

9.2. Способы задания движения
Прежде всего определим, что значит задать движение.
Движение точки по отношению к избранной системе отсчета считается заданным, если известен способ, при помощи которого можно определить положение точки в любой момент времени. Следовательно, задать движение точки это значит указать способ, позволяющий в любой момент времени определить ее положение по отношению к выбранной системе отсчета.
Векторный способ.
Положение
точки в пространстве будет вполне
определено, если ее радиус-вектор
![]() ,
проводимый из какого-либо заданного
центра, известен как функция времени,
т.е.
,
проводимый из какого-либо заданного
центра, известен как функция времени,
т.е.
![]() .
Следует, однако, иметь в виду, что задать
вектор как функцию времени значит уметь
находить его модуль и направление в
любой момент времени. Это можно сделать,
если избрана какая-либо определенная
система, т.е. задание радиуса-вектора
как функции времени обязательно
предполагает наличие системы координат,
но в то же время не конкретизирует ее.
Считая, что радиус-вектор задан, мы тем
самым должны предполагать, что умеем
определять его модуль и направление в
избранной нами системе координат.
.
Следует, однако, иметь в виду, что задать
вектор как функцию времени значит уметь
находить его модуль и направление в
любой момент времени. Это можно сделать,
если избрана какая-либо определенная
система, т.е. задание радиуса-вектора
как функции времени обязательно
предполагает наличие системы координат,
но в то же время не конкретизирует ее.
Считая, что радиус-вектор задан, мы тем
самым должны предполагать, что умеем
определять его модуль и направление в
избранной нами системе координат.
То обстоятельство, что введением радиуса-вектора, определяющего положение точки, мы не связываем себя с конкретной системой координат, позволяет широко использовать задание радиуса-вектора как функции времени для получения основных кинематических характеристик движения. Для решения же конкретных задач обычно переходят от векторного способа к координатному и естественному способам задания движения.
Введем еще одно полезное для дальнейшего понятие о годографе вектора, рассматриваемого как функция скалярного аргумента (например, времени).
Годографом какого-либо вектора называют кривую, которую вычерчивает конец этого вектора (предполагается, что начало вектора находится все время в одной и той же точке) при изменении его аргумента.
Следовательно, годографом радиуса-вектора, определяющего положение точки буде траектория точки.
Перейдем теперь к рассмотрению координатного и естественного способов задания движения.
Координатный способ. Положение точки по отношению к какой-либо системе координат полностью определяется координатами точки. Поэтому задание координат точки в виде известных функций времени дает возможность определить ее положение в любой момент времени. Способ задания движения, заключающийся в задании координат точки как известных функций времени, называется координатным способом задания движения и требует выбора конкретной системы координат. Этот выбор определяется содержанием решаемой задачи; предпочтительнее та система координат, использование которой наиболее целесообразно для данной задачи.
При рассмотрении
движения в прямоугольной
декартовой системе
координат
указанный способ заключается в задании
координат
![]() ,
,
![]() ,
,
![]() точки
точки
![]() как известных функций времени, т.е.
как известных функций времени, т.е.
![]() ,
,
![]() ,
,
![]() .
(9.1)
.
(9.1)
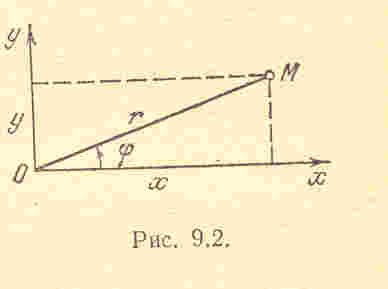
Во многих случаях бывает предпочтительнее использовать цилиндрические или сферические координаты.
В цилиндрических
координатах положение точки определяется
радиусом
![]() ,
углом
,
углом
![]() (азимут) и аппликатой
.
(азимут) и аппликатой
.

Следовательно, движение будет задано, если , и будут известными функциями времени
![]() ,
,
![]() ,
.
(9.2)
,
.
(9.2)
В сферических
координатах
положение точки определяется полярным
радиусом
![]() ,
углом
и углом
,
углом
и углом
![]() (полюсный угол). Следовательно, движение
будет задано, если
(полюсный угол). Следовательно, движение
будет задано, если
![]() ,
,
,
,
![]() (9.3) – известные функции времени.
