

5.2. Принципы работы бортовой аппаратуры
Измерение дальности
Наклонную дальность на ВС измеряют путем определения временного интервала между запросными и ответными сигналами с использованием метода активной радиолокации.
При измерении дальности используют оборудование (рис. 5.2): на борту - запросчик СЗД-Р, приемник АДП-Р, блок БИАД-М и пульт ПУ; на земле - наземное приемное устройство НПУ, передатчик ответных сигналов дальности ЛЯ аппаратуры РСБН-4Н, РСБН-6Н (П-20Д аппаратуры РСБН-2Н).
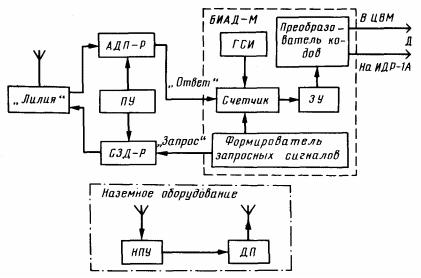
Рис. 5.2. Структурная схема канала измерения дальности
Бортовая аппаратура "Веер-М" автоматически измеряет наклонную дальность с использованием цифрового метода измерения временного интервала, который основан на определении числа счетных импульсов за интервал времени между запросными и ответными сигналами.
Принцип измерения дальности заключается в следующем: формирователем импульсов запуска передатчика схемы дальномерного канала блока БИАД-М формируются импульсы запуска (синхроимпульсы) передатчика с частотой следования F = 30±6 Гц, которые поступают на передатчик СЗД-Р. Он формирует при этом двухимпульсные кодированные радиопосылки запросных сигналов дальности, которые излучаются через антенно-фидерную систему "Лилия". Наземный приемник НПУ, работающий на частоте бортового запросчика, принимает эти сигналы, преобразует их в напряжение промежуточной частоты, усиливает, детектирует и декодирует. Выделенным одиночным видеосигналом запускается передатчик ответных сигналов дальности ДП. Он формирует двухимпульсные кодированные радиопосылки ответа дальности. Они через антеннофидерную систему "Лилия" поступают в приемник АДП-Р, который работает на частоте наземного передатчика ДП. В дальномерном канале приемника происходит преобразование принятых сигналов аналогично наземному приемнику. Выделенный в приемнике одиночный видеоимпульс является ответным сигналом дальности, который поступает в блок БИАД-М.
Кодирование радиосигналов и разнос частот передатчика и приемника (бортовых и наземных) обеспечивает высокую помехоустойчивость.
Дальномерный канал блока БИАД-М выполняет функцию цифрового (дискретного) измерителя временного интервала между запросным и ответным импульсами. Основным узлом измерителя является цифровой счетчик, который открывается одновременно с запуском передатчика и закрывается ответным импульсом. Счетные импульсы (100-метровые метки) частотой 1,5 МГц формируются стабилизированным по частоте генератором счетных импульсов ГСП. Число импульсов, прошедших во временном интервале между запросным и ответным импульсами, пропорционально дальности. Информация о дальности через запоминающее устройство и преобразователь кодов двоичным параллельным кодом выдается на индикатор ИДР-1А, а также поступает в бортовую ЦВМ в виде последовательного 32-разрядного потенциального кода.
Измерение азимута
Измерение азимута заключается в определении углового положения ВС относительно северного географического меридиана.
Информацию об азимуте задают специальные наземные радиопередатчики, который измеряется бортовой аппаратурой. В измерении азимута используют (рис. 5.3): на земле - азимутально-опорный передатчик АОП; на борту - приемник АДП-Р, блок БИАД-М и пульт ПУ.
Наземный передатчик АОП содержит передатчик азимутальных П1 (П-200 для системы РСБН-2Н) и опорных П2 (П-20А для системы РСБН-2Н) сигналов.
Передатчик азимутальных сигналов П1 предназначен для формирования сигналов азимута ВС. Он работает в режиме непрерывной генерации и нагружен на антенну, которая в горизонтальной плоскости формирует двухлепестковую диаграмму направленности. Антенна вращается с частотой 1,67 Гц (100 об/мин). В момент облучения ВС энергией высокой частоты передатчика П1 на вход приемника бортовой аппаратуры поступает радиоимпульс двойной колоколообразной формы с частотой следования 1,67 Гц и длительностью 20 мс на уровне 0,5. Двухлепестковая диаграмма направленности применена для повышения точности измерения азимута по методу минимума сигналов.
