

57. Рабочее оборудование одноковшовых экскаваторов.
Экскаватор (от латинского excado – долблю, выдалбливаю) – это самоходная землеройная машина для разработки, перемещения, погрузки и укладки грунта. Его используют при строительстве промышленных и гражданских зданий и сооружений, автомобильных и железных дорог, аэродромов, гидротехнических систем и нефтепроводов, в карьерах при добыче строительных материалов и других полезных ископаемых.
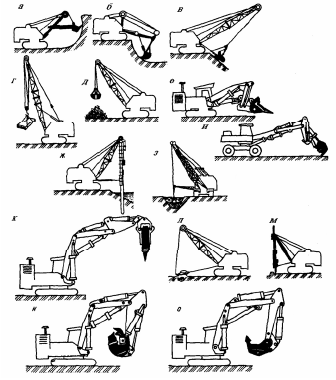
По видам рабочего оборудования (рис. 5.2) – прямая лопата (а); обратная лопата (б); драглайн (в); кран (г); грейфер (д); погрузчик (е); копер (ж); боковой драглайн (з); планировщик (и); гидромолот (к); корчеватель (л); дизель-молот (м); захватно-клещевое оборудование с рыхлителем (н); рыхлитель (о); и др.
60. Определение параметров ковшей прямой и обратной лопаты.
Прямая лопата. Расчет подъемного и напорного механизмов машины сводится к определению усилий и скоростей и мощностей подъема и напора (Pпод, Vпод, Nпод, Pнап, Vнап, Nнап), а также кинематических параметров подъема и напора (диаметра и чисел оборотов барабана, передаточных чисел узлов трансмиссии, кратностей полиспастов и т.п.).
Наибольшее усилие в полиспасте подъема ковша Pпод можно определить исходя из условия равновесия сил для положения копания на уровне оси напорного вала. Рукоять горизонтальна, подъемный канат расположен вертикально, толщина стружки и Рк – наибольшее.
Из уравнения моментов сил относительно точки О (рис. 5.20) найдем подъемное усилие Pпод.
где
 –
касательная составляющая сопротивления
грунта копания, Рн=φ·Pк
– нормальная составляющая сопротивления
грунта копанию; к1
– удельное сопротивление грунта копанию;
qк
– вместимость ковша; кн
– коэффициент
наполнения ковша; Н
– высота копания; кр
– коэффициент разрыхления грунта; φ
– коэффициент пропорциональности,
равный 0,1-0,6; Gр
– вес рукояти; Gк+г
– вес ковша с грунтом.
–
касательная составляющая сопротивления
грунта копания, Рн=φ·Pк
– нормальная составляющая сопротивления
грунта копанию; к1
– удельное сопротивление грунта копанию;
qк
– вместимость ковша; кн
– коэффициент
наполнения ковша; Н
– высота копания; кр
– коэффициент разрыхления грунта; φ
– коэффициент пропорциональности,
равный 0,1-0,6; Gр
– вес рукояти; Gк+г
– вес ковша с грунтом.
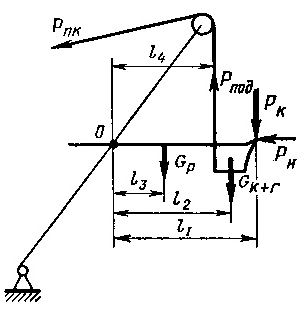
Рис.5.20 Схема для определения усилия подъема ковша прямой лопаты.
Максимальное усилие в полиспасте подъема с учетом динамики при одномоторном приводе по рекомендации Н.Г. Домбровского можно принять равным:
Pпод макс=1,5·Pпод.; (5.20)
Для многомоторного привода:
Pпод макс=1,3· Pпод; (5.21)
Максимальное усилие Рп.к.макс, в канате, наматываемым на барабан подъема будет равно:
Рп.к.макс.=![]() ;
(5.22)
;
(5.22)
где a- кратность полиспаста; ηп- КПД полиспаста.
Скорости подъема ковша Vк в м/с при независимом напоре рекомендуется принимать в зависимости от вместимости ковша qк; при qк=0,25-0,65 м3, V=0,5; при qк=1,0-1,6 м3; при qк=2-3 м3; Vк=0,8; при qк=4 м3 и более; Vк=1,0. При зависимом напоре их требуется увеличивать на 10-15%.
Потребную мощность подъема ковша определяют по формуле:
Nп=
 ; (5.23)
; (5.23)
Активное напорное усилие
Рнап.а
определяют для трех расчетных положений.
Первое из них (рис. 5.21) соответствует
началу копания, когда рукоять вертикальна,
угол наклона стрелы к горизонту α
равен 600,
сила Pпод
равна расчетному
значению, ковш пустой: отношение
![]() =0,5.
=0,5.
Второе расчетное положение
соответствует концу копания; при этом
рукоять расположена на уровне напорного
вала, ковш наполнен грунтом,
![]() =0,2.
Третье расчетное положение соответствует
выдвижению рукояти на полный вылет с
подъемом ковша в крайнее верхнее
положение,
=0,2.
Третье расчетное положение соответствует
выдвижению рукояти на полный вылет с
подъемом ковша в крайнее верхнее
положение,
![]() =0,
т.е. реакция грунта отсутствует.
=0,
т.е. реакция грунта отсутствует.
Активное напорное усилие можно найти аналитическим путем или графически – построением многоугольника сил, действующих на ковш с рукоятью. На рис. 5.21 приведен графический способ определения напорного усилия для указанных положений. В первых двух случаях напорное усилие должно преодолевать нормальную составляющую сопротивления грунта копанию Рн и горизонтальную составляющую подъемного усилия. В третьем положении напорное усилие удерживает рукоять с ковшом, наполненным грунтом. На графиках определены напорное усилие Рнап.а, нормальная реакция в седловом подшипнике Nс и результирующая этих сил Rс.
Для расчета зависимого и независимого напорных механизмов подставляют наибольшее значение Рнап.а, полученное в двух указанных положениях. По значению Рнап.а, полученному для третьего положения, рассчитывают тормоза и независимую часть комбинированного напорного механизма. Скорость напора Vн выбирают исходя из условия, чтобы рукоять полностью выдвигалась за время копания:
![]() ;
(5.24)
;
(5.24)
где lх.р – наибольший ход рукояти; tк – время копания.
Усилие для обеспечения обратного хода рукояти (ее возврата) проверяют только для первого положения. Это усилие должно быть достаточным для втягивания рукояти.
![]() ;
(5.25)
;
(5.25)
Обратная лопата. Расчет основных механизмов обратной лопаты сводится к определению тягового усилия Ртяг и усилия в полиспасте подъема рабочего оборудования Рпод (рис. 5.22).
Толщину стружки принимают такой же как и при оборудовании прямой лопаты. Расчетное тяговое усилие Ртяг определяют для положения в конце копания, когда на ковш действует максимальное сопротивление грунта копанию, из уравнения моментов сил относительно шарнира – крепления рукояти к стреле (точка А).
![]() ;
(5.26)
;
(5.26)
Мощность привода тягового механизма можно определить по формуле:
 ;
(5.27)
;
(5.27)
где Vтяг –скорость движения тягового полиспаста; ηтяг- КПД тягового механизма.
Усилие в полиспасте подъема рабочего оборудования определяют при том же расчетном положении из уравнения моментов ил, действующих на рабочее оборудование, относительно пяти стрелы (точка Б).
Pпод=![]() ; (5.28)
; (5.28)
Мощность, расходуемую на подъем лопаты, можно определить из выражения:
Nпод= ;
(5.29)
;
(5.29)
где Vпод – скорость движения полиспаста подъема стрелы; ηпод – КПД механизма подъема.
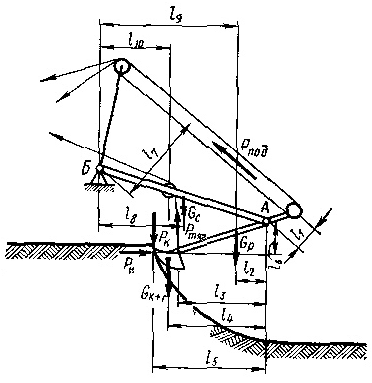
Рис. 5.22 Схема для определения тягового и подъемного усилий обратной лопаты.