

10. Ускорение Кориолиса и определение его по правилу Жуковского.
.
Ускорение называют ускорением Кориолиса. Ввиду того, что ускорение Кориолиса появляется в случае вращения подвижной системы отсчета, его называют еще поворотным ускорением.
С физической точки зрения появление поворотного ускорения точки объясняется взаимным влиянием переносного и относительного движений.
Итак, ускорение Кориолиса точки равно по модулю и направлению удвоенному векторному произведению угловой скорости переносного движения на относительную скорость точки.
Для
определения направления
![]() можно также пользоваться следующим
правилом Н. Е. Жуковского: чтобы
получить направление поворотного
ускорения
,
достаточно составляющую
можно также пользоваться следующим
правилом Н. Е. Жуковского: чтобы
получить направление поворотного
ускорения
,
достаточно составляющую
![]() относительной скорости
точки М, перпендикулярную к вектору
,
повернуть (в плоскости, перпендикулярной
к вектору
)
на прямой угол вокруг точки М в направлении
переносного вращения (рис.51).
относительной скорости
точки М, перпендикулярную к вектору
,
повернуть (в плоскости, перпендикулярной
к вектору
)
на прямой угол вокруг точки М в направлении
переносного вращения (рис.51).
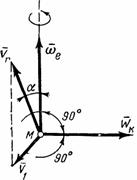
Рис.51
Если
переносное движение подвижной системы
отсчета есть поступательное движение,
то
![]() и поэтому поворотное ускорение
и поэтому поворотное ускорение
![]() точки также равно нулю. Поворотное
ускорение равно, очевидно, нулю и в том
случае, когда
в данный момент времени обращается в
нуль.
точки также равно нулю. Поворотное
ускорение равно, очевидно, нулю и в том
случае, когда
в данный момент времени обращается в
нуль.
Кроме того, поворотное ускорение точки может, очевидно, обращаться в нуль, если:
а) вектор относительной скорости точки параллелен вектору угловой скорости переносного вращения, т.е. относительное движение точки происходит по направлению, параллельному оси переносного вращения;
б)
точка не имеет движения относительно
подвижной системы отсчета или
относительная скорость
точки в данный момент времени равна
нулю (![]() ).
).
12. Сложение вращений твердого тела вокруг параллельных осей.
На
рис. 54 изображено тело, которое совершает
сложное движение – вращение вокруг
оси, которая сама вращается вокруг
другой, неподвижной оси. Естественно,
первое вращение следует назвать
относительным движением тела, второе
– переносным, а соответствующие оси
обозначить
![]() и
и
![]() .
.

Рис.54
Абсолютным
движением будет вращение вокруг точки
пересечения осей О. Угловые скорости
переносного вращения и относительного
вращения изображается векторами
![]() и
и
![]() ,
отложенными из неподвижной точки О,
точки пересечения осей, по соответствующим
осям.
,
отложенными из неподвижной точки О,
точки пересечения осей, по соответствующим
осям.
Найдем
абсолютную скорость какой-нибудь точки
М тела, положение которой определяется
радиусом-вектором
![]() .
.
Как
известно, она складывается из двух
скоростей, относительной и переносной:
![]() .
Где
.
Где
![]() ,
,
![]() .
.
А бсолютная
же скорость, скорость при вращении
вокруг неподвижной точки О, при
сферическом движении, определяется
аналогично
бсолютная
же скорость, скорость при вращении
вокруг неподвижной точки О, при
сферическом движении, определяется
аналогично
![]() ,
где
,
где
![]() - абсолютная угловая скорость,
направленная по мгновенной оси вращения
Р.
- абсолютная угловая скорость,
направленная по мгновенной оси вращения
Р.
По
формуле сложения скоростей получим:
![]() или
или
![]() .
.
Отсюда
![]() ,то
есть мгновенная угловая скорость,
угловая скорость абсолютного движения,
есть векторная сумма угловых скоростей
переносного и относительного движений.
А мгновенная ось вращения P, направленная
по вектору
,
совпадает с диагональю параллелограмма,
построенного на векторах
и
(рис.54).
,то
есть мгновенная угловая скорость,
угловая скорость абсолютного движения,
есть векторная сумма угловых скоростей
переносного и относительного движений.
А мгновенная ось вращения P, направленная
по вектору
,
совпадает с диагональю параллелограмма,
построенного на векторах
и
(рис.54).
Частные случаи:
1. Оси вращения и параллельны, направления вращений одинаковы (рис. 55).

Рис.55
Так
как векторы
и
параллельны и направлены в одну сторону,
то абсолютная угловая скорость по
величине равна сумме их модулей
![]() и вектор ее направлен в туже сторону.
Мгновенная ось вращения Р делит
расстояние между осями на части
обратно пропорциональные
и вектор ее направлен в туже сторону.
Мгновенная ось вращения Р делит
расстояние между осями на части
обратно пропорциональные
![]() и
и
![]() :
:
![]() .
(Аналогично равнодействующей
параллельных сил). В этом частном
случае тело А совершает плоскопараллельное
движение. Мгновенный центр скоростей
.
(Аналогично равнодействующей
параллельных сил). В этом частном
случае тело А совершает плоскопараллельное
движение. Мгновенный центр скоростей
![]() находится на оси Р.
находится на оси Р.
2. Оси вращения параллельны, направления вращений противоположны (рис.56).

Рис.56
В
этом случае
![]() (при
(при
![]() ).
Мгновенная ось вращения и мгновенный
центр скоростей находятся за вектором
большей угловой скорости на расстояниях
таких, что
(опять по аналогии определения
равнодействующей параллельных сил).
).
Мгновенная ось вращения и мгновенный
центр скоростей находятся за вектором
большей угловой скорости на расстояниях
таких, что
(опять по аналогии определения
равнодействующей параллельных сил).
3. Оси вращения параллельны, направления вращений противоположны и угловые скорости равны.
Угловая
скорость абсолютного движения
![]() и, следовательно, тело совершает
поступательное движение. Этот случай
называется парой вращений, по аналогии
с парой сил.
и, следовательно, тело совершает
поступательное движение. Этот случай
называется парой вращений, по аналогии
с парой сил.