

Глава XIV
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
14.1. Постановка задачи
Пусть твердое тело
движется относительно подвижной системы
координат
![]() ,
а последняя в свою очередь перемещается
относительно основной системы координат
,
а последняя в свою очередь перемещается
относительно основной системы координат
![]() ,
принимаемой за неподвижную. В этом
случае говорят, что тело совершает
сложное движение, которое состоит из
двух составляющих движений.
,
принимаемой за неподвижную. В этом
случае говорят, что тело совершает
сложное движение, которое состоит из
двух составляющих движений.
Сложное движение
может состоять из
составляющих движений. В этом случае
имеется
систем координат изадается
движений: движение тела относительно
системы координат
![]() ,
движение системы
относительно системы
,
движение системы
относительно системы
![]() и т.д. Наконец задается движение системы
относительно основной системы
.
Движение тела или движение какой-либо
одной системы координат относительно
другой в общем случае ничем не ограничено.
Задача заключается в нахождении
зависимости между основными характеристиками
составляющих движений и сложного
движения.
и т.д. Наконец задается движение системы
относительно основной системы
.
Движение тела или движение какой-либо
одной системы координат относительно
другой в общем случае ничем не ограничено.
Задача заключается в нахождении
зависимости между основными характеристиками
составляющих движений и сложного
движения.
В главе XII было установлено, что движение свободного твердого тела можно представить как сложное движение, состоящее из совокупности сферического движения вокруг некотрого полюса и поступательного движения тела вместе с системой координат, связанной с полюсом. Таким образом, основными кинематическими характеристиками движения тела являются скорость и ускорение поступательного движения и угловые скорости и ускорения. Следовательно, задача изучения сложного тела, заключающаяся в нахождении зависимости между основными характеристиками составляющих движений и сложного движения, сводится к установлению связи между поступательными и угловыми скоростями и ускорениями составляющих движений. В настоящем курсе мы ограничимся лишь установлением связи между поступательными и угловыми скоростями.
Рассмотрение начнем с простейших случаев.
§ 14.2. Сложение поступательных движений
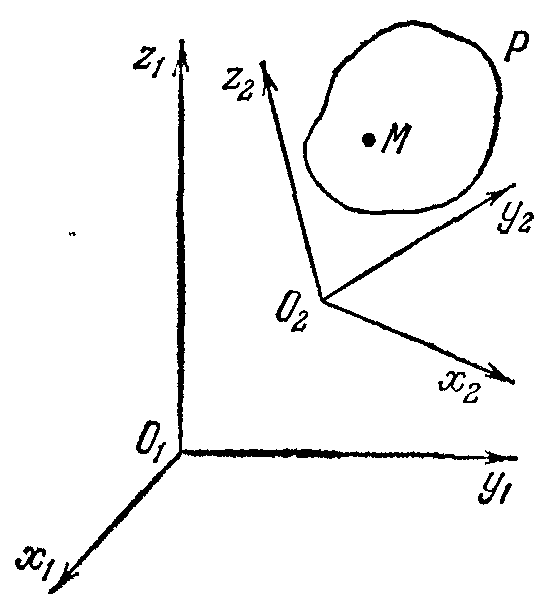
Пусть Vj — скорость поступательного движения тела Р относительно системы 02х2угг2 (рис. 14.1), a v2 —скорость поступательного движения системы 02x2y2z2 относительно неподвижной системы координат 01х1у1г1. Тогда, чтобы найти абсолютную скорость какой-либо точки М тела Р, нужно применить теорему о сложении скоростей (глава XIII):
vM = vr + ye (14.1) Рис. 14.1.
В нашем случае vr = vx и ve = v2, следовательно,
vM = v1+ v2. (14.2)
Таким образом, у всех точек тела абсолютные скорости оказались одинаковыми, следовательно, при сложении поступательных движений твердого тела результирующее движение будет также поступательным и скорость результирующего движения равна сумме скоростей составляющих движений.
В случае п поступательных движений, применяя последовательно формулу (14.1), можно показать, что результирующее движение также будет поступательным и его скорость будет равна сумме скоростей составляющих движений, т. е.
![]()
Возможен случай, когда скорости всех точек тела только в данный момент времени оказываются равными между собой. Этот случай называют мгновенно-поступательным движением. Однако следует иметь в виду, что ускорения точек при этом различны (см. случай а) в задаче 11.9).