

9.8. Задачи
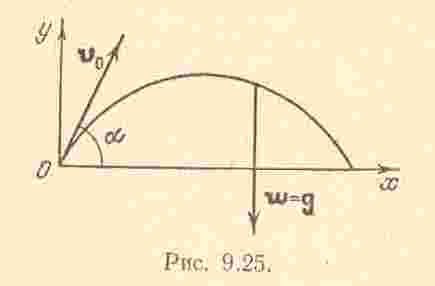
Задача 9.7. Снаряд движется в
вертикальной плоскости согласно
уравнениям
![]() ,
,
![]() .
Определить скорость и ускорение снаряда
в начальный момент времени, высоту
траектории, дальность полета, а также
радиус кривизны в начальной и наивысшей
точках траектории. Ось
направлена горизонтально, а ось
– вертикально вверх.
.
Определить скорость и ускорение снаряда
в начальный момент времени, высоту
траектории, дальность полета, а также
радиус кривизны в начальной и наивысшей
точках траектории. Ось
направлена горизонтально, а ось
– вертикально вверх.
Решение. Траекторией снаряда, очевидно будет парабола
![]() .
.
Определим сначала скорость движения снаряда. Имеем
![]()
![]() .
.
Следовательно,
![]() .
.
В момент времени
величина скорости
![]() .
Направление скорости определяется по
формулам
.
Направление скорости определяется по
формулам
![]()
При получим
![]()
т.е. скорость в начальный момент образует с осью угол .
Проекции ускорения на координатные оси будут
![]() ,
,
![]() ,
,
следовательно, модуль ускорения равен
![]()
 ,
,
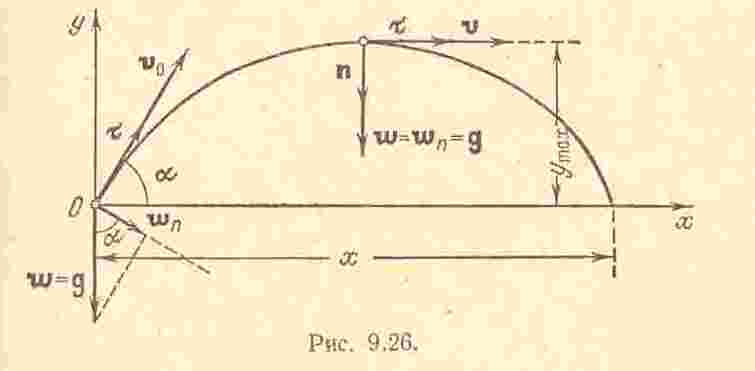
и оно направлено по вертикали вниз
(ускорение свободного падения). Под
высотой траектории понимается максимальное
значение ординаты
.
Очевидно, что
принимает максимальное значение при
![]() ,
т.е. когда
,
т.е. когда
![]() .
.
Находя отсюда
![]() и подставляя его в уравнение для
,
получим
и подставляя его в уравнение для
,
получим
![]() .
.
Дальность полета определяется из условия
![]() .
Из уравнения
.
Из уравнения
![]()
найдем
![]() ,
,
![]() .
.
Момент
соответствует начальному положению
снаряда. Подставляя
![]() в уравнение для
,
найдем дальность полета
в уравнение для
,
найдем дальность полета
![]() .
.
Максимальная дальность полета будет
при
![]() и равна
и равна
![]() .
.
Найдем теперь радиус кривизны траектории в начальной и наивысшей ее точках. Из формулы имеем
![]() .
.
Таким образом, задача нахождения радиуса кривизны траектории сводится к нахождению скорости и проекции ускорения на нормаль.
Согласно (9.33) имеем
![]() .
.
Так как движение точки происходит все
время в сторону возрастания дуги,
![]() ,
и, следовательно,
,
и, следовательно,

При
![]() ,
а так как
,
а так как
![]() ,
то
,
то
![]() и, следовательно, радиус кривизны
траектории в начальной точке равен
и, следовательно, радиус кривизны
траектории в начальной точке равен
![]() .
.
Для момента времени
![]() ,
соответствующего наивысшей точке
траектории,
,
поэтому
,
соответствующего наивысшей точке
траектории,
,
поэтому
![]() .
.
