

Глава 4. Радиовысотомеры
4.1. Общие сведения
Назначение высотомеров
Высота является одним из основных параметров движения ВС. Для обеспечения безопасности полетов экипаж должен непрерывно располагать информацией о высоте заданной траектории движения (высоте эшелона полета) и действительной (истинной) высоте полета Н.
Основным источником информации о высоте полета ВС при полетах на больших и средних высотах является барометрический высотомер, который обеспечивает измерение относительной высоты полета с точностью до сотни метров. Его работа основана на измерении атмосферного давления, которое с ростом высоты убывает по экспоненциальному закону. Его используют для измерения больших высот и применяют для эшелонирования по высоте. Для измерения малых высот его не применяют, так как он обладает значительными погрешностями, обусловленными рельефом местности и изменением давления в зависимости от температуры и состояния погоды.
Для управления ВС на заключительном этапе полета - заходе на посадку и посадке необходимо располагать информацией об истинной высоте полета, т. е. расстоянием от земной поверхности по вертикали до ВС с погрешностью 0,3...1 м. Барометрический высотомер не обладает требуемой для решения задач посадки точностью. Поэтому для измерения малых высот используют радиовысотомеры, обеспечивающие измерение истинной высоты полета с высокой точностью, которые являются составной частью пилотажно-навигационных комплексов. Информация об истинной высоте полета имеет особое значение на этапе выравнивания, т. е. на малых высотах, когда ВС переходит от снижения по глиссаде на траекторию с малым углом наклона к земной поверхности. Радиовысотомеры позволяют также контролировать момент достижения ВС заданной высоты полета (высоты принятия решения, опасной высоты). При достижении ВС заданной высоты (при его снижении) выдаются сигналы световой и звуковой сигнализации. Кроме того, радиовысотомеры применяют в качестве датчиков информации о скорости снижения ВС, используемой в современных системах сигнализации об опасной скорости сближения с Землей.
Наряду с использованием радиовысотомеров для измерения малых высот, их применяют и для измерения больших истинных высот, например при проведении аэрофотосъемочных работ.
Радиотехнические методы измерения высоты измерения высоты
В основу работы радиовысотомеров положен принцип пассивной радиолокации, поэтому они относятся к классу автономных РНУ и не требуют для образования канала измерения навигационного параметра наземного оборудования.
Передатчик Прд (рис. 4.1) радиовысотомера, установленного на борту ВС, через антенну излучает на земную поверхность энергию радиоволн. Часть этой энергии отражается в направлении на ВС и через приемную антенну поступает на приемник Прм и затем на измеритель высоты (блок измерения). Он преобразует отраженный сигнал в вид, удобный для индикации, т. е. формирует напряжение U = =φ (Н), пропорциональное времени прохождения сигнала до земной поверхности и обратно t = 2Н/с, а следовательно, пропорциональное высоте Я. Это напряжение контролируется индикатором. Отраженный сигнал содержит информацию о высоте полета. Она может содержаться в одном из четырех параметров, характеризующих электромагнитное поле: амплитуде, частоте, фазе и времени, так как е = Ет sin ω t ± φ. О высоте полета можно судить по изменению одного из параметров отраженного сигнала. Однако изменение амплитуды и фазы отраженного сигнала зависит от отражающих свойств земной поверхности. Поэтому амплитудные и фазовые радиовысотомеры не нашли применения.
Для измерения высоты в радиовысотомерах используют два метода измерений - импульсный и частотный.
