

Глава 2. Авиационные автоматические радиокомпасы
2.1. Принцип работы автоматического радиокомпаса
Упрощенная схема автоматического радиокомпаса и принцип ее работы
Автоматическими радиокомпасами (АРК) называют бортовые амплитудные одномерные радиопеленгаторы, предназначенные для измерения курсового угла радиостанции (КУР). КУР - угол в горизонтальной плоскости между продольной осью ВС и направлением на радиостанцию (см. рис 1.5). Радиопеленгование - определение направления на источник радиоизлучения с помощью радиотехнических средств.
Для обеспечения работы АРК служат специальные наземные приводные и широковещательные радиостанции соответствующего диапазона.
Основным элементом АРК для определения направления на радиостанцию является направленная рамочная антенна. В простейшем случае рамочная антенна представляет тонкий проводник, имеющий форму замкнутой плоской фигуры (прямоугольника, окружности, ромба, эллипса).
При рассмотрении основных свойств рамочной антенны предполагают, что плоскость рамки вертикальная, а направление распространения электромагнитных колебаний составляет с плоскостью рамки угол 9 (рис. 2.1).
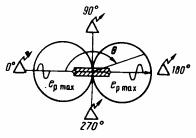
Рис. 2.1. Диаграмма направленности рамочной антенны
Напряженность электромагнитного поля определяют выражением
Электродвижущая сила (э.д.с), наводимая в рамочной антенне (ер) электромагнитным полем, согласно закону электромагнитной индукции пропорциональна скорости изменения магнитного потока в единицу времени и определяется выражением [7, 10]
![]()
где hд — действующая высота рамочной антенны.
В свою очередь
![]()
где Ертах - максимальная амплитуда э.д.с. рамочной антенны; Ет - амплитуда напряженности электромагнитного поля.
Для воздушной рамки действующая высота
hд = 2π SN/λ
где S — площадь рамки; N — число витков; λ — длина волны электромагнитного поля.
Действующая высота hд характеризует эффективность рамки, ее значение должно быть как можно больше. Увеличить hд рамки можно увеличением S и N (это приведет к увеличению размеров рамки) и уменьшением длины волны к. Из условий распространения радиоволн самыми приемлемыми являются волны гектаметрового (средневолнового) диапазона. Поэтому для увеличения hд применяют многовитковые рамочные антенны с ферромагнитными магнитопроводами проницаемости (1, при этом
![]()
При использовании магнитопровода увеличивается индуктивность, которая должна оставаться постоянной. Для восстановления ее прежнего значения необходимо уменьшать число витков. Учитывая [12],
![]()
где Nc, N- число витков рамочной антенны с магнитопроводом и без него.
При
использовании магнитопроводов
hд
увеличивается
в
![]() раз,
т. е.
раз,
т. е.
![]()
Так как ер = Ет cosθ sinωt, то э.д.с. рамочной антенны в зависимости от направления приема (угла θ) изменяется по косинусоидальному закону, а график косинусоиды имеет форму восьмерки, которая является диаграммой направленности рамочной антенны (см. рис. 2.1).
Диаграмма направленности обладает следующими основными свойствами:
в двух направлениях, перпендикулярных плоскости рамки (θ=90 и 270°), э.д.с. в рамочной антенне равны нулю (cos 90°= =0 и cos 270° = 0). Эти направления называют направлениями "нулевого" приема;
фаза э.д.с. рамки сдвинута на 90° относительно фазы возбуждающего ее электромагнитного поля;
при переходе через "нулевой" прием фаза э.д.с. рамки изменяется на 180°;
в двух направлениях, совпадающих с плоскостью рамки (θ = 0 и 180°), амплитуды э.д.с. рамки максимальны и противофазны (cos 0=1; cos 180° = -1);
значение амплитуды э.д.с. рамки зависит от направления распространения радиоволн относительно плоскости рамки.
Эти свойства рамочной антенны используют в автоматическом радиокомпасе. Принцип его работы для понимания удобно сначала рассмотреть на упрощенной схеме АРК, который способен работать в следующих условиях: при использовании только одной радиостанции, курсовой угол которой надо измерять; для управления вращением рамки применяется высокочастотный и высокочувствительный двухфазный асинхронный двигатель.