Скорость точки в этот момент равна
![]() и радиус кривизны в наивысшей точке
траектории будет
и радиус кривизны в наивысшей точке
траектории будет
![]() .
.
Отметим, что в данной задаче проекцию ускорения на нормаль в начальной и наивысшей точках траектории можно легко найти и простым проектированием.
З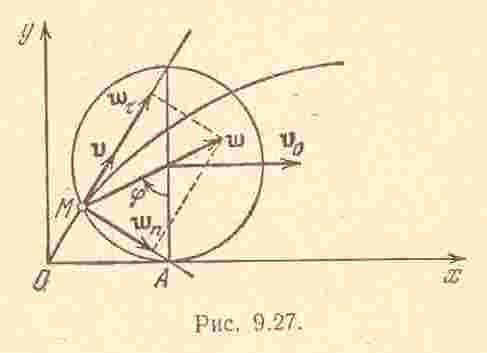 адача
9.8. Колесо радиуса
катится без скольжения по горизонтальному
рельсу. Скорость центра колеса постоянна
и равна
.
Найти уравнения движения точки
,
лежащей на ободе колеса, ее траекторию,
скорость, ускорение и радиус кривизны
траектории как функцию времени.
адача
9.8. Колесо радиуса
катится без скольжения по горизонтальному
рельсу. Скорость центра колеса постоянна
и равна
.
Найти уравнения движения точки
,
лежащей на ободе колеса, ее траекторию,
скорость, ускорение и радиус кривизны
траектории как функцию времени.
Решение. По условию, колесо катится
без скольжения, следовательно, дуга
![]() равна отрезку
равна отрезку
![]() при предположении, что в начальный
момент времени точка
находилась в точке
при предположении, что в начальный
момент времени точка
находилась в точке
![]() .
.
Так как дуга![]() ,
а
,
а
![]() ,
то
,
то
![]() и
и
![]() ,
где
,
где
![]() .
.
Координаты точки будут:
![]() ,
,
![]() .
.
Эти уравнения можно рассматривать как параметрические уравнения траектории, которая представляет собой циклоиду.
Проекции скорости точки на оси
![]() и
и
![]() равны
равны
![]() ,
,
![]() .
.
Модуль скорости равен
![]() .
.
Заметим, что угол
изменяется от нуля до
и поэтому
![]() .
.
Направляющие косинусы вектора скорости будут

Отсюда следует, что вектор скорости все время проходит через верхнюю точку колеса.
Проекции ускорения на оси и равны
![]() ,
,
![]()
и, следовательно,
![]() ,
,
а так как
![]()
то вектор ускорения точки всегда проходит через центр колеса.
Радиус кривизны траектории найдем из выражения
.
Так как
![]() и при
и при
![]() ,
то
,
то
![]() .
.
Следовательно,
 ,
,
где
![]() – длина отрезка от рассматриваемой
точки колеса до его нижней точки.
– длина отрезка от рассматриваемой
точки колеса до его нижней точки.
З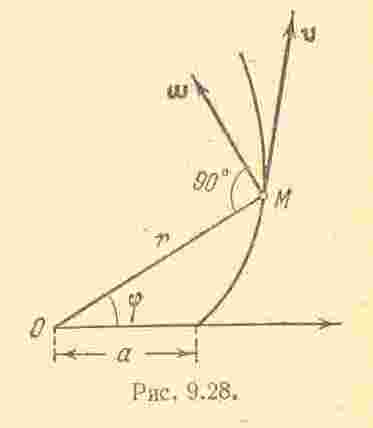 адача
9.9. Движение точки
задано в полярных координатах уравнениями
адача
9.9. Движение точки
задано в полярных координатах уравнениями
![]() и
и
![]() ,
где
и
– постоянные величины.
,
где
и
– постоянные величины.
Найти уравнение траектории, скорость, ускорение и радиус кривизны траектории точки как функции ее радиуса .
Решение. Исключая из уравнений и время , получим уравнение траектории
![]() .
.
Это – уравнение логарифмической спирали.
Согласно формуле (9.17) радиальная и поперечная составляющие скорости соответственно будут
![]() ,
,
![]() .
.
Следовательно, скорость точки равна
![]() .
.
Согласно формулам (9.26) будем иметь
![]() ,
,
![]() ,
,
т.е. ускорение точки
![]() .