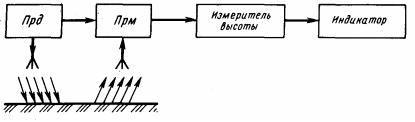
Рис. 4.1. Упрощенная схема радиовысотомера
Импульсный радиовысотомер по принципу работы подобен бортовой радиолокационной станции, в которой используется направленная антенна, ось диаграммы которой совмещается с вертикалью. Сущность импульсного метода измерения высоты сводят к определению времени задержки отраженного от земной поверхности импульса относительно момента излучения импульса передатчиком радиовысотомера. При этом методе определение высоты оказывается возможным лишь при условии, что отраженный сигнал не совпадает во времени с излучаемым, а при очень малых высотах такое совпадение возможно. Это зависит от длительности импульсов, т. е. минимально измеряемая высота определяется разрешающей способностью по дальности (высоте) и определяется, без учета времени переключения антенны, выражением
Нтiн=cτ/2
где τ — длительность импульса передатчика.
Для измерения значения минимальной высоты, равного, например. 1,5 м, длительность импульса не должна превышать 10 не. Трудность получения столь коротких импульсов является одним из факторов, ограничивающих широкое применение импульсных радиовысотомеров для измерения малых высот. Однако они могут применяться для измерения больших высот. Так, на самолете Ан-30 используется импульсный радиовысотомер типа РВ-18Ж, который применяется при аэрофотосъемочных работах. Он позволяет измерить истинную высоту до 30 000 м.
Принцип действия частотного радиовысотомера
Принцип работы частотного радиовысотомера основан на определении разности частот прямого (излучаемого) и отраженного частотно-модулированных сигналов.
Передатчик Прд (рис. 4.2), состоящий из генераторов высокой ГВЧ и низкой ГНЧ частот, формирует частотно-модулированные колебания с частотойД (рис. 4.3).
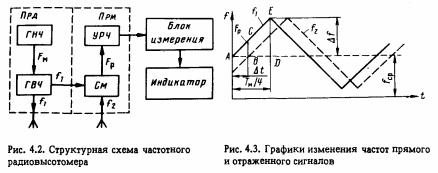
Генератор ГНЧ формирует модулирующее напряжение Fм, которое управляет частотой ВЧ сигналов генератора ГВЧ, и его средняя частота fср изменяется с девиацией частоты ± Δf. Частотномодулированные сигналы через передающую антенну излучаются в направлении земной поверхности. Одновременно сигнал передатчика частоты Д, который называют прямым или опорным (гетеродинным) сигналом, поступает на смеситель См приемника.
Отраженный от земной поверхности ВЧ сигнал частоты через приемную антенну поступает на смеситель См приемника. Он отличается от излучаемого (опорного) не только амплитудой (мощностью), но и мгновенной частотой, так как за время распространения Δt частота прямого сигнала из-за частотной модуляции изменяется на величину, пропорциональную времени Δt, а значит, и высоте полета H:
![]()
где Н — высота полета ВС; с = 3-10 м/с — скорость распространения радиоволн.
Таким образом, на смеситель приемника поступают ВЧ сигналы различных частот: прямой f1 и отраженный f2. В результате взаимодействия (смешивания и детектирования) в смесителе двух частотно-модулированных ВЧ колебаний на его выходе образуется сигнал разностной частоты Fp, который еще называют сигналом частоты биений:
![]()
Модуль разностной частоты используется в формуле потому, что частота физического процесса не может быть отрицательной.
Чем больше высота полета, тем на большее значение изменяется частота прямого сигнала, тем больше частота Fp. Таким образом, информация о высоте полета содержится в значении частоты Fp, которая изменяется пропорционально высоте полета. Поэтому в качестве блока измерения следует использовать измеритель частоты (частотомер), для нормальной работы которого напряжение частоты Fp усиливается усилителем напряжения разностной частоты УРЧ (см. рис. 4.2).
Аналитическая связь между величинами H и Fp определяется основным уравнением радиовысотомера, которое получают, рассмотрев треугольники ABC и ADE (см. рис. 4.3). Исходя из их подобия справедливо соотношение
AB/AD=BC/DE. (4.1)
Из рисунка видно, что AD = Гм/4 = 1/4 FM (TM - период частоты модуляции); АВ = Δt = 2H/с; ED = Δf и ВС = Fp. Подставив эти значения
в выражение (4.1), получим:
![]() (4.2)
(4.2)
![]() (4
3)
(4
3)
Выражениями (4.2) и (4.3) подтверждается аналитическая связь между величинами H и Fp, и их называют основным уравнением частотного радиовысотомера.
