

3.3. Принцип работы в режимах "навигация" и "контроль"
Краткая характеристика радиомаяка VOR
Задачи, решаемые бортовой аппаратурой в режиме "Навигация" (в дальнейшем "VOR"), изложены в § 3.1. Основной задачей является измерение азимута (магнитного пеленга) на радиомаяк (AM), т. е. угла в горизонтальной плоскости между направлением магнитного меридиана, проходящего через центр тяжести ВС, и направлением на радиомаяк.
Всенаправленный радиомаяк VOR международной системы входит в состав азимутально-дальномерной системы ближней радионавигации, которая принята странами - членами ICAO в качестве стандартной системы. Ее азимутальную часть составляют радиомаяки VOR, a дальномерную - DME (distance measuring eguipment, что означает - оборудование измерения дальности).
Радиомаяк VOR предназначен для задания информации о азимуте ВС, работает в диапазоне 108…117,95 МГц и выпускается в двух вариантах: категории А с дальностью действия до 370 км и категории В до 46 км. На несущей частоте он излучает сигналы опорной и переменной фаз частотой 30 Гц. Сигнал опорной фазы излучается антенной, которая формирует круговую диаграмму направленности 2 (рис. 3.14), и фаза его (30 Гц) во всех направлениях относительно маяка постоянна. Несущая частота сигнала опорной фазы модулируется по амплитуде напряжением поднесущей частотой 9960 Гц, которая в свою очередь модулирована по частоте напряжением частотой 30 Гц с девиацией частоты Δf = ±480 Гц.
Сигнал переменной фазы излучается антенной, которая формирует диаграмму направленности 1 в виде восьмерки и вращается с частотой 30 об/с (30 Гц). Он амплитудно-модулирован напряжением частотой 30 Гц. За один оборот вращения антенны фаза сигнала переменной фазы изменяется от 0 до 360°. Радиомаяк регулируется так, чтобы в направлении на магнитный меридиан, проходящий через место установки радиомаяка, сигналы опорной Uоф и переменной Uпф фаз совпадали, а в других азимутальных положениях отличались бы по фазе. Диаграммы направленности антенн обоих сигналов в пространстве складываются, образуя результирующую 3 с максимумом излучения в направлении 1 на магнитный меридиан. Совпадение фаз сигналов в направлении на магнитный меридиан является началом отсчета. В этом направлении фазовый сдвиг φ равен нулю, в других направлениях (II-IV)
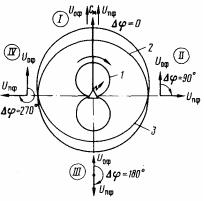
Рис. 3.14. Диаграмма направленности антенн радиомаяка VOR
изменяется от 0 до 360 . Таким образом, информация об азимуте самолета содержится в фазовом сдвиге между сигналами опорной и переменной фаз, азимут AM определяется соотношением AM = АС ±180°.
Для опознавания маяков VOR несущая частота манипулируется кодом Морзе сигналом частотой 1020 Гц. Позывные сигналы могут передаваться и голосом с помощью магнитной записи. Кроме того, на несущей частоте может передаваться и сообщение на ВС.
Структурная схема бортовой аппаратуры представлена на рис. 3.15. Высокочастотные сигналы маяка VOR через антенну поступают в устройство УНП на блок БВЧК, который с помощью пульта управления настраивается на частоту радиомаяка VOR. В блоке БВЧК сигналы опорной и переменной фаз усиливаются, преобразуются и детектируются. На нагрузке амплитудного детектора выделяется сигнал переменной фазы Uпф частотой 30 Гц, сигнал опорной фазы Uоф, представляющий собой частотно-модулированное колебание частотой 9960 Гц, модулированное по частоте напряжением частотой 30 Гц, и сигналы опознавания частотой 1020 Гц. Они поступают в блок БНЧК. В блоке БНЧК посредством фильтра 10 кГц и частотного детектора (ЧД) выделяется сигнал Uоф частотой 30 Гц, который поступает в следящий (автоматический) и через селектор курса (СК) в селекторный (ручной) каналы. На эти каналы поступает и сигнал Uпф частотой 30 Гц. Кроме того, сигналы Uоф и Uпф используются в устройстве индикации "На-От".
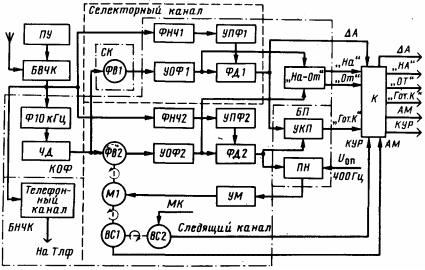
Рис. 3.15. Структурная схема бортовой аппаратуры в режиме "VOR"
Следящий канал измеряет азимут маяка посредством измерения фазового сдвига между сигналами Uоф и Uпф частотой 30 Гц.