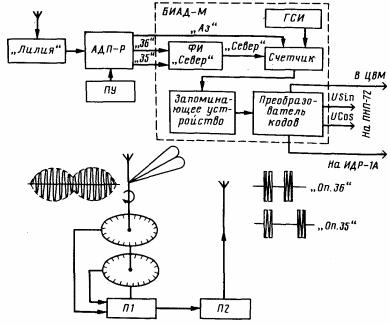
Рис. 5.3. Структурная схема канала измерения азимута
Передатчик П2 формирует опорные сигналы азимута. Он работает в импульсном режиме и нагружен на антенну, формирующую круговую диаграмму направленности. Передатчик излучает две серии импульсов с частотой следования 60 и 58,33 Гц длительностью 6 мкс. За один оборот вращения азимутальной антенны передатчика П1 передатчик П2 излучает 36 импульсов первой серии и 35 импульсов второй, поэтому их еще называют опорными сигналами "36" и "35".
В момент совмещения оси симметрии диаграммы направленности азимутальной антенны передатчика П1 в направлении северного меридиана опорные импульсы "36" и "35" совпадают во времени. Это совпадение называют северным, которое служит началом отсчета (измерения) азимута. Для этого передатчик П2 модулируется специальными датчиками, которые установлены на двух дисках, расположенных на оси азимутальной антенны. На одном диске расположено 36 магнитоэлектрических датчиков, на другом - 35. Причем при начальной установке антенн их располагают таким образом, чтобы датчики совпадали только в тот момент, когда ось симметрии диаграммы направленности передатчика П1 сориентирована в направлении северного меридиана. Так как диаграмма направленности антенны передатчика П2 круговая, опорные сигналы, а следовательно, и сигнал "северного направления" принимаются бортовой аппаратурой всех ВС, находящихся в зоне действия наземных передатчиков, одновременно. Для получения азимутального импульса требуется повернуть антенну передатчика П1 на угол, пропорциональный азимуту ВС. Таким образом, информация об азимуте содержится во временном интервале между импульсами "северного направления" и азимутальным, который измеряется бортовой аппаратурой.
Азимутальные и опорные сигналы через антенно-фидерную систему "Лилия" поступают в приемник АДП-Р. В азимутальном канале приемника эти радиосигналы преобразуются в одиночные видеоимпульсы: азимутальный, опорные "36" и "35", которые поступают в блок БИАД-М. В азимутальном канале блока измеряется временной интервал между импульсами "северного направления" и азимутальными. Для его измерения в канале азимута применен цифровой (дискретный) измеритель. Цифровой метод измерения азимута основан на определении числа счетных импульсов за интервал времени между "северным" и азимутальным импульсами. Счетные импульсы формируются специальным генератором счетных импульсов ГСП, который выдает кратковременные импульсы частотой 6 кГц, что соответствует 0, Г (время поворота антенн азимутального передатчика на Г составляет 1,67 мс). Счетчик управляется импульсами "северного направления" и азимутальными. Импульс "северного направления" формируется формирователем импульса "Север" (ФИ "Север"). Этим импульсом открывается счетчик и на него поступают счетные импульсы с дискретностью 0, Г. Азимутальным импульсом счетчик закрывается, и поэтому число счетных импульсов за время счета пропорционально азимуту ВС.
Информация об азимуте в виде двоичного кода через запоминающее устройство поступает на преобразователь кодов. В нем код азимута преобразуется в синусно-косинусное напряжение частотой 400 Гц, которое подается на стрелочный индикатор прибора ПНП-72. Кроме того, информация об азимуте в виде последовательного 32-разрядного потенциального кода поступает в бортовую ЦВМ и в виде параллельного кода может быть использована в индикаторе ИПР-1А.
Измерение координат ВС наземным оборудованием
Система РСБН позволяет определить координаты ВС наземным оборудованием с их индикацией на экране индикатора кругового обзора ИКО наземного радиомаяка или выносном индикаторе ВИКО и опознавание ВС, работающих с данными наземными радиомаяками. При определении координат наземное оборудование выполняет функцию запросчика, а бортовая - ответчика.
При определении координат ВС по индикатору ИКО используют (рис. 5.4) на земле - передатчик ДП, наземный приемник и индикатор ИКО, на ВС - приемник АДП-Р, передатчик (ответчик) СЗД-Р.