Упрощенная схема такого радиокомпаса (рис. 2.2) состоит из рамочной антенны 1, нагруженной на управляющую обмотку 2, и двигателя 3. Он механически соединен с рамкой и стрелочным индикатором 4, шкала которого жестко связана с корпусом (фюзеляж ) ВС, а треугольный индекс указывает направление продольной оси ВС. В рамочной антенне наводится э.д.с, фаза которой зависит от стороны расположения радиостанции относительно продольной оси, и сигнал рамочной антенны называется управляющим.
Для определения фазы управляющего сигнала необходим опорный сигнал, для чего используют ненаправленную антенну 5, имеющую круговую диаграмму направленности. Фаза э.д.с. антенны совпадает с фазой возбуждающего ее электромагнитного поля и сдвинута на 90° относительно фазы э.д.с. рамки. Ненаправленная антенна подключена к обмотке возбуждения 6 двигателя.
Под действием э.д.с. ненаправленной антенны в обмотке возбуждения протекает ток i1, который создает магнитный поток Ф1. Если плоскость рамки перпендикулярна направлению приема, то э.д.с. в рамочной антенне равна нулю, ток и магнитный поток отсутствуют, двигатель не вращается (вращающий момент отсутствует) и не изменяет положение стрелки индикатора, КУР=0 (направление "нулевого" приема совпадает с продольной осью ВС).
Если радиостанция находится в положении (справа, слева), отличающемся от перпендикулярного плоскости рамки (равнозначно повороту рамки от положения "нулевого" приема), то в ней наводится э.д.с. соответствующей фазы и амплитуды. Под ее действием в управляющей обмотке двигателя протекает ток i2, который создает магнитный поток Ф2. Он складывается с потоком Ф1, образуя результирующий поток Фр , который создает вращающий момент двигателю. Двигатель начинает поворачивать рамку и стрелку по кратчайшему пути до тех пор, пока э.д.с. в рамке станет равна нулю, т. е. до положения "нулевого" приема, и двигатель, остановится, а стрелка индикатора укажет КУР. Если фаза э.д.с. рамки была положительной (рамка влево от положения "нулевого" приема), то двигатель вращается вправо и влево при отрицательной фазе, т. е. привод рамки к положению "нулевого" приема будет следящим и автоматическим.
Несмотря на то что диаграмма направленности рамки имеет два "нулевых" приема, КУР измеряют однозначно благодаря автоматическому следящему приводу, у которого положение истинного "нулевого" приема устойчиво, а положение ложного (противоположного) "нулевого" приема неустойчиво. При ложном нулевом приеме КУР измеряют в погрешностью в 180°. При отклонении рамки от положения ложного "нулевого" приема двигатель поворачивает ее в ту же сторону через 180° к положению истинного "нулевого" приема.
В автоматических радиокомпасах, кроме подвижной рамочной антенны, используют неподвижные рамочные антенны (блок рамочных антенн) и гониометр. Упрощенная схема такого АРК показана на рис. 2.3.
■>•>
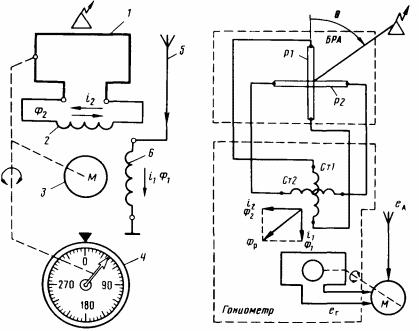
Рис. 2.2. Упрощенная схема Рис. 2.3. Упрощенная схема модели
модели автоматического РК радиокомпаса с неподвижными рамочными
Блок рамочных антенн выполнен в виде двух взаимно перпендикулярных рамочных антенн на общем ферромагнитном магнитопрово-де. Одна рамочная антенна совпадает с продольной осью ВС, и эту рамку называют продольной рамкой Р1, а другая перпендикулярна оси, и ее называют поперечной рамкой Р2. Каждая из рамочных антенн соединена с гониометром (гониометр - от греч. gonia- угол и metreo-измеряю).
