

9.3. Понятие о производной вектора по скалярному аргументу
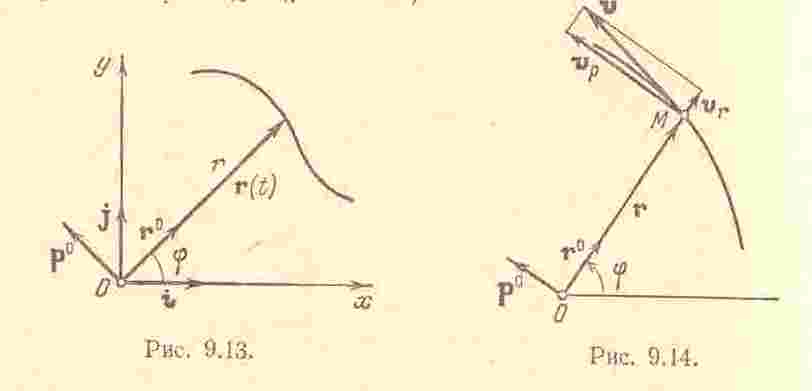
При рассмотрении задач кинематики и динамики мы встретимся с необходимостью вычисления производных векторов, имеющих различный физический смысл и являющихся функциями различных скалярных аргументов (времени, дуги и пр.). Поэтому в начале этого параграфа мы определим понятие производной вектора по скалярному аргументу в общем виде, не придавая конкретного физического значения вектору и аргументу.
Пусть вектор
![]() задан в какой-либо системе координат
как непрерывная функция скалярного
аргумента
задан в какой-либо системе координат
как непрерывная функция скалярного
аргумента
![]()
![]() .
.
П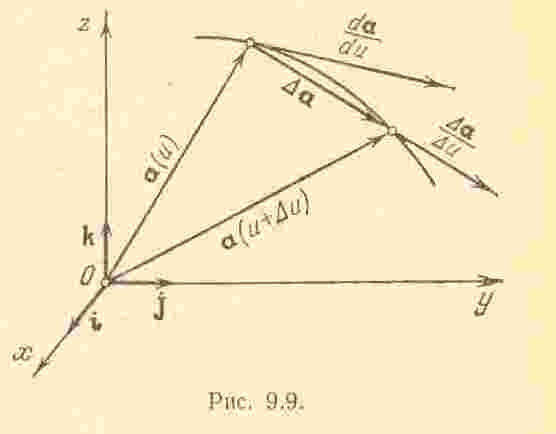 ри
изменении аргумента
будет меняться как модуль вектора
,
так и его направление. Конец вектора
при изменении аргумента
описывает кривую – годограф вектора
ри
изменении аргумента
будет меняться как модуль вектора
,
так и его направление. Конец вектора
при изменении аргумента
описывает кривую – годограф вектора
![]() .
Пусть
– некоторое фиксированное значение
аргумента, а
.
Пусть
– некоторое фиксированное значение
аргумента, а
![]() – его приращение. Тогда при значении
аргумента
– его приращение. Тогда при значении
аргумента
![]() вектор
будет иметь другой модуль и другое
направление, чем при значении аргумента,
равном
.
вектор
будет иметь другой модуль и другое
направление, чем при значении аргумента,
равном
.
Разность
![]()
называется приращением вектора .
Предел отношения
![]()
при
![]() ,
если он существует, называется производной
вектора по скалярному аргументу и
обозначается через
,
если он существует, называется производной
вектора по скалярному аргументу и
обозначается через
![]() ,
т.е.
,
т.е.
![]() .
.
Заметим, что вектор
![]() всегда направлен по секущей годографа
вектора
,
а значит, и вектор
всегда направлен по секущей годографа
вектора
,
а значит, и вектор
![]() направлен также по секущей. При
секущая займет предельное положение,
совпадающее с касательной к годографу
вектора
.
Следовательно, производная
вектора по скалярному аргументу всегда
направлена по касательной к годографу
этого вектора.
направлен также по секущей. При
секущая займет предельное положение,
совпадающее с касательной к годографу
вектора
.
Следовательно, производная
вектора по скалярному аргументу всегда
направлена по касательной к годографу
этого вектора.
Приведем без доказательства свойства производной вектора по скалярному аргументу:
Производная постоянного по величине и направлению вектора равна
нулю.
Производная суммы векторов равна сумме производных, т.е.
![]() .
.
Производные скалярного и векторного произведений векторов
соответственно определяются выражениями:
![]() ,
,
![]() .
.