В выражениях (4.2) и (4.3) все величины, кроме H и Fp, неизменны, т.е.
![]() (4.4)
(4.4)
где К — постоянный масштабный коэффициент радиовысотомера, который показывает, на сколько герц изменяется частота Fp при изменении высоты Н на 1 м. Таким образом,
Fp=KH. . (4.5)
Из выражения (4.5) следует, что частотный радиовысотомер может быть использован для измерения сколь угодно малых высот. Это очень важно при выполнении предпосадочного маневра и посадки ВС.
В блоке измерения (измерителе частоты) частота Fp преобразуется в постоянное напряжение значения, пропорционального частоте Fp, a значит, и высоте H. Это напряжение подается на индикатор, шкалу которого градуируют в метрах.
Для измерения частоты Fp используют измерители частоты неследящего и следящего типов. Радиовысотомер с неследящим измерителем частоты называют широкополосным, а следящего типа - узкополосным. Различают следящие радиовысотомеры со следящим измерителем разностной частоты Fp и с управляемым периодом закона частотной модуляции.
Радиовысотомер с неследящим измерителем частоты Fp получил широкое распространение благодаря простоте. В схеме измерителя частоты неследящего типа (рис. 4.4) основным узлом является счетчик частоты СЧ (аналоговый), в качестве которого используют емкостный счетчик (интегратор, накопитель). Он формирует постоянное напряжение величиной, пропорциональной значению частоты Fp. Это напряжение должно зависеть только от частоты и не должно зависеть от амплитуды, поэтому перед счетчиком частоты включают амплитудный ограничитель АО, который формирует импульсное напряжение одной полярности с частотой повторения, пропорциональной значению частоты Fp. Обычно ограничитель формирует импульсы при пересечении напряжением сигнала нулевого уровня, поэтому счетчик часто называют счетчиком числа переходов через нуль (счетчик нулей). Постоянное напряжение счетчика усиливается усилителем постоянного тока УПТ и подается на индикатор, обычно стрелочный.

Рис. 4.4. Структурная схема измерителя частоты Fp (блока измерения) неследящего типа
Радиовысотомеры с измерителем частоты неследящего типа обладают рядом недостатков, главным из которых является наличие методической погрешности. Она проявляется в дискретном характере показаний индикатора высоты, обусловленном принципом работы частотного радиовысотомера при использовании гармонической (синусоидальной) и линейной (пилообразной симметричной) частотной модуляции.
Разностная частота Fp на выходе смесителя принимает дискретные значения, кратные частоте модуляции, и счетчик зафиксирует разностную частоту, кратную частоте модуляции FM, большую или меньшую, чем значение, соответствующее истинной высоте. Поэтому частота импульсов Fи на счетном каскаде будет принимать лишь дискретные значения:
![]() ,
(4.6)
,
(4.6)
где п — номер гармоники.
Выражение (4.6) будет точным только при высотах, которые соответствуют целым значениям п, т. е. когда выражение (8 Δf/с) Н равно целому числу. Значения этих высот можно определить из выражения КН = nFМ. Обозначив их через ΔН, получим
![]() .(4.7)
.(4.7)
Например, для радиовысотомера РВ-УМ К = 15,9 Гц/м, FM = 70 Гц. Полагая п = 1, 2, 3 ..., получим значение дискретности измерения высот: ДЯ = 4,4; 8,8; 13,2 м и т. д. Для радиовысотомера РВ-5 К = 200 Гц/м; FM = 150 Гц; тогда ДЯ = 0,75; 1,5; 2,25 м и т. д.