Рис. 5.4. Структурная схема наземной индикации координат
Передатчик ДП формирует трехимпульсные кодированные радиосигналы с частотой следования 300 Гц - сигналы запроса наземной индикации ЗНИ. Синхронизация передатчика ДП осуществляется за счет вращения азимутальной антенны передатчика П1. Через каждые 2° поворота азимутальной антенны на передатчик поступает импульс синхронизации. Для этого на оси азимутальной антенны расположены 180 магнитоэлектрических датчиков, и поэтому за один оборот антенны получается 180 импульсов, а частота следования составит 300 Гц (1,67x180). Одновременно с запуском передатчика ДП запускается радиальная развертка индикатора ИКО. Сигналы ЗНИ излучаются всенаправленной антенной передатчика ДП и через систему АФС "Лилия" бортовой аппаратуры поступают на приемник АДП-Р, который преобразует их в одиночные видеоимпульсы. Этими импульсами запускается передатчик СЗД-Р. Но импульс запуска передатчика формируется только при наличии азимутального импульса, поэтому частота следования импульсов запуска передатчика будет равна 1,67 Гц. Передатчик СЗД-Р формирует трехимпульсные радиосигналы - сигналы ответа наземной индикации ОНИ. Они принимаются наземным приемником, где выделяется одиночный видеосигнал ОНИ, который поступает на индикатор ИКО, вызывая яркостную отметку, удаленную от центра экрана на расстояние, пропорциональное наклонной дальности Д воздушного судна от маяка.
Круговая развертка синхронна с вращением азимутальной антенны, и поэтому угловое положение яркостной отметки соответствует азимуту ВС, так как передатчик СЗД-Р формирует сигнал ОНИ в тот момент, когда азимутальная антенна ориентирована на ВС.
Для опознавания ВС по команде наземного диспетчера через командную радиостанцию на борту нажимается кнопка "Опознавание". При этом передатчик СЗД-Р формирует сдвоенные с интервалом 50... 100 мкс трехимпульсные сигналы ОНИ. На экране индикатора ИКО появляется сдвоенная яркостная отметка данного ВС.
Для опознавания наземного радиомаяка бортовым оборудованием сигналы ЗНИ манипулируются азбукой Морзе (точки-тире), которые после декодирования в приемнике АДП-Р идут через устройство СПУ на телефоны и будут прослушиваться тоном частотой 300 Гц.
При наземной индикации координат может использоваться и выносной индикатор ВИКО, состоящий из приемного устройства ПУ и индикатора ИКО. Отличительной особенностью является то, что приемное устройство принимает сигналы ЗНИ передатчика ДП, опорные "35" и "36" передатчика П2. Опорные сигналы используются для создания круговой развертки, а сигналы ЗНИ - радиальной развертки на экране ИКО. Круговая развертка синхронна с вращением азимутальной антенны. Сигналы ОНИ ретранслируются передатчиком ДП, поступают на устройство ПУ и создают затем на экране ИКО яркостную отметку аналогично индикатору ИКО радиомаяка.
Работа бортовой аппаратуры в режиме "Посадка"
Бортовая аппаратура "Веер-М" совместно с радиомаяками ПРМГ-4 ("Катет-С") позволяет формировать сигналы отклонения ±εк от линии (зоны) курса и сигналы отклонения ±εг от линии (зоны) глиссады при посадке ВС, а также измерить наклонную дальность до точки приземления.
Посадочная радиомаячная группа "Катет-С" состоит из курсового КРМ-4, глиссадного ГРМ-4 радиомаяков и ретранслятора-дальномера РД-4. Размещение радиомаяков показано на рис. 5.5, а.
Радиомаяк КРМ-4 задает линию курса посадки. Работает на несущей частоте азимутального канала радиомаяков системы РСБН в импульсном режиме. Его антенны формируют двухлепестковую взаимно пересекающуюся диаграмму направленности (см. рис. 5.5, а). Модуляция несущей частоты амплитудная, в одном лепестке (справа) модулируется импульсным напряжением с частотой следования 2100 Гц, в другом 1300 Гц, причем антенны, а следовательно, и диаграммы коммутируются с частотой 13 Гц.
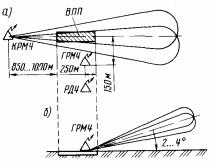
Рис. 5.5. Размещение радиомаячной группы ПРМГ-4, диаграммы направленности антенн курсового КРМ-4 (а) и глиссадного ГРМ-4 (б) радиомаяков
По линии, совпадающей с осью ВПП, коэффициенты глубин модуляции одинаковы, а коэффициент разнослышимости КРС (разность глубин модуляции) равен нулю и изменяется вправо и влево от оси ВПП. Маяк формирует курсовой сектор 4.„6°, ограниченный геометрическими местами точек, в которых коэффициент КРС равен 33 %. Зона действия маяка в горизонтальной плоскости составляет ±15°, а дальность действия зависит от высоты полета и составляет 180 км при высоте полета 10 000 м и 20 км при высоте полета 300 м.