Пусть вектор задан в неподвижной прямоугольной системе координат, тогда
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() – проекции вектора
на оси
– проекции вектора
на оси
![]() .
Так как векторы
.
Так как векторы
![]() постоянные, то
постоянные, то
![]() .
.
С другой стороны, вектор можно записать через его проекции следующим образом:
![]() .
.
Сравнивая оба выражения, найдем проекции производной вектора на координатные оси
![]() ,
,
![]() ,
,
![]() .
.
Эти равенства можно прочитать следующим образом: проекции производной вектора на неподвижные оси равны производным от соответствующих проекций вектора.
Модуль производной определяется из равенства
 .
.
Если модуль вектора
остается постоянным при изменении
аргумента
,
то годографом вектора
будет кривая, расположенная на сфере
радиуса
![]() .
Следовательно, производная
,
направленная по касательной к годографу
вектора
,
будет в этом случае перпендикулярна
вектору
.
.
Следовательно, производная
,
направленная по касательной к годографу
вектора
,
будет в этом случае перпендикулярна
вектору
.
9.4. Скорость точки
Перейдем теперь к определению понятия скорости точки и методам ее нахождения.
Пусть в момент
времени
положение точки определяется
радиусом-вектором
![]() ,
а в момент
,
а в момент
![]() – радиусом-вектором
– радиусом-вектором
![]() .
Вектор
.
Вектор
![]()
будем называть
вектором перемещения за время
![]() .
.
Отношение вектора
![]() к промежутку времени
называется средней
скоростью точки за промежуток времени
к промежутку времени
называется средней
скоростью точки за промежуток времени
![]() .
.
С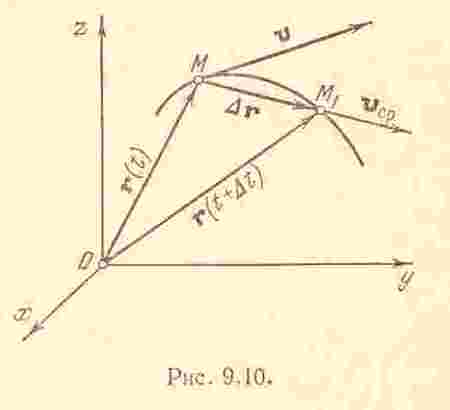 коростью
в данный момент времени называется
предел отношения сектора перемещения
точки к промежутку времени, за который
произошло это перемещение, когда этот
промежуток времени стремится к нулю,
т.е.
коростью
в данный момент времени называется
предел отношения сектора перемещения
точки к промежутку времени, за который
произошло это перемещение, когда этот
промежуток времени стремится к нулю,
т.е.
![]() .
.
Размерность скорости будет
![]() .
.
Единицами измерения
могут быть
![]() ,
,
![]() ,
,
![]() .
.
Из этого определения
видно, что скорость
точки равна произведению радиуса-вектора
точки по времени.
На рис. показаны средняя скорость
![]() и скорость
и скорость
![]() точки
.
Как следует из общей теории,
скорость
точки
– это
вектор, направленный по касательной к
траектории в сторону движения точки.
точки
.
Как следует из общей теории,
скорость
точки
– это
вектор, направленный по касательной к
траектории в сторону движения точки.
Скорость точки при координатном способе задания движения. Пусть движение точки задано в декартовой системе координат, принятой за неподвижную, т.е. пусть заданы координаты точки как функции времени
, , .
Согласно выражению (9.8) имеем
.
Так как единичные векторы выбранной системы координат постоянны, то на основании формулы (9.11) получаем
![]() .
.
На рис. показано
разложение скорости на составляющие
по осям координатной системы
![]() .
.
Таким образом,
проекции скорости
![]() ,
,
![]() ,
,
![]() на координатные оси будут
на координатные оси будут
![]() ,
,
![]() ,
,
![]() ,
,
т.е. проекция скорости точки на координатную ось равна первой производной по времени от соответствующей этой оси координаты.
Т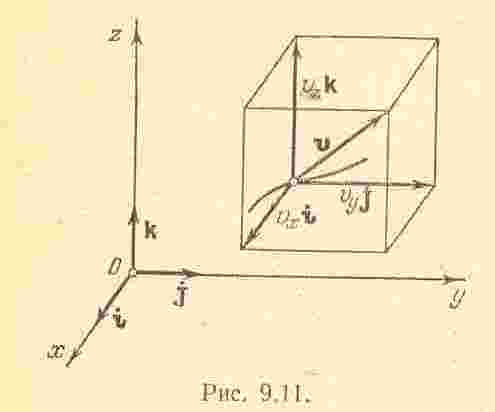 ак
как производную по времени мы условились
обозначать точкой сверху, то полученные
формулы можно переписать в виде
ак
как производную по времени мы условились
обозначать точкой сверху, то полученные
формулы можно переписать в виде
![]() ,
,
![]() ,
,
![]() .