Гониометр представляет машину электрического типа, которая содержит две взаимно перпендикулярные статорные катушки Ст1 и Ст2, соединенные с обмотками рамочных антенн, и одну подвижную роторную, находящуюся внутри статора. Статорные катушки называют полевыми, роторную - искателем или просто рамкой. Ротор гониометра управляется двигателем.
При приеме электромагнитных колебаний, приходящих под углом θ , в обмотках рамочных антенн Р1 и Р2 создаются напряжения, амплитуды которых:
![]() ;
;
![]()
где Um — максимальные напряжения в рамочных антеннах.
Под действием этих напряжений в полевых катушках гониометра протекают токи i1 i2, которые создают магнитные потоки Ф1 и Ф2.. Они складываются и создают результирующий поток Фр. Вектор суммарного потока Фр совпадает с направлением на радиостанцию. Определение этого направления равнозначно определению КУР. Под действием результирующего магнитного потока Фр в роторной катушке наводится э.д.с. ег, фаза и амплитуда которой зависят от углового положения вектора потока Фр, т. е. от направления продольной оси ВС относительно пеленгуемой радиостанции. Напряжение с роторной катушки поступает на двигатель, и он поворачивает ротор до тех пор, пока это напряжение не станет равным нулю, т. е. поворачивает искатель до положения "нулевого" приема.
Таким образом, направленные свойства роторной катушки аналогичны свойствам поворотной рамочной антенны.
Принцип работы АРК с неподвижными рамочными антеннами и гониометром аналогичен синусно-косинусной следящей системе дистанционной передачи информации, только передача осуществляется по высокой частоте. В качестве датчика служит корпус ВС с взаимно перпендикулярными рамочными антеннами, а гониометр выполняет функцию приемника такой системы.
Условия, при которых упрощенно рассмотрен принцип работы схемы АРК, не выполнимы, так как:
реально существует множество радиостанций (только в одном аэропорту) и для обеспечения требуемой избирательности и помехоустойчивости необходимо предусмотреть чувствительный, высокоизбирательный радиоприемник супергетеродинный;
в радиоаппаратуре в качестве исполнительных двигателей используют двигатели, питаемые током низкой (звуковой) частоты (например, 400 Гц) и поэтому управляющий высокочастотный (ВЧ) сигнал рамки (искателя гониометра) и опорный ненаправленной антенны необходимо преобразовать в управляющий сигнал (для двигателя) низкой частоты (НЧ), причем его фаза должна соответствовать фазе ВЧ сигнала рамки, т. е. необходимо при преобразовании сохранить фазовые соотношения;
обычно индикатор КУР расположен на приборной доске ВС и для передачи КУР на индикатор надо применить следящую систему или индикаторную передачу.
Структурная схема типового АРК
Обязательными элементами типового АРК (рис. 2.4) являются рамочная антенна (подвижная или неподвижная с гониометром), ненаправленная антенна и двигатель вращения рамки (искателя гониометра).
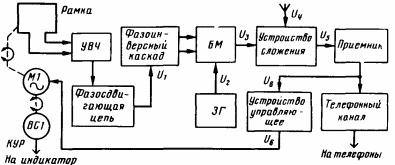
Рис. 2.4. Структурная схема типового автоматического радиокомпаса
Для преобразования ВЧ управляющего и опорного сигналов в управляющее напряжение низкой частоты предусмотрена амплитудная фазочувствительная местная модуляция, с помощью которой ВЧ сигналы (управляющий и опорный) преобразуются в амплитудномодулированное колебание, причем фаза его огибающей должна соответствовать фазе э.д.с рамки (искатели гониометра), а частота огибающей - частоте модуляции. Эта огибающая и может содержать информацию об управляющем сигнале низкой частоты. Ее выделение осуществляется в процессе детектирования.
Преобразование ВЧ сигналов в управляющий НЧ сигнал осуществляется следующим образом.