Радиомаяк ГРМ-4 задает линию (зону) глиссады. Он работает на частоте дальномерного канала и нагружен на антенну, формирующую в вертикальной плоскости двухлепестковую взаимно пересекающуюся диаграмму направленности, наклонную к плоскости горизонта под углом 2...4° (рис. 5.5, б). Несущая частота модулируется по амплитуде импульсным напряжением в верхнем лепестке диаграммы частотой 1300 Гц и в нижнем 2100 Гц.
Диаграммы взаимно пересекаются и создают равносигнальную зону, в пределах которой по линии глиссады коэффициенты глубин модуляции одинаковы, а коэффициент КРС равен нулю и изменяется вверх и вниз от линии глиссады.
Маяк ГРМ-4 формирует сектор глиссады, равный примерно Г. Дальность действия маяка составляет 20 км при высоте полета 300 м и 80 км при высоте полета 1000 м.
Ретранслятор РД-4 предназначен для ответа дальности на запрос бортовой аппаратуры "Веер-М" в режиме "Посадка" и состоит из приемного устройства и передатчика ответных сигналов. Дальность действия ретранслятора РД-4 составляет 20 км при высоте полета 300 м и 45 км при высоте полета 2000 м.
Структурная схема бортовой аппаратуры в режиме "Посадка" приведена на рис. 5.6.
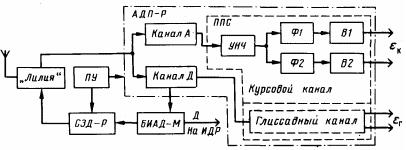
Рис. 5.6. Структурная схема бортовой аппаратуры в режиме "Посадка"
Сигналы маяков КРМ-4 и ГРМ-4 через антенно-фидерную систему "Лилия" поступают в приемник АДП-Р. Сигналы маяка КРМ-4 приходят через ВЧ канал азимута, а ГРМ-4 - дальности. На их выходах формируются сигналы частотой 2100 и 1300 Гц, которые поступают на преобразователь посадочных сигналов ППС. Он содержит каналы курса и глиссады, каждый из которых содержит усилители УНЧ, фильтры Ф1 и Ф2, настроенные на частоты 2100 и 1300 Гц, и выпрямители В1 и В2, к нагрузкам которых подключаются глиссадная и курсовая стрелки приборов ПНП. Выпрямители формируют сигналы отклонения +εк и ±εг сравнивая амплитуды сигналов частотой 2100 и 1300 Гц.
Дальность до точки приземления измеряется аналогично режиму "Навигация".
Работа бортовой аппаратуры в системе встроенного контроля
Бортовая аппаратура охвачена системой встроенного контроля, которая позволяет проверить работоспособность аппаратуры в режимах "Навигация" и "Посадка" и в случае неисправности определить ее функциональное местонахождение с точностью до блока. Функциональная схема встроенного контроля и индикации исправности бортовой аппаратуры представлена на рис. 5.7.
Режим "Навигация" или "Посадка" устанавливается внешней ручкой 6 переключателя частотно-кодированных каналов (рис. 5.8) пульта управления. Питание включается переключателем 4.
В первом положении этого переключателя на шкале 3 каналов в старшем разряде номера канала индицируется цифра "0" и бортовая аппаратура может работать в режиме "Навигация" с всенаправленными маяками РСБН-2Н, РСБН-4Н, РСБН-6Н.
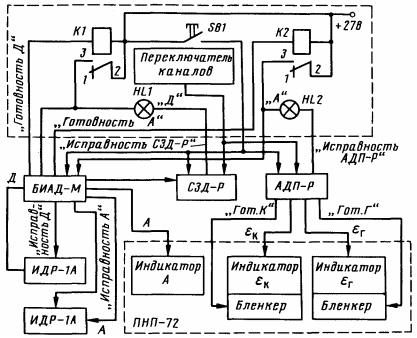
Рис. 5.7. Структурная схема встроенного контроля работоспособности
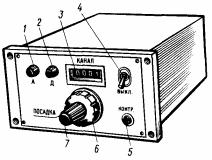
Рис. 5.8. Пулы управления бортовой аппаратуры "Веер-М"
Во втором положении ручки переключателя на шкале каналов в старшем разряде номера каналов индицируется цифра "1" и бортовая аппаратура может работать в режиме "Навигация" с направленными специальными наземными радиомаяками, в которых вся информация передается и принимается через направленную вращающуюся антенну азимутального передатчика.
Третье положение ручки переключателя каналов резервное. В четвертом положении ручки переключателя на шкале каналов индицируется буква П и бортовая аппаратура может работать в режиме "Посадка" с маяками "Катет".