.
Определим теперь радиус кривизны траектории. На основании (9.32) получим
.
Скорость
нами уже определена. Найдем
![]() .
Согласно (9.33)
.
Согласно (9.33)
;
имеем
![]() .
.
Таким образом,
![]() .
.
Итак, радиус кривизны траектории
![]() .
.
Задача 9.10. Радар
![]() ,
установленный на берегу, непрерывно
следит за движением судна
,
определяя в каждый момент расстояние
и угол
между меридианом и направлением радара
на судно, а также скорости изменения
этих величин. Пренебрегая кривизной
земной поверхности, определить модуль
скорости судна
относительно Земли, его курс (угол
между меридианом и скоростью
)
и расстояние
,
установленный на берегу, непрерывно
следит за движением судна
,
определяя в каждый момент расстояние
и угол
между меридианом и направлением радара
на судно, а также скорости изменения
этих величин. Пренебрегая кривизной
земной поверхности, определить модуль
скорости судна
относительно Земли, его курс (угол
между меридианом и скоростью
)
и расстояние
![]() от радара до направления скорости
.
от радара до направления скорости
.
Для решения задачи построим прямоугольную
систему координат
![]() ,
направив ось
по касательной к меридиану на север, а
ось
по касательной к параллели на запад.
Величины
,
,
,
направив ось
по касательной к меридиану на север, а
ось
по касательной к параллели на запад.
Величины
,
,
![]() и
и
![]() ,
которые непрерывно измеряет радар, суть
полярные координаты судна и их скорости.
Поэтому модуль скорости будет (9.18):
,
которые непрерывно измеряет радар, суть
полярные координаты судна и их скорости.
Поэтому модуль скорости будет (9.18):
.
Для определения курса (угла
)
разложим вектор скорости судна
на радиальную
![]() и поперечную
и поперечную
![]() составляющие. Имеем (см. рис.):
составляющие. Имеем (см. рис.):
![]()
(углы
![]() и
и
![]() – соответственные при параллельных
прямых
– соответственные при параллельных
прямых
![]() и
и
![]() ,
а
,
а
![]() – внешний для треугольника
).
– внешний для треугольника
).
Из треугольника
![]() найдем
найдем
![]() ,
,
или, учитывая значения проекций поперечной и радиальной составляющих скорости ,
![]() .
(9.34)
.
(9.34)
Отсюда
![]() .
(9.35)
.
(9.35)
Из треугольника
![]() найдем
параметр
:
найдем
параметр
:
![]() .
(9.36)
.
(9.36)
С помощью компьютера скорость судна , его курс и параметр непрерывно определяются по формулам (9.18), (9.35) и (9.36) или им эквивалентным.
Если судно идет постоянным курсом
,
т.е. движется по прямой линии
![]() ,
то равенство (9.36) определяет уравнение
траектории судна в полярных координатах.
Покажем, что при
,
то равенство (9.36) определяет уравнение
траектории судна в полярных координатах.
Покажем, что при
![]() это уравнение может быть получено из
равенства (9.34).
это уравнение может быть получено из
равенства (9.34).
Д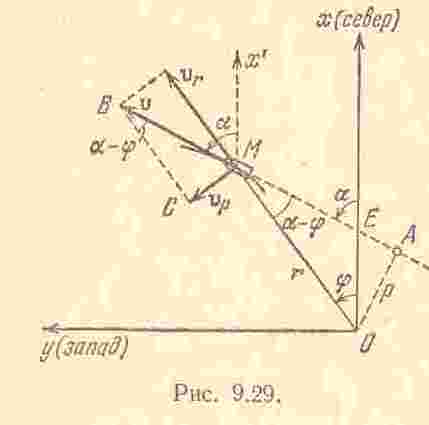 ействительно,
умножая числитель и знаменатель
ействительно,
умножая числитель и знаменатель
правой части равенства (9.34) на
![]() ,
получим
,
получим
![]() ,
,
или
![]() .
.
Интегрируя обе части этого равенства и учитывая, что по предположению , получим
![]() ,
(9.37) где
,
(9.37) где
![]() – произвольная постоянная интегрирования.
При
– произвольная постоянная интегрирования.