Таким образом, дискретность в измерении высоты в радиовысотомерах РВ-УМ составляет 4,4 м, РВ-5 - 0,75 м. Внутри этого интервала показания высотомера будут неустойчивыми.
Дискретность измерения высоты ДЯ называют методической погрешностью, с которой надо считаться, так как устойчиво измеряемая минимальная высота Нmin = 3 ΔH.
Используя выражение (4.6), находим
![]() (4.8)
(4.8)
Следовательно, уменьшить методическую погрешность, а значит, повысить точность измерения высоты возможно увеличением девиации частоты.
Другим недостатком радиовысотомера с неследящим измерителем частоты является использование широкополосного усилителя напряжения частоты Fp. Обычно частота Fmin находится в пределах 1...3 кГц, а частота Fpmax достигает 150...160 кГц. Вследствие этого фильтрация полезного сигнала, поступающего одновременно с помехами, осуществляется неэффективно и в целом радиовысотомер имеет невысокую помехоустойчивость и помехозащищенность и требует усложнения схемы усилителя (фильтров).
Измеритель частоты неследящего типа использован в радиовысотомерах РВ-2, РВ-ЗМ, РВ-4, РВ-5.
Радиовысотомер со следящим измерителем разностной частоты выполняют по схеме частотной автоподстройки (ЧАП).
Функциональная схема следящего измерителя частоты Fp представлена на рис. 4.5. Напряжение частотой Fp, значение которой пропорционально высоте (см. рис. 4.2), поступает на смеситель См измерителя. На него с управляемого гетеродина УГ поступает НЧ синусоидальное напряжение частотой Fr, которая медленно изменяется под действием управляющего напряжения Uу. Это напряжение формируется устройством поиска и захвата УПЗ и частотным дискриминатором ЧД- На выходе смесителя формируется напряжение промежуточной частотой Fnp =Fr - Fp. Оно усиливается усилителем УПЧ и поступает на дискриминатор ЧД.
Гетеродин
УГ
перестраивается
до тех пор, пока спектр сигнала не попадет
в полосу пропускания узкополосного
УПЧ-
Дискриминатор
формирует сигнал ошибки, значение
которой зависит от отклонения частоты
Fnp
от частоты настройки F0
контуров усилителя УПЧ-
Для
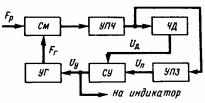
Рис. 4.5. Структурная схема следящего измерителя частоты
радиовысотомера со следящим измерителем частоты Fp характерны два основных режима работы: режим "Поиск и захват" по частоте и режим "Слежение" за частотой (или режим "Измерение"). В режиме "Поиск и захват" контур ЧАП разомкнут, и устройство УПЗ формирует управляющее напряжение, изменяющееся по пилообразному закону. При этом изменяется частота Fr гетеродина УГ и частота Fnp на выходе смесителя. Когда частота Fnp попадает в полосу захвата дискриминатора, поиск прекращается, фиксируется напряжение поиска Un устройства поиска и захвата и включается контур ЧАП. При этом напряжение дикриминатора UД вместе с зафиксированным напряжением поиска Un через суммирующее устройство СУ поступает на гетеродин УГ. Под действием суммарного управляющего напряжения Uy происходит слежение за частотой Fp. Следовательно, в этом напряжении содержится информация о высоте полета и оно может быть использовано для индикации высоты.
Схема следящего за частотой Fp измерителя не получила распространения из-за сложности схемы и невысокой помехозащищенности, особенно на малых высотах, так как ширина спектра сигналов частоты Fр меньше ширины дискриминационной характеристики канала "УПЧ-ЧД", а влияние помех типа переотражений между ВС и земной поверхностью и других паразитных сигналов существенно.
Достоинством таких измерителей является отсутствие методической погрешности в виде погрешности дискретности, что обусловлено использованием резонансного метода при измерении разностной частоты, реализованного частотным дискриминатором.