Высокочастотный сигнал U1 (рис. 2.5) рамки (искателя гониометра) усиливается усилителем сигналов высокой частоты УВЧ (см. рис. 2.4) и через фазосдвигающую цепь поступает на амплитудный модулятор. На него от генератора звуковой частоты ЗГ поступает напряжение U2 звуковой частоты (желательно 400 Гц) модуляции. В качестве нелинейного элемента в схеме модулятора может использоваться транзистор, диод (ламповый или полупроводниковый), электронная лампа, магнитный усилитель и т. д. Наиболее простой схемой модулятора является однотактная. В нагрузке такого модулятора образуется амплитудно-модулированное колебание (АМК), но фаза его огибающей не изменяется, т. е. не соответствует фазе э.д.с. рамки (искателя гониометра).
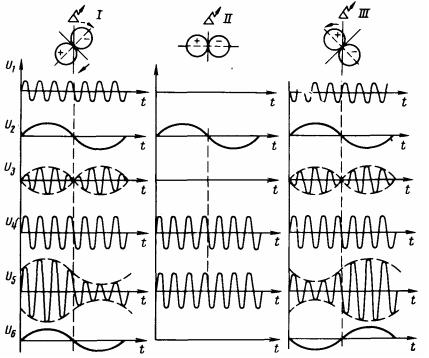
Рис. 2.5. Временные диаграммы напряжения в элементах радиокомпаса
Балансный модулятор (двухтактный) содержит два нелинейных элемента (например, диоды и нагрузку). Такая схема требует симметричного противофазного возбуждения, и поэтому перед ней включает фазоинверсный каскад, на выходе которого формируются напряжения Uа, U6 (рис. 2.6). Эти напряжения к диодам VD1 и VD2 прикладывают в противофазе, а напряжение модуляции U2 - синфазно.
При положительном полупериоде напряжения модуляции U2 диод VD1 открыт, a VD2 закрыт и через сопротивление нагрузки RH протекает амплитудно-модулированный ток i1. При отрицательном полупериоде напряжения U2 закрывается диод VD1, открывается диод VD2 и через нагрузку протекает ток i2 в направлении, противоположном току i2 на нагрузке образуется балансно-модулированное колебание (БМК) U3, у которого изменяется на 180° (коммутируется) фаза ВЧ сигнала через каждые полпериода напряжения модуляции, поэтому балансный модулятор (БМ) еще называют коммутатором фазы. Но, как видно из временных диаграмм, балансный модулятор не сохраняет фазовых соотношений, т.е. не обеспечивает перенос фазы ВЧ сигнала рамки в фазу огибающей АМК. Другой особенностью такого модулятора является то, что он подавляет в нагрузке колебания несущей частоты и выделяет только напряжения боковых частот (fн ± FM).
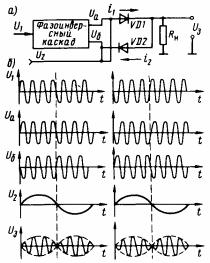
Рис. 2.6. Схема балансного модулятора (в) и временные диаграммы напряжений (б)
Для восстановления несущей частоты используют опорный сигнал U4 (см. рис. 2.4 и 2.5) ненаправленной антенны. Восстановление происходит в устройстве сложения, на которое подают колебания БМК и опорный сигнал ненаправленной антенны. При сложении (вычитании) этих сигналов образуются обычные АМК U5, причем фаза их огибающей определяется фазой э.д.с. рамки (искателя), а частота огибающей равна частоте модуляции. Таким образом, в устройстве сложения осуществляется фазочувствительная амплитудная местная модуляция, глубина которой определяется углом отклонения рамки (искателя гониометра) от положения "нулевого" приема. Для получения оптимальной глубины местной амплитудной модуляции необходимо, чтобы в устройстве сложения рамочный сигнал и сигнал ненаправленной антенны находились в фазе или противофазе. Но эти сигналы на выходе рамки (искателя) и ненаправленной антенны сдвинуты по фазе на 90° (см. рис. 2.1). Поэтому в рамочном канале включена фазосдвигающая цепь, которая осуществляет фазовый сдвиг сигнала рамки на 90°.