При
![]() расстояние от радара до судна будет
равно
,
т.е.
расстояние от радара до судна будет
равно
,
т.е.
![]() .
Подставляя эти значения в (9.37), найдем
.
Подставляя эти значения в (9.37), найдем
![]()
или
![]() .
.
Внося это значение для в равенство (9.37), получаем
![]() ,
,
откуда следует равенство (9.36)
![]() .
.
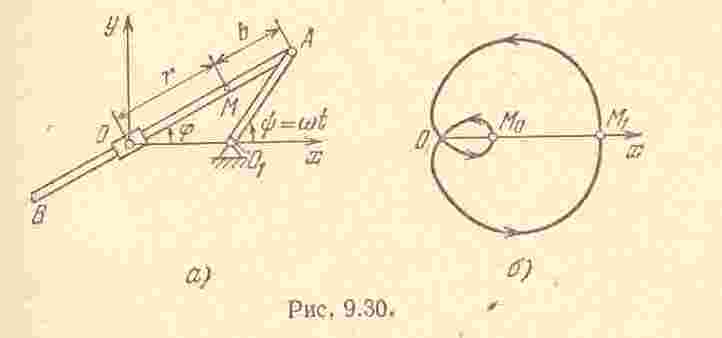
Задача 9.11. Угол
![]() между неподвижной осью
и кривошипом
между неподвижной осью
и кривошипом
![]() изменяется по закону
изменяется по закону
![]() ,
где
– постоянное положительное число. С
кривошипом в точке
,
где
– постоянное положительное число. С
кривошипом в точке
![]() шарнирно соединен стержень
шарнирно соединен стержень
![]() ,
проходящий постоянно через качающуюся
муфту
.
Найти уравнения движения точки
стержня
,
отстоящей от точки
на расстоянии
,
проходящий постоянно через качающуюся
муфту
.
Найти уравнения движения точки
стержня
,
отстоящей от точки
на расстоянии
![]() ,
ее траекторию, скорость и ускорение,
если
,
ее траекторию, скорость и ускорение,
если
![]() .
.
Решение. Положение точки
проще всего определяется полярными
координатами: радиусом
![]() и полярным углом
и полярным углом
![]() .
Так как треугольник
.
Так как треугольник
![]() равнобедренный, то
равнобедренный, то
![]() ,
а сторона
,
а сторона
![]() .
Из рис. имеем
.
Из рис. имеем
![]() ;
следовательно, уравнения движения точки
будут:
;
следовательно, уравнения движения точки
будут:
![]() ,
,
![]() .
.
Исключая отсюда время , найдем уравнение движения точки в полярных координатах:
![]() .
.
(Для сравнения самостоятельно найти уравнения движения и траекторию в декартовых координатах).
На рис. показана траектория точки
,
построенная по точкам для случая
![]() (при
(при
![]() получается
обычная кардиоида). Точка
– начальная точка траектории,
соответствующая моменту времени
или
получается
обычная кардиоида). Точка
– начальная точка траектории,
соответствующая моменту времени
или
![]()
![]() .
Направление движения точки
показано стрелками. Отметим, что точка
попадет в свое начальное положение
не через один оборот кривошипа
,
а через два оборота, когда угол
изменится на
.
Направление движения точки
показано стрелками. Отметим, что точка
попадет в свое начальное положение
не через один оборот кривошипа
,
а через два оборота, когда угол
изменится на
![]() ,
а угол
на
,
а угол
на
![]() радиана (это произойдет в момент времени
радиана (это произойдет в момент времени
![]() ).
).
Найдем проекции скорости точки на радиальное и поперечное направления. Имеем
![]() ,
,
![]() .
.
Теперь найдем модуль скорости точки :
![]() ,
,
или, подставляя найденные значения для и и произведя очевидные преобразования, получим
![]() .
.
Для ускорения будем иметь:
![]() ,
,
![]() .
.
Модуль ускорения
![]() .
.
В начальной точке
при
![]() :
:
![]() ,
,
![]() .
.
Через один оборот кривошипа
![]() ,
,
![]() точка
попадет в положение
точка
попадет в положение
![]() и ее скорость и ускорение будут
соответственно равны
и ее скорость и ускорение будут
соответственно равны
![]() ,
,
![]() .
.