Работа и энергия. Мощность.
Работа – это скалярная величина.
![]()
![]()
[A]= Дж
Энергия – это физическая величина, характеризующая способность тела совершать работу.[Е]= Дж
Любое тело обладает скоростью и обладает кинетической энергией:
![]()
Потенциальная энергия:
![]()
![]()
![]()
![]()
Мощность – это скорость выполнения работы
![]()
![]()
[N] = Вт
Консервативные силы. Потенциальные поля.
Консервативные силы – при действии которых на систему ее механической энергии сохраняется такие силы характеризуются тем, что их работа не зависит от формы траектории, а определяется только начальными и конечным положение точки. Работа таких сил по замкнутой траектории = 0.
Консервативные
силы: ![]()
Диссипативные
силы: ![]()
Поле, в котором действуют консервативные силы называется потенциальным полем.
Потенциальная энергия. Связь силы и потенциальной энергии.
Потенциальная энергия— скалярная физическая величина, характеризующая способность некоего тела совершать работу за счет его нахождения в поле действия сил. Eп = mgh, [E] = Дж.
Связь между потенциальной энергией и силой
Каждой
точке потенциального поля соответствует,
с одной стороны, некоторое значение
вектора силы
![]() ,
действующей на тело, и, с другой стороны,
некоторое значение потенциальной
энергии
,
действующей на тело, и, с другой стороны,
некоторое значение потенциальной
энергии
![]() .
Следовательно, между силой и потенциальной
энергией должна существовать определенная
связь.
.
Следовательно, между силой и потенциальной
энергией должна существовать определенная
связь.
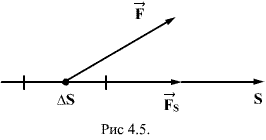
Для установления этой связи вычислим элементарную работу ∆А, совершаемую силами поля при малом перемещении ∆S тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой S. Эта работа равна
∆А=FsdS
где Fs- проекция силы на направление S.
Поскольку в данном случае работа совершается за счет запаса потенциальной энергии Wx’, она равна убыли потенциальной энергии –Wx’ на отрезке оси ∆S:
∆А=–Wx’
Из двух последних выражений получаем
FsdS=–Wx’
Откуда
![]()
Последнее выражение дает среднее значение Fs на отрезке ∆S. Чтобы получить значение Fs в точке нужно произвести предельный переход:
![]()
Так как Wx’ может изменяться не только при перемещении вдоль оси S, но также и при перемещениях вдоль других направлений, предел в этой формул представляет робой так называемую частную производную от Wx’ по S:
![]()
Это соотношение справедливо для любого направления в пространстве, в частности и для направлений декартовых координатных осей х, у, z:
![]()
Эта формула определяет проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:
![]() в
математике вектор
в
математике вектор
![]() ,
,
где
а - скалярная функция х, у, z, называется
градиентом этого скаляра обозначается
символом
![]() .
Следовательно, сила равна градиенту
потенциальной энергии, взятого с обратным
знаком
.
Следовательно, сила равна градиенту
потенциальной энергии, взятого с обратным
знаком ![]()
Силы в механике. Упругая сила.
В современной физике различают четыре вида взаимодействий:
Гравитационное (взаимодействие, обусловленное всемирным тяготением)
Электромагнитное (осуществляется через электрические и магнитные поля)
Сильное или ядерное (обеспечивает связь частиц в атомном ядре)
Слабое (ответственное за многие процессы распада элементарных частиц)
В
рамках классической механики имеют
дело с гравитационными и электромагнитными
силами, а так же с упругими силами и
силами трения. Два последних вида сил
определяются характером взаимодействия
между молекулами вещества. Силы
взаимодействия между молекулами имеют
электромагнитное происхождение.
Следовательно, упругие силы и силы
трения являются по своей природе
электромагнитными. Гравитационный и
электромагнитные силы являются
фундаментальными – их нельзя свести к
другим, более простым, силам. Законы
фундаментальных сил чрезвычайно просты.
Гравитационная сила определяется
формулой ![]() ,
сила, с которой взаимодействуют два
покоящихся точечных заряда
,
сила, с которой взаимодействуют два
покоящихся точечных заряда ![]() и
и ![]() ,
дается законом Кулона
,
дается законом Кулона ![]() .
Если заряды движутся, то кроме кулоновской
формулы, на них так же распространяются
магнитные силы. Магнитная сила, действующая
на точечный заряд q,
движущийся со скоростью
.
Если заряды движутся, то кроме кулоновской
формулы, на них так же распространяются
магнитные силы. Магнитная сила, действующая
на точечный заряд q,
движущийся со скоростью ![]() в магнитном поле с индукцией B,
определяется формулой
в магнитном поле с индукцией B,
определяется формулой ![]() .
Выше перечисленные формулы являются
точными.
.
Выше перечисленные формулы являются
точными.
Упругие силы. Всякое реальное тело под действием приложенных к нему сил деформируется, т.е. изменяет свои размеры и форму. Если после прекращения действия сил тело принимает первоначальные размеры и форму, деформация называется упругой. Упругие деформации наблюдаются в том случае, если сила, обусловившая деформацию, не превосходит некоторый, определенный для каждого конкретного тела предел (предел упругости) Рассмотрим упругие деформации. В деформированном теле возникают упругие силы, уравновешивающие внешние силы. Под действием внешней силы – Fвн пружина получает удлинение x, в результате в ней возникает упругая сила – Fупр, уравновешивающая Fвн.
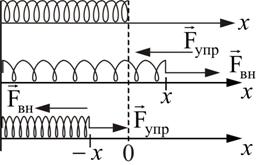
Упругие силы возникают во всей деформированной пружине. Любая часть пружины действует на другую часть с силой упругости Fупр.
Удлинение пружины пропорционально внешней силе и определяется законом Гука:
|
|
k – жесткость пружины. Видно, что чем больше k, тем меньшее удлинение получит пружина под действием данной силы. Так как упругая сила отличается от внешней только знаком, т.е. Fупр = –Fвн, закон Гука можно записать в виде
![]() ,
Fупр = –kx.
,
Fупр = –kx.
Потенциальная энергия упругой пружины равна работе, совершенной над пружиной. Так как сила непостоянна, элементарная работа dA = F dx, или
dA = –kx dx.
Тогда полная работа, которая совершена пружиной, равна: