроприводу?
8.3 Чим регулюється середня випрямлена напруга в ТП?
8.4 В якому діапазоні можна змінювати кут відкриття тиристора?
8.5 Поясніть призначення елементів схеми рис.1.2
Лабораторна робота № 2 дослідження механічних характеристик асинхронного двигуна з фазним ротором
Мета роботи: Дослідження механічних характеристик асинхронного двигуна з фазним ротором в робочому і гальмівних режимах.
1 Основні теоретичні положення
Механічна характеристика асинхронного двигуна (АД) являє собою залежність ω=f(М) або М=f(S) зміни швидкості обертання ротора від величини моменту М на валу (або моменту на валу від ковзання). Момент двигуна, виражений через параметри схеми заміщення і ковзання, визначається за формулою
 ,
(2.1)
,
(2.1)
де m1 – число фаз статора; Uф – фазна напруга статора; S – ковзання ротора:
 ,
(2.2)
,
(2.2)
де ω0 – швидкість магнітного поля статора (синхронна швидкість), об/хв;
 ,
об/хв, (2.3)
,
об/хв, (2.3)
де f1 – частота струму мережі живлення, Гц; p – число пар полюсів; ω1 – швидкість обертання ротора, об/хв;
r1 і х1 – активний і індуктивний опори обмоток статора, Ом;
r2′ і х2′ – активний і індуктивний опори ротора, зведені до обмотки статора, Ом.
Найбільшу жорсткість має природна механічна характеристика АД. При введенні додаткового опору в коло ротора жорсткість механічної характеристики зменшується, тому робота АД при великому RД в колі ротора небажана.
Для практичних розрахунків механічної характеристики широко використовується спрощене рівняння механічної характеристики (рівняння Клосса)
 ,
(2.4)
,
(2.4)
де МКР – критичний момент двигуна, Нм;
МКР=λМНОМ,
де λ – коефіцієнт перевантаження; МНОМ – номінальний момент, Нм.
Критичне ковзання визначається за формулою:
![]() ,
(2.5)
,
(2.5)
де SHOM – номінальне ковзання.
Номінальний момент може бути визначений за паспортними даними електродвигуна:
 ,
кГм, (2.6)
,
кГм, (2.6)
де РНОМ – номінальна потужність електродвигуна, кВт; ωНОМ – номінальна швидкість ротора, об/хв.
При введенні в кожну фазу кола ротора активного опору RRД величина критичного ковзання SКР зростає, а критичний момент не змінюється.
Розрізняють природну та штучні механічні характеристики.
Природна механічна характеристика – це характеристика, яку має двигун при номінальних параметрах мережі живлення і відсутності додаткового опору RRд в колі ротора.
Штучні механічні характеристики – це характеристики, які має двигун при параметрах, які відрізняються від номінальних і введенні в коло ротора додаткового опору RRД.
Механічні характеристики АД в різних режимах його роботи приведені на рис. 2.1.

Рисунок. 2.1 – Механічні характеристики асинхронного двигуна в різних режимах роботи
Існують різні режими роботи електродвигунів-робочий і гальмівні. Гальмівні режими наступні: генераторне гальмування, гальмування противмиканням і електродинамічне гальмування.
Генераторне гальмування з віддачею енергії в мережу можливе тільки при обертанні ротора електродвигуна з швидкістю, вищою за синхронну. Цей спосіб має місце тоді, коли ротор електродвигуна під впливом зовнішнього зусилля починає обертатися з швидкістю, вищою за синхронну.
На рис. 2.1 показані характеристики для гальмівного режиму з віддачею електроенергії в мережу (квадрант ІІ).
Аналіз гальмівних характеристик цього режиму показує, що введення активного опору в ланцюг ротора призводить до зростання швидкості обертання ротора, тому швидкість генераторного гальмування, як правило, обмежена.
За допомогою цього режиму гальмування неможливо зупинити двигун до нуля. Можливо лише знизити швидкість до синхронної ω0.
Гальмування противмиканням полягає в тому, що асинхронний електродвигун включається на обертання протилежне тому, яке в даний момент має ротор, (за рахунок зміни фаз обмотки статора).
Гальмівний момент МГ, що створюється, знижує швидкість ротора двигуна, і, коли вона спаде до нуля (точка К) двигун повинен бути відключений від мережі, оскільки в іншому випадку він починає обертатися в протилежний бік, переходячи в режим із зворотним напрямом обертання (режим реверсу, рис 2.2). Цей режим гальмування застосовується і тоді, коли опускається вантаж на малій швидкості при включеному двигуні “на спуск” і коли в коло ротора вводиться великий опір. При цьому момент двигуна М стає меншим за М0 вантажу і двигун зупиняється в точці З, потім змінює напрям, коли врівноважуються (М=М0), вантаж опускається з малою швидкістю (точка Н, рис. 2.2).
Електродинамічне гальмування асинхронних машин має місце, коли обмотки статора вимикаються з трифазної мережі і під’єднюються до джерела постійного струму за однією із схем (рисунок. 2.3).
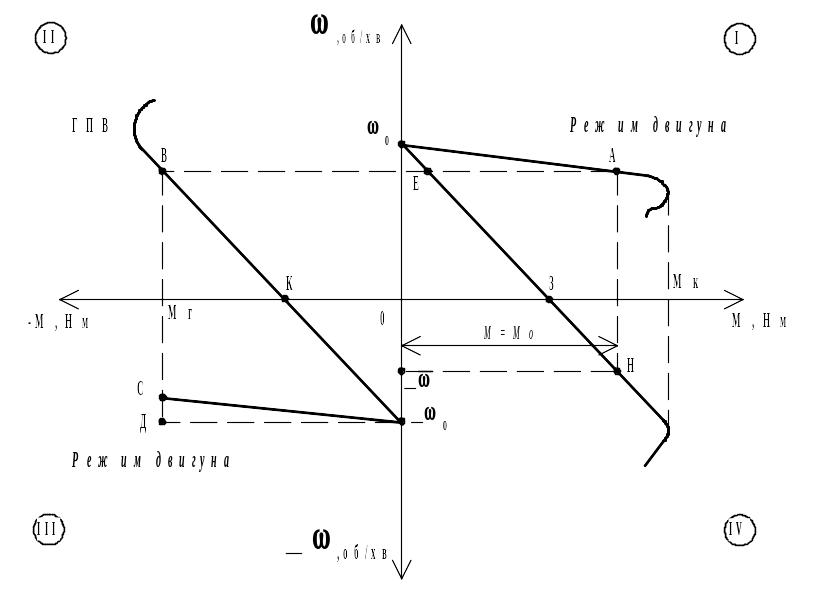
Рисунок. 2.2. - Механічні характеристики асинхронного двигуна в режимі гальмування противмиканням і двигунному режимі реверсу

Рисунок 2.3 – Схеми з’єднань обмоток статора при електродинамічному гальмуванні асинхронного двигуна
При цьому в коло ротора введений активний опір . Внаслідок цього в обмотці статора утворюється нерухоме магнітне поле, яке збуджує в обмотках ротора, що обертається за інерцією, ЕРС постійного струму. Машина перетворюється в синхронний генератор з нерухомими магнітними полюсами. Взаємодія магнітного поля зі струмами в обмотках ротора утворює гальмівний момент, величина якого залежить від намагнічувального струму Ін (рис. 2.3), а також від величини активного опору ротора та швидкості.
Механічні характеристики при електродинамічному гальмуванні подані на рисунку 2.1 (квадрант ІІ).