Полученные в устройстве сложения колебания АМК поступают в приемник, который осуществляет избирательность по всем каналам, усиление этих колебаний, преобразование и детектирование. На нагрузке детектора приемника выделяется огибающая АМК, которая называется управляющим сигналом U6 частотой, равной частоте модуляции.
Управляющее напряжение поступает в управляющее устройство и затем на двигатель вращения рамки (искателя). В зависимости от типа двигателя и выбора частоты модуляции управляющее устройство может выполнять функцию усилителя напряжения НЧ или преобразователя напряжения и усилителя. Частоту модуляции выбирают не равной 400 Гц, так как радиокомпас может принимать модулированные сигналы с телефонным спектром 300...3000 Гц, в пределах которого находится частота 400 Гц. Телефонные сигналы используют для опознавания наземных радиостанций по позывным сигналам. Разделение управляющего и телефонного сигналов частотой 400 Гц сопряжено с большими схемными трудностями, поэтому частоту модуляции выбирают низкую, вне пределов спектра телефонных сигналов. В автоматических радиокомпасах АРК-5 она равна 50 Гц, АРК-9, АРК-11, АРК-У2 и АРК-УД - 30 Гц, АРК-15М - 135 Гц, АРК-22 - 90 Гц. Поэтому управляющий сигнал указанных частот преобразуется в управляющем устройстве (за исключением АРК-15М ) в напряжение частотой 400 Гц с сохранением фазовых соотношений. В радиокомпасе АРК-15М управляющее устройство выполняет функцию усилителя сигналов низкой частоты. Управляющее напряжение поступает на двигатель M1, который вращает рамку (искатель) до тех пор, пока э.д.с. рамки (искателя) и управляющее напряжение низкой частоты не станут равными нулю, а рамка (искатель) повернется на угол значением, пропорциональным КУР. Для передачи данных КУР на индикатор используется следящая система или индикаторная передача.
На этом принципе основана работа всех перечисленных радиокомпасов, которые различаются элементной базой. Радиокомпас АРК-5 выполнен на электровакуумных приборах АРК-9, АРК-11 - на электровакуумных приборах и транзисторах, АРК-15М и АРК-22 - на транзисторах и микросхемах, АРК-УД - на транзисторах. Во всех радиокомпасах, за исключением радиокомпасов АРК-15М и АРК-22, используют поворотные рамочные антенны, а в радиокомпасах АРК-15М и АРК-22 -неподвижные рамочные антенны и гониометр.
При использовании рамочных антенн возможны погрешности при измерении КУР.
Одной из погрешностей в измерении КУР является погрешность, вызванная действием на направленную антенну, кроме поля приходящей радиоволны, вторичного электромагнитного поля, отраженного (переизлученного) корпусом ВС, его выступающими частями, антеннами других радиосредств. Эта погрешность называется радиодевиацией ΔР.
Такие погрешности имеют систематический характер, т. е. от измерения к измерению сохраняют свое значение и знак, что дает возможность определить их и скомпенсировать. Определяют (измеряют) радиодевиацию на заводе-изготовителе ВС, строят специальные таблицы или графики поправок и, используя их, компенсируют радиодевиацию специальными механическими компенсаторами радиокомпаса. Кроме того, в радиокомпасах с антенно-гониометрической системой радиодевиацию частично компенсируют электрическим способом, используя различные действующие высоты неподвижных рамочных антенн.
Погрешности в измерении КУР вызываются и антенным эффектом. (Антенным эффектом называют дополнительный ненаправленный прием рамочной антенной.) Они возникают из-за наличия распределенных емкостей паразитных связей плеч рамочной антенны с корпусом ВС, и каждое плечо по существу является ненаправленной антенной с круговой диаграммой направленности. При несимметричной рамочной антенне и несимметричной входной цепи рамочного канала радиокомпаса круговые диаграммы плеч будут различны. Они накладываются на диаграмму направленности рамки ("восьмерку"), при этом положение "нулевого" приема будет смещено. Для уменьшения погрешности, вызванной антенным эффектом, осуществляют симметрирование плеч рамочной антенны и входных цепей рамочного канала радиокомпаса.