(9.12)
.
(9.12)
Модуль скорости определяется формулой
![]() ,
(9.13)
а направление скорости – направляющими
косинусами
,
(9.13)
а направление скорости – направляющими
косинусами
 (9.14)
(9.14)
Если модуль скорости не изменяется с течением времени, то движение называется равномерным.
Задача 9.4. Движение точки задано уравнениями
,
![]() ,
,
![]() .
.
Найти скорость точки.
Решение. В соответствии с выражениями (9.12) получим проекции скорости
![]() ,
,
![]() ,
,
![]() .
.
Модуль скорости определяется формулой (9.13)
![]() .
.
Направление скорости найдем, используя формулы (9.14)

Из этих соотношений видно, что точка
движется равномерно
![]() ,
но направление скорости изменяется с
течением времени.
,
но направление скорости изменяется с
течением времени.
Исследуем траекторию точки. Из первых двух уравнений движения найдем
![]() .
.
Это – уравнение цилиндра радиуса , ось которого совпадает с осью .
О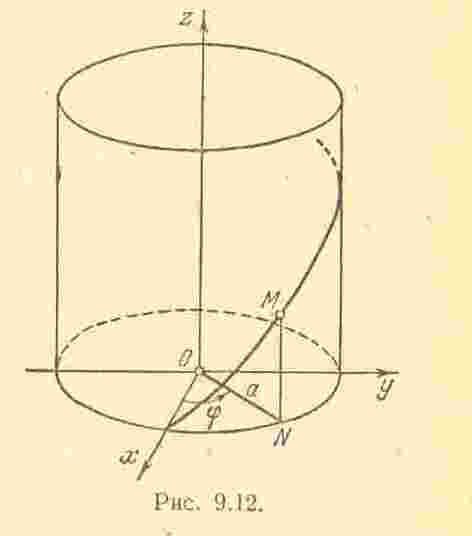 пустим
теперь из точки
на плоскость
перпендикуляр
пустим
теперь из точки
на плоскость
перпендикуляр
![]() и обозначим угол между осью
и прямой
и обозначим угол между осью
и прямой
![]() через
.
Координаты точки
через
.
Координаты точки
![]() будут
будут
![]() ,
,
![]() .
.
Сравнивая эти соотношения с уравнениями движения, найдем
![]() .
.
Таким образом, угол
изменяется пропорционально времени.
Из этого следует, что прямая
равномерно вращается, а точка
в это время равномерно перемещается по
образующей
![]()
![]() .
Следовательно, точка движется по винтовой
линии. Уравнения линии в параметрической
форме совпадают с уравнениями движения,
а в координатной форме имеют вид
.
Следовательно, точка движется по винтовой
линии. Уравнения линии в параметрической
форме совпадают с уравнениями движения,
а в координатной форме имеют вид
![]() ,
,
![]() .
.
Рассмотрим теперь движение, заданное в полярных координатах, т.е пусть даны как функции времени полярный радиус и угол , определяющие положение точки.
Введем в рассмотрение
единичные векторы:
![]() ,
направленный по радиусу-вектору в
сторону возрастания
,
и
,
направленный по радиусу-вектору в
сторону возрастания
,
и
![]() ,
повернутый относительно
на угол
,
повернутый относительно
на угол
![]() в сторону возрастания угла
.
Единичные векторы
и
могут быть представлены через единичные
векторы
в сторону возрастания угла
.
Единичные векторы
и
могут быть представлены через единичные
векторы
![]() координатных осей:
координатных осей:
![]() ,
,
![]() .
.
В дальнейшем нам будут нужны выражения для производных по времени от единичных векторов , .
Дифференцируя по времени, получим
![]() .
(9.15)
Аналогично
.
(9.15)
Аналогично
![]() .
(9.16)
.
(9.16)
Радиус вектор
,
определяющий положение точки, может
быть представлен в виде
![]() .
При движении точки меняются как модуль,
так и направление радиуса-вектора
,
следовательно, и
,
и
являются функциями времени. На основании
равенства (9.11) имеем
.
При движении точки меняются как модуль,
так и направление радиуса-вектора
,
следовательно, и
,
и
являются функциями времени. На основании
равенства (9.11) имеем
![]() .