Следящий радиовысотомер с управляемым периодом закона частотной модуляции несколько отличается от рассмотренного выше. Его структурная схема представлена на рис. 4.6. Основное отличие принципа работы схемы такого радиовысотомера состоит в том, что частота Fp поддерживается постоянной во всем диапазоне измеряемых высот и равной переходной частоте Fp частотного дискриминатора. Это достигается схемой ЧАП, которая управляет периодом (длительностью рабочего хода) модуляции Тм закона частотной модуляции при постоянной девиации частоты Δf. В таком радиовысотомере применен несимметричный пилообразный закон частотной модуляции (рис. 4.7). В этом случае основное уравнение радиовысотомера принимает вид:
![]() (4.9)
(4.9)
![]() (4.10)
(4.10)
При постоянной частоте Fp выражение cFp /2Δf = К и называется масштабным коэффициентом радиовысотомера, с/м, поэтому
Н=КТМ. (4.11)
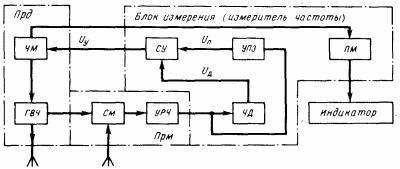
Рис. 4.6. Структурная схема следящего частотного радиовысотомера с управляемым периодом закона частотной модуляции
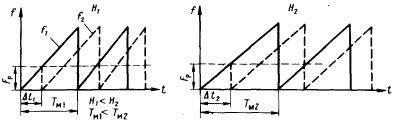
Рис. 4.7. Графики, объясняющие принцип работы следящего радиовысотомера с управляемым периодом закона частотной модуляции
Следовательно, измеряя длительность рабочего хода Тм модулирующего напряжения, можно определить текущую высоту полета. Измерение длительности рабочего хода Тм производится специальным устройством, называемым периодомером (ПМ). Он формирует постоянное напряжение, значение которого пропорционально значению Тм, а значит, и высоте полета Н, и используется в индикаторе для индикации высоты.
По структурной схеме радиовысотомер представляет замкнутую следящую систему, чувствительным элементом которой является дискриминатор частотный ЧД (см. рис. 4.6) с постоянной частотой настройки F0.
Дискриминатор вырабатывает напряжение, значение которого пропорционально отклонению средней частоты Fp спектра сигнала от частоты настройки F0. Это напряжение (сигнал погрешности) UД через суммирующее устройство СУ вместе с зафиксированным напряжением поиска UП устройства поиска и захвата поступает на частотный модулятор ЧМ. Под действием управляющего напряжения IL изменяется длительность (крутизна) рабочего хода Тм модулирующего напряжения. Это происходит до тех пор, пока частота Fp не станет равной частоте настройки дискриминатора F0. Таким образом, длительность рабочего хода Тм модулирующего напряжения пропорциональна высоте полета Н.
Устройство поиска и захвата необходимо для грубого совмещения частот Fp и F0, с помощью которой плавно изменяется длительность рабочего хода Тм до тех пор, пока сигнал частотой Fp не попадет в полосу пропускания AF дискриминатора ЧД.
В следящем радиовысотомере с управляемым периодом закона частотной модуляции во всем диапазоне измеряемых высот спектр сигналов частоты Fp находится вблизи частоты F0. Поскольку частота Fp выбирается примерно на порядок меньше Fpmax, соответствующей высоте Нтах для радиовысотомера со следящим измерителем частоты Fp, ширина спектра сигнала частоты Fp в следящем высотомере тоже на порядок меньше максимальной ширины спектра. Это позволило уменьшить ширину дискриминационной характеристики канала "УРЧ-ЧД" в следящем высотомере, а следовательно, повысить его помехоустойчивость и помехозащищенность. В нем тоже отсутствует методическая погрешность в виде погрешности дискретности.
Схема следящего радиовысотомера с управляемым периодом (длительностью рабочего хода) модуляции нашла применение в современных радиовысотомерах малых высот типов РВ-5М, А-034, А-037.