Основным элементом канала является фазовый детектор (фазочувствительный выпрямитель) ФД2. На него через усилитель сигнала опорной фазы УОФ2 поступает сигнал Uоф, причем он поступает через фазовращатель ФВ2, который управляется двигателем M1. Фаза выходного напряжения фазовращателя пропорциональна углу поворота его ротора. Кроме того, на детектор ФД2 поступает и сигнал Uпф, который выделяется фильтром ФНЧ2 и усиливается усилителем сигнала переменной фазы УПФ2.
Детектор ФД2 формирует напряжение ± Uу, значение которого зависит от фазового сдвига между сигналами Uоф и Uпф, т. е. от азимута AM. Это напряжение преобразуется преобразователем напряжения ПН в переменное частотой 400 Гц соответствующей фазы и амплитуды, которое усиливается усилителем мощности и поступает на двигатель M1. Если ВС находится в направлении на магнитный меридиан, фазовый сдвиг между сигналами Uоф и Uпф равен нулю, равно нулю напряжение Uу на нагрузке детектора ФД2, и двигатель не отрабатывает. При другом азимутальном положении ВС детектор формирует напряжение ±Uy. которое преобразуется в напряжение частотой 400 Гц, и оно после усиления поступает на двигатель M1. При его вращении изменяется угловое положение ротора фазовращателя, что приводит к изменению фазы сигнала Uоф. Это происходит до тех пор, пока его фаза не совпадет с фазой сигнала Uпф и напряжение ±Uy не станет равным нулю. Таким образом, угол поворота двигателя M1 и ротора фазовращателя пропорционален фазовому сдвигу между сигналами опорной и переменной фаз, т. е. азимуту.
Информация об азимуте от датчика ВС1 типа БСКТ поступает через устройство К на индикаторы ПНП. Одновременно в следящем канале определяется угол КУР (рис. 3.16, а) путем алгебраического сложения (вычитания) азимута AM и курса МК (КУР = AM - МК). Для этого используется дифференциальный датчик ВС2 типа БСКТ, ротор которого поворачивается двигателем на угол, пропорциональный азимуту AM. Статорная обмотка соединена с датчиком курсовой системы или устройства, измеряющих МК (БГМК-2 - блок гиромагнитного компаса самолета Ту-154М и БСФК-1 - базовая система формирования курса самолета Як-42). В роторной обмотке датчика ВС2 формируется напряжение, пропорциональное КУР, информация о котором передается в РМИ (радиомагнитный индикатор) и ПНП-72.
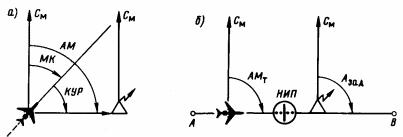
Рис. 3.16. Определение КУР (а) и полет ВС по заданному азимуту (б)
Селекторный канал (см. рис. 3.15) определяет угловое (боковое) отклонение ΔА ВС от линии заданного пути (проходящей через маяк (рис. 3.16, б), которая задается вручную заданным азимутом Азад. Принцип работы основан на сравнении азимута Азад линии пути и текущего азимута на маяк АМТ. Такое сравнение происходит в детекторе ФД1, на который поступает сигнал Uпф содержащий информацию о текущем азимуте АМТ, и сигнал Uоф, поступающей через фазовращатель ФВ1. Он конструктивно находится в селекторе курса СКу управляется ручкой "Курс" (см. рис. 3.5) и содержит информацию о заданном азимуте Азад линии пути. При полете ВС по линии ЛЗП азимуты АМТ и Азад одинаковы и напряжение ±Uy детектора ФД1, пропорциональное отклонению ДА, равно нулю. При отклонении ВС изменяется азимут АМТ и напряжение ±Uу. Сигнал отклонения А через устройство К поступает на приборы ПНП и системы автоматического управления (САУ-42, АБСУ-154).
Устройство непрерывного контроля параметров (УКП) формирует сигнал готовности "Гот.К" в виде напряжения +27 В. На него поступают напряжения Uy с детектором ФД1 и ФД2 селекторного и следящего каналов, где они сравниваются, и при нормальной работе бортовой аппаратуры выдается сигнал "Гот.К". Он через устройство коммутации К поступает на бленкеры "К" приборов ПНП, лампы "Kl", "K2" селектора режимов и систему АФС "Лилия" самолета Як-42.
