

19 Гидротрансформаторы, их характеристики.
Гидравлические трансмиссии. К гидравлическим трансмиссиям относят гидродинамические и гидрообъемные передачи.
Гидродинамические трансмиссии выполняют с гидромуфтами или гидротрансформаторами. Их особенность в отсутствии жесткой связи между ведущей и ведомой частями. Мощность предается за счет кинетической энергии рабочей жидкости, воздействующей на лопасти рабочих колес.
Гидромуфта состоит только из двух колес (рис. 3.3 а): ведущего (насосного) 3 и ведомого (турбинного) 2. Первое соединяют с двигателем, второе – с ведомым элементом 1 трансмиссии. Оба колеса образуют замкнутое кольцевое пространство – рабочую полость, которую заполняют жидкостью. Лопатками насосного колеса, приводимого во вращение двигателем, жидкость отбрасывается к периферии рабочей полости и попадая на лопатки турбинного колеса, приводит его во вращение. Затем жидкость снова поступает к насосному колесу.
Гидромуфта не предназначена для преобразования величины и направления крутящего момента. Она может служить лишь надежной защитой механических трансмиссий и силовых установок МЗР от перегрузок.
Р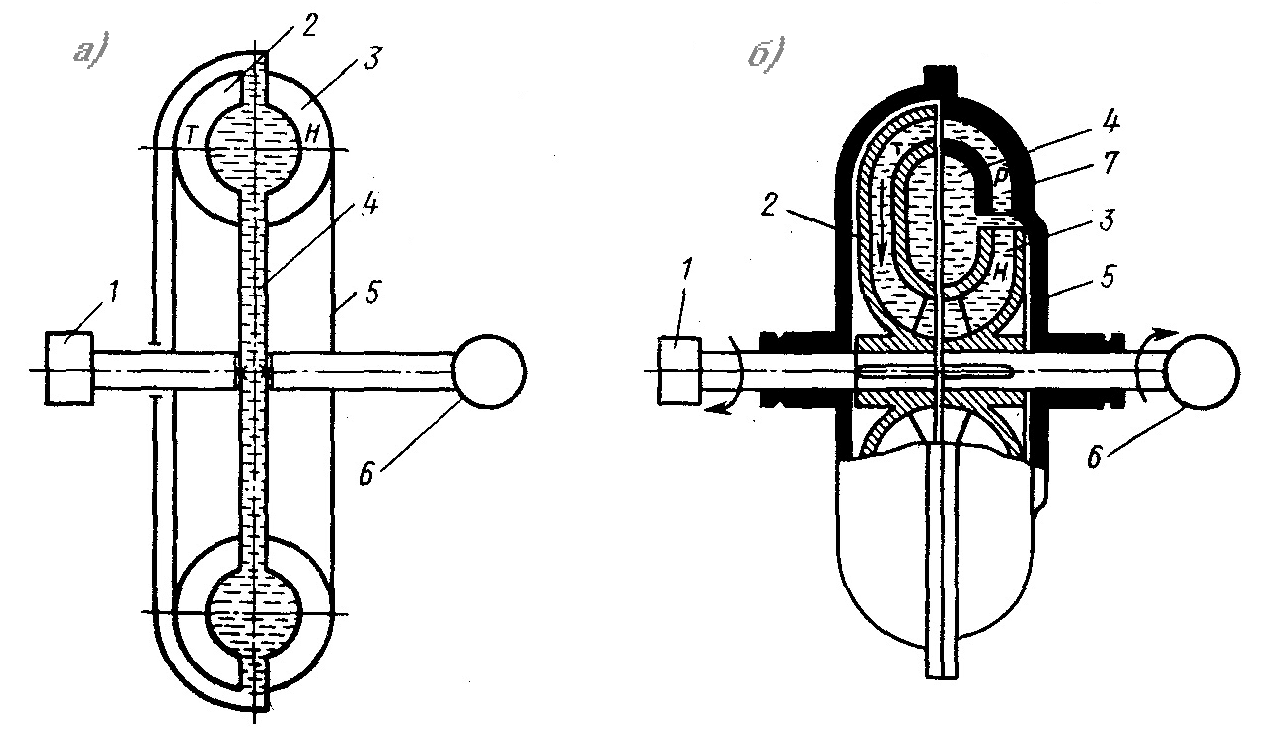 ис.