(9.3) – известные функции времени.
Формулы, связывающие цилиндрические и сферические координаты с декартовыми, соответственно будут
![]() ,
,
![]() ,
,
![]() ;
;
![]() ,
,
![]() ,
,
![]() ,
,
При движении точки в плоскости иногда целесообразно использовать полярные координаты. В этом случае нужно задать в виде функций времени координаты и :
, .
Связь этих координат с декартовыми дается формулами
![]()
 ,
,
![]() .
.
Уравнения (9.1) движения точки представляют одновременно траектории в параметрической форме, где роль параметра играет время . Если требуется определить уравнение траектории в координатной форме, то требуется исключить каким-либо образом из этих уравнений время .
Задача 9.1. Движение точки в плоскости
![]() задано при помощи уравнений
задано при помощи уравнений
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() ,
(9.4)
и движение начинается в момент времени
,
(9.4)
и движение начинается в момент времени
![]() .
Найти уравнение траектории в координатной
форме.
.
Найти уравнение траектории в координатной
форме.
Решение. Из первого уравнения
следует, что
![]() ,
поэтому уравнение траектории будет
,
поэтому уравнение траектории будет
![]() .
.
Э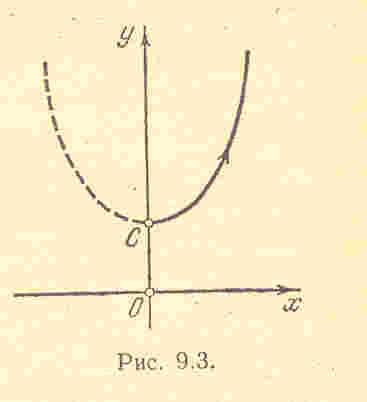 то
– уравнение параболы. Однако траекторией
будет не вся парабола, а только часть
ее. Это следует из того обстоятельства,
что от начального момента движения
(когда
то
– уравнение параболы. Однако траекторией
будет не вся парабола, а только часть
ее. Это следует из того обстоятельства,
что от начального момента движения
(когда
![]() ,
,
![]() )
координата
будет увеличиваться (время
положительно и непременно возрастает).
Направление движения точки по траектории
определяется из уравнений (9.4) и показано
на рис. стрелкой.
)
координата
будет увеличиваться (время
положительно и непременно возрастает).
Направление движения точки по траектории
определяется из уравнений (9.4) и показано
на рис. стрелкой.
В рассмотренном примере исключение времени из уравнения для и подстановки в уравнение для . Такой прием не всегда удобен, поэтому исключение времени можно производить и другими способами.
Задача 9.2. Движение точки в плоскости задано уравнениями
![]() ,
,
![]() .
(9.5) Найти уравнение
траектории в координатной форме.
.
(9.5) Найти уравнение
траектории в координатной форме.
Решение. Уравнения
![]() и
и
![]()
следует возвести в квадрат и сложить. Тогда получим уравнение траектории
![]() .
.
Она представляет собой эллипс. Из
уравнений (9.5) следует, что движение
начнется в точке А с координатами
![]() ,
,
![]() и будет происходить в направлении,
указанном стрелкой (предполагается,
что движение начинается в момент времени
).
и будет происходить в направлении,
указанном стрелкой (предполагается,
что движение начинается в момент времени
).
Естественный способ. При естественном способе задания движения указывают траекторию точки и закон ее движения по этой траектории.
Пусть точка движется по отношению к выбранной системе отсчета по заданной траектории, определяемой уравнениями
![]() (9.6)
(9.6)
Пусть
![]() – какая-либо точка на траектории. Выбрав
направление положительного отсчета
дуги по траектории,
– какая-либо точка на траектории. Выбрав
направление положительного отсчета
дуги по траектории,

мы определим
положение точки
в любой момент времени, если будем знать,
как изменяется дуга
![]() со временем
со временем
![]() .
(9.7) Эта зависимость
называется законом
движения.
.
(9.7) Эта зависимость
называется законом
движения.
Кривая, построенная
на плоскости
![]() ,
выражающая зависимость
,
выражающая зависимость
![]() ,
называется графиком
движения.