Радиокомпасы в гражданской авиации применяют с 1930-1932 гг. Первые типы радиокомпасов работали на средних волнах и использовали сигналы широковещательных радиостанций (ШРВС) с ручным вращением рамочной антенны и определением КУР на слух. В 1935- 1938 гг. внедрены в эксплуатацию радиополукомпасы (РПК) со стрелочным индикатором. Такой радиокомпас был установлен на самолетах экспедиции М. В. Водопьянова на Северный полюс в 1937 г. В 1940-1941 гг. были разработаны автоматические радиокомпасы. Наряду с использованием средневолнового диапазона для обеспечения межсамолетной навигации, операций поиска и спасения экипажей, терпящих бедствия, созданы специальные АРК, работающие в диапазоне метровых волн (радиокомпасы АРК-У2, АРК-УД).
Для расширения навигационных возможностей использования АРК на аэродромах и воздушных линиях устанавливают приводные радиостанции.
Общие сведения о приводных радиостанциях
Приводные радиостанции - это наземные радиопередающие устройства, работающие в диапазоне гектаметровых (средних) волн на антенны ненаправленного действия и предназначенные для радионавигации ВС, оборудованных автоматическими радиокомпасами.
Приводные радиостанции в зависимости от решаемых задач подразделяются на внеаэродромные, аэродромные отдельные и посадочные и различаются в основном выходной мощностью.
Внеаэродромные приводные радиостанции устанавливают в определенных точках на местности, маркирующих входы и выходы воздушных коридоров, воздушных зон или пунктов излома воздушных трасс, и служат для привода ВС в соответствующую радионавигационную точку (РНТ) и маркировки ее пролета.
Аэродромные посадочные приводные радиостанции размещают на продолжении оси ВПП со стороны захода ВС на посадку и предназначены для привода ВС в район аэродрома, выполнения предпосадочного маневра и выдерживания посадочного курса на последней прямой. Различают дальнюю (ДПРС) и ближнюю (БПРС) приводные радиостанции. Радиостанции ДПРС размещают на удалениях от начала ВПП (с обеих сторон), равных (40001200) м, БПРС - (10501100) м.
Аэродромные отдельные приводные радиостанции устанавливают в зоне аэродрома (радиус зоны аэродрома составляет 150 км) вдоль оси ВПП в направлении и на удалении от ее конца с учетом обеспечения наиболее удобного и полного их использования летным составом при выполнении упрощенных маневров, связанных с заходом на посадку и пробиванием облачности по утвержденной схеме.
Наиболее широкое применение получили автоматизированные приводные аэродромные радиостанции ПАР-7С и ПАР-8С, которые аналогичны по принципу действия и различаются только излучаемой мощностью (максимальная мощность в телеграфном режиме радиостанции ПАР-7С 1,1...1,2 кВт, ПАР-8С - около 400 Вт). Обе радиостанции работают в диапазоне 100...1500 кГц и в режимах: А1 (телеграфный), А2 (тональный телеграфный), A3 (телефонный). Максимальная дальность действия радиостанции ПАР-7С составляет 650 км, ПАР-8С - 100 км. Дальность действия зависит от частоты и режима работы. Радиостанцию ПАР-7С в системе посадки используют в качестве дальней, ПАР-8С - ближней приводной радиостанции.
Посадочные приводные радиостанции работают в классе излучения А2. Радиостанции ДПРС присваивают двухбуквенный телеграфный позывной, БПРС - однобуквенный (первая буква радиостанции ДПРС).
При наличии радиостанций ДПРС и БПРС с двух направлений посадки каждой дальней и ближней радиостанциям присваивают одну частоту, но различные позывные для каждого направления захода на посадку. Это позволяет экипажу, независимо от направления захода на посадку, настраивать радиокомпас на одну частоту и по позывным сигналам определять направление захода на посадку.