3.3 Принципиальные схемы гидродинамических
трансмиссий: а – гидромуфты; б
– гидротрансформатора.
ис.
3.3 Принципиальные схемы гидродинамических
трансмиссий: а – гидромуфты; б
– гидротрансформатора.
Гидротрансформатор (рис. 3.3 б) состоит из 3-х рабочих элементов: насосного колеса 3, закрепленного на ведущем валу, турбинного колеса 2, жестко посаженного на ведомый вал и неподвижного направляющего аппарата (реактора) 7. Межлопаточные каналы этих рабочих элементов заполняют, как и в гидромуфте, циркуляционной жидкостью. Благодаря наличию направляющего аппарата при изменении внешней нагрузки в гидротрансформаторе преобразуется не только скорость вращения, но и крутящий момент. Коэффициент трансформации может меняться в пределах от 2 до 6.
Гидротрансформаторы в трансмиссиях МЗР могут выполнять роль бесступенчатых редукторов, плавно и автоматически изменяющих величины крутящих моментов. Гидротрансформатор надежно предохраняет двигатель от перегрузок. Однако из-за сравнительно низкого КПД гидротрансформатора возникает необходимость увеличивать мощность силовой установки на 10-15%, что снижает экономичность машины. Гидродинамические трансмиссии широко применяют на экскаваторах, самоходных скреперах, колесных бульдозерах и погрузчиках.
20. Способы массового разрушения грунтов.
Гидромеханический способ разработки грунтов отличается высокой эффективностью и производительностью, особенно при массовых объемах земляных работ. Однако для его реализации требуется большое количество воды, в связи с чем он применим для разработки грунтов вблизи водоемов, с береговых урезов и со дна водоемов. Кроме того, способ гидромеханизации применим не для всех грунтов. Плохо поддаются такой разработке грунты, содержащие большое количество камней, а также плотные глинистые.
21. Рабочие органы землеройных машин и их взаимодействие c грунтом.
Конструкция рабочего органа машины для земляных работ определяется в первую очередь его технологическими функциями, которыми могут быть отделение от массива кусков или слоя (стружки) грунта, захват грунта, отделившегося от массива, его накопление, удержание при переносе, укладка или погрузка, планировка, перемещение по поверхности, уплотнение, продавливание и т. п.
Рабочие органы машин для земляных работ различают по виду режущей кромки. Режущая кромка (рис. 2.1) может иметь вид прямого клина 1, косого клина 2, диска 3, совка 4 или периметра 5. Кроме этого, режущие кромки могут иметь зубья для разработки прочных грунтов.
По способу перемещения грунта рабочие органы делятся на три группы: отвального типа, ковшового и скребкового. Рабочие органы отвального типа, как правило, имеют режущую кромку в виде прямого или косого клина, сочетающегося с отвальной поверхностью криволинейного очертания (рабочие органы бульдозеров 6, автогрейдеров 7, грейдер - элеваторов 8 и др.).
У рабочих органов ковшового типа имеются режущие кромки, оснащенные зубьями или без них (прямая, обратная лопата 12, драглайн 13, грейфер 14, многоковшовые экскаваторы 15, 16, 17, скрепер 9). Траектории движения ковшей во время заполнения могут быть прямолинейными, как у драглайна 13 и цепного органа 15, или криволинейными, как у одноковшовых экскаваторов 12 или роторных 16, 17. Бесковшовые рабочие органы срезают грунт, не перемещая его, а для транспортирования его служат специальные средства, как например, лопатки скребкового цепного рабочего органа 18 или выбросные лопатки ротационного рабочего органа 19.
По способу действия рабочие органы различают как пассивные так и активные. К первым (поз. 6-11 на рис. 2.1) относят такие, которые при работе не перемещаются по отношению к машине, рабочие же усилия возникают от энергии, подводимой к движителю машины. Рабочие органы активного действия (поз. 12-19 на рис. 2.1) при работе перемещаются по отношению к машине и приводятся в движение двигателем машины непосредственно, минуя движитель.