,
называется графиком
движения.
Если движение
происходит в сторону возрастания дуги
![]() ,
то дифференциал дуги
,
то дифференциал дуги
![]()
будет положительным,
если же движение происходит в сторону
убывания дуги, то дифференциал дуги
будет отрицательным. Отметим, что путь
![]() ,
проходимый точкой, всегда будет
возрастать, и всегда положителен
,
проходимый точкой, всегда будет
возрастать, и всегда положителен
![]() .
.
Задача 9.3. Закон движения точки по траектории имеет вид
![]()
( – в сек, – в м). Построить и исследовать график движения.
Решение. Графиком движения будет
кривая, изображенная на рис. Из рассмотрения
этого графика следует, что дуга
увеличивается до значения
![]() при
при
![]() ,
а затем начинает уменьшаться. Ход графика
движения в области отрицательных
характеризует увеличение абсолютного
значения дуги при движении точки от
начала отсчета
,
а затем начинает уменьшаться. Ход графика
движения в области отрицательных
характеризует увеличение абсолютного
значения дуги при движении точки от
начала отсчета
![]() в сторону, противоположную положительному
отсчету дуги.
в сторону, противоположную положительному
отсчету дуги.
На рис. показана и кривая
![]() ,
представляющая график функции
,
представляющая график функции
![]() ,
где
,
где
![]() – путь, пройденный точкой. До значения
кривая
совпадает с кривой
,
для
– путь, пройденный точкой. До значения
кривая
совпадает с кривой
,
для
![]() показана пунктиром.
показана пунктиром.

Все рассмотренные способы движения взаимосвязаны.
Пусть, например, движение задано координатным способом в виде (9.1). Очевидно, что при этом проекции радиуса-вектора на оси координат равны координатам точки и, следовательно, можно записать
![]() ,
(9.8) где
,
(9.8) где
![]() ,
и
,
и
![]() – единичные векторы осей х,
у,
z.
– единичные векторы осей х,
у,
z.
Модуль найдется по формуле
![]() ,
(9.9) а направление определится
направляющими косинусами
,
(9.9) а направление определится
направляющими косинусами
![]() ,
,
![]() ,
,
![]() .
(9.10)
.
(9.10)
Рассмотрим еще переход от координатного способа к естественному.
Пусть движение задано уравнениями (9.1). Исключая из этих уравнений время , получим уравнение траектории (9.6). Найдем теперь закон движения .
Дифференциал дуги может быть найден по формуле
![]() ,
,
г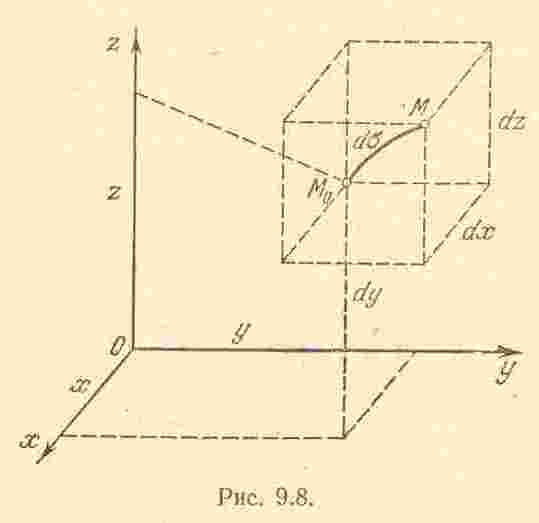 де
де
![]() ,
,
![]() ,
,
![]() – дифференциалы координат точки
– дифференциалы координат точки
![]() ,
,
![]() ,
,
![]() .
.
Формулу для
![]() можно переписать в виде
можно переписать в виде
![]() .
.
Интегрируя это
выражение в промежутке от
![]() (начало движения) до какого-либо момента
времени
,
получим закон движения
(начало движения) до какого-либо момента
времени
,
получим закон движения
![]() .
.
Знак "плюс" или "минус" перед интегралом ставится в зависимости от выбора направления положительного отсчета дуги; если движение точки начинается в сторону выбранного положительного отсчета дуги, то следует брать знак "плюс", в противном случае – знак "минус".