Устройство индикации - "На-От" осуществляет визуальную сигнализацию полета на маяк и от него. Оно управляется сигналами Uоф частотой 30 Гц селекторного (Азад) и следящего (АМТ) каналов, которые снимаются после фазовращателей этих каналов. При полете на маяк эти сигналы синфазны и устройство выдает напряжение сигнализации "На" в виде напряжения +27 В. При пролете маяка азимут AM,, изменяется на 180°, поэтому изменяется фаза сигнала Uоф следящего канала на 180° и на входе устройства "На-От" сигналы Uоф обоих каналов будут в противофазе, оно выдает напряжение для сигнализации "От". В качестве сигнализаторов используются светосигнализаторы "На" и "От" (самолет Ту-154М) и указатели направления полета с символами "А" (На) и "V" (От) приборов ПНП в виде двухполярного магнитоэлектрического индикаторного индекса.
В блоке БНЧК отдельные каскады и фазовые детекторы используются в режиме "VOR" и "Посадка" при контроле линии курса посадки в системах СП-50М, СП-68 (см. § 3.2). Фазовый детектор следящего (автоматического) канала в режиме "Посадка" используется в контрольном, селекторного (ручного) - в основном каналах. Коммутация детекторов осуществляется специальными схемами - коммутаторами. Телефонный канал режима "VOR" общий с курсовым каналом режима "Посадка".
Для использования бортовой аппаратуры в режиме "VOR" на пульте управления устанавливают частоту маяка VOR и селектором курса вводят требуемый азимут линии заданного пути.
Встроенный контроль работоспособности
Встроенный
контроль работоспособности бортовой
аппаратуры необходим для проверки ее
работоспособности как в полете, так и
на земле в режимах "Посадка" и "VOR"
без использования наземных радиомаяков
и контрольно-поверочной аппаратуры.
Контроль производится с пультов ПУ, на
которых находятся кнопки с символами
"![]() "
"
"
"![]() ",
"
",
"![]() "
(см.рис. 3.5). При их нажатии выдается
команда встроенного контроля в устройства
УНП, приемник РПМ-70 и блок БВК
(рис.
3.17). В блоках БВЧК, БВЧГ устройства УНЕ
включаются
специальные контрольные генераторы
ВЧ, которые используются для формирования
требуемых частот, установленных на
пульте управления, имитирующие ВЧ
сигналы наземных маяков. Блок БВК
формирует
низкочастотные сигналы отклонения
от линии курса посадки, глиссады и сигнал
имитации азимута в зависимости от режима
работы и выбранной системы посадки. В
приемнике РПМ-70 включается контрольный
ВЧ генератор и один из трех НЧ генераторов
(400,1300 или 3000 Гц), имитирующих сигналы
МРМ.
"
(см.рис. 3.5). При их нажатии выдается
команда встроенного контроля в устройства
УНП, приемник РПМ-70 и блок БВК
(рис.
3.17). В блоках БВЧК, БВЧГ устройства УНЕ
включаются
специальные контрольные генераторы
ВЧ, которые используются для формирования
требуемых частот, установленных на
пульте управления, имитирующие ВЧ
сигналы наземных маяков. Блок БВК
формирует
низкочастотные сигналы отклонения
от линии курса посадки, глиссады и сигнал
имитации азимута в зависимости от режима
работы и выбранной системы посадки. В
приемнике РПМ-70 включается контрольный
ВЧ генератор и один из трех НЧ генераторов
(400,1300 или 3000 Гц), имитирующих сигналы
МРМ.
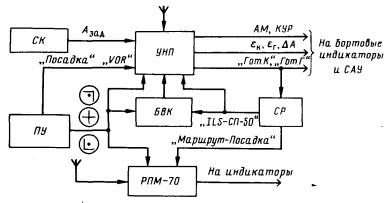
Рис. 3.17. Структурная схема системы встроенного контроля работоспособности
При нажатии одной из кнопок в режиме "Посадка" курсовые и глиссадные стрелки (планки) бортовых индикаторов должны занимать положение, указанное символами на кнопках. Одновременно выдается сигнал "Гот.К" и "Гот.Г" на бленкеры "К" и "Г" приборов ПНП и лампы "Kl, K2" и "П, Г2" селектора режимов. При нажатии средней кнопки " " в режиме "VOR" индикатор азимута должен показать значение (0±2)°, а при нажатии любой крайней-(180±2)°. Причем при установленном на селекторе курса заданном азимуте 0" при нажатии средней кнопки срабатывает устройство индикации "На", при нажатии крайних - "От".
В маркерном канале левая кнопка служит для включения сигналов имитации пролета дальнего маяка МРМ, средняя - среднего, правая - ближнего. При нажатии кнопок должны загореться соответствующие светосигнализаторы и в телефонах прослушиваться тон частотой 400, 1300 или 3000 Гц. Проверка производится раздельно для каждого полукомплекта со своего пульта управления и селектора курса.