Номер частотно-кодового канала устанавливают внутренней ручкой 7 переключателя каналов. Для проверки аппаратуры в режиме "Навигация" с использованием системы встроенного контроля переключателем каналов пульта управления устанавливают режим "Навигация", любой канал и нажимают кнопку 5 SB1 "Контроль". При этом в блоки БИАД-М, СЗД-Р и АДП-Р (см. рис. 5.7) поступает сигнал "Контроль А и Д" в виде напряжения +27 В.
В блоках СЗД-Р и АДП-Р по этому сигналу вырабатываются сигналы "Исправность СЗД-Р" и "Исправность АДП-Р", которые поступают в пульт управления на лампы НL1"Д" НL2"А" соответственно.
По сигналу "Контроль А и Д" в дальномерном канале блока БИАД-М вместо ответного импульса используется контрольный, задержанный от импульса запроса на время, пропорциональное дальности 496 км. Задержанный импульс (контрольный) формируется специальной схемой дальномерного канала. Контрольное значение дальности выдается на индикатор ИДР-1А.
В азимутальном канале блока БИАД-М по сигналу "Контроль А и Д" формируется вместо азимутального импульса контрольный, задержанный от импульса "Север" на 6,9°. Контрольное значение азимута выдается на прибор ПНП-72.
Кроме контрольных значений дальности и азимута, в блоке БИАД-М формируются сигналы "Готовность Д" и "Готовность А", которые поступают в пульт управления.
В пульте управления при нажатой кнопке SB1 по сигналу "Готовность Д" срабатывает реле К1, замыкая контакты 2-3 и напряжение +27 В в качестве сигнала "Исправность Д" поступает на лампу 2 HL1 "Д" с зеленым светофильтром. Она загорается только при наличии сигнала "Исправность СЗД-Р". Одновременно сигнал "Исправность Д" поступает на бленкер индикатора ИДР-1А, который убирается со шкалы индикатора. Показания индикатора ИДР-1А должны соответствовать значению дальности (496 ±0,2) км.
Таким образом, горение лампы HL1 "Д", убранный бленкер ИДР-1А и контрольное значение дальности на шкале индикатора являются признаком исправности бортовой аппаратуры по каналу дальности.
По сигналу "Готовность А" в пульте управления срабатывает реле К2 и напряжение +27 В в качестве сигнала "Исправность А" поступает на лампу 1 HL2 "А", а также может использоваться для бленкера прибора ИДР-1А при его применении в качестве индикатора азимута (самолет Ан-26, вертолет Ми-26). Кроме этого, сигнал "Исправность А" поступает в антенно-фидерную систему "Лилия". Лампа HL2 "А" загорается только при наличии сигнала "Исправность АДП-Р". 11а индикаторе должно быть зафиксировано контрольное значение азимута (6,9±0,1)° по индикатору ИДР-1А и (6,9±2,5)° по индикатору прибора ПНП-72.
Таким образом, горение лампы HL2 "А" с зеленым светофильтром, убранный бленкер индикатора азимута типа ИДР-1А и контрольное значение азимута по шкале приборов ПНП-72 и ИДР-1А свидетельствуют о исправности бортовой аппаратуры по азимутальному каналу.
В режиме "Посадка" встроенный контроль исправности бортовой аппаратуры осуществляется следующим образом: на пульте управления устанавливают любой канал от П001 до П040 и нажимают кнопку SB1 "Контроль". При этом в блоки СЗД-Р, АДП-Р и БИАД-М поступает сигнал "Контроль" и "Посадка" - в блок АДП-Р. Проверку исправности дальномерного канала производят аналогично режиму "Навигация". Проверка исправности азимутального канала в режиме "Посадка" не производится.
Сигналами "Контроль" и "Посадка" в блоке АДП-Р вырабатываются сигналы "Исправность АДП-Р" и "Готовность" по курсовому и глиссадному каналам "Гот.К" к "Гот.Г", а также сигналы отклонения от линии курса ±εк и глиссады ±εг. Сигналы "Гот.К" и "Гот.Г" поступают на бленкеры "К" и "Г" прибора ПНП-72, которые убираются, и на лампы "К" и "Г" селектора режимов аппаратуры "Курс МП-70" (самолет Як-42). Кроме того, сигнал "Гот.К" поступает в антенно-фидерную систему "Лилия".
Сигналы отклонения ±εк и ±εг поступают на курсовую и глиссадную стрелки (планки) прибора ПНП-72, вызывая их отклонение вправо и вверх на величину, соответствующую токам отклонения при сигналах от маяков "Катет-С" с коэффициентами КРС, равными 20 % по обоим каналам.