.
Используя соотношение (9.15), будем иметь
![]() .
.
Полученная формула
дает разложение вектора скорости на
две взаимно перпендикулярные составляющие:
радиальную
![]() и поперечную
и поперечную
![]() .
.
Проекция скорости на радиальное и поперечное направления
![]() и
и
![]() (9.17) называются соответственно
радиальной
и
поперечной
скоростями.
(9.17) называются соответственно
радиальной
и
поперечной
скоростями.
Модуль скорости находится по формуле
![]() .
(9.18)
.
(9.18)
Формулу (9.18) можно получить, используя связь между декартовыми и полярными координатами,
![]() ,
.
,
.
Продифференцировав эти соотношения по
времени
![]() ,
,
![]() и используя равенство (9.13), получим
и используя равенство (9.13), получим
![]() .
.
Нахождение
скорости при естественном способе
задания движения. Пусть
точка
движется по какой-либо кривой. За
промежуток времени
![]() точка переместится из положения
в положение
точка переместится из положения
в положение
![]() .
Дуга
.
Дуга
![]() ,
если движение точки происходит в сторону
положительного отсчета дуги, и
,
если движение точки происходит в сторону
положительного отсчета дуги, и
![]() если,
если движение происходит в противоположную
сторону. На основании (9.11) имеем
если,
если движение происходит в противоположную
сторону. На основании (9.11) имеем
![]() .
.
Перепишем это равенство в виде
![]() .
.
Т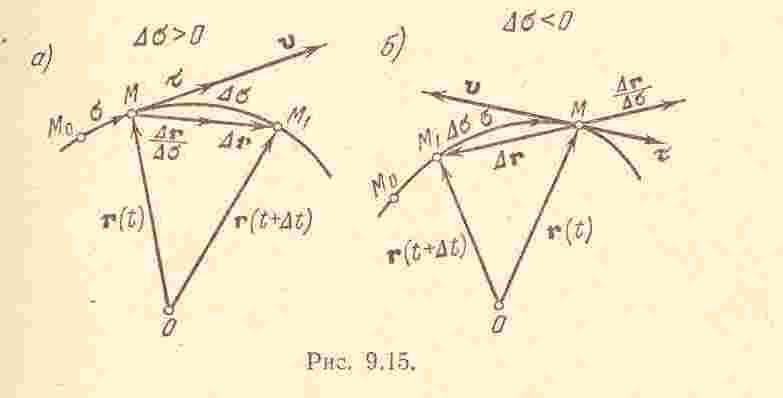 ак
как предел отношения дуги к стягивающей
ее хорде равен по модулю единице, а
предельное положение секущей
ак
как предел отношения дуги к стягивающей
ее хорде равен по модулю единице, а
предельное положение секущей
![]() совпадает с направлением касательной
к кривой в точке
,то
совпадает с направлением касательной
к кривой в точке
,то
![]() ,
,
где
![]() – единичный вектор касательной к кривой,
направленный в сторону положительного
отсчета дуги.
– единичный вектор касательной к кривой,
направленный в сторону положительного
отсчета дуги.
Действительно,
если
![]() ,
то вектор
,
то вектор
![]() направлен в сторону
,
а при
вектор
направлен в сторону, противоположную
.
В обоих случаях этот вектор, а следовательно,
и его предел
направлен в сторону
,
а при
вектор
направлен в сторону, противоположную
.
В обоих случаях этот вектор, а следовательно,
и его предел
![]() ,
направлены в сторону возрастания дуги
(на рис. положительное направление
отсчета дуги
выбрано вправо от начала отсчета
).
,
направлены в сторону возрастания дуги
(на рис. положительное направление
отсчета дуги
выбрано вправо от начала отсчета
).
Принимая во внимание, что
![]() ,
,
имеем
![]() .
(9.19)
.
(9.19)
Обозначая
![]() ,
получим
,
получим
![]() .
(9.20) Из формулы (9.20)
следует, что
.
(9.20) Из формулы (9.20)
следует, что
![]() .
Очевидно, что
.
Очевидно, что
![]() ,
если движение происходит в сторону
положительного отсчета дуги, и
,
если движение происходит в сторону
положительного отсчета дуги, и
![]() ,
если движение происходит в противоположную
сторону.
,
если движение происходит в противоположную
сторону.
Так как проходимый точкой путь всегда положителен, то элемент пути
и, следовательно, модуль скорости можно определить по формуле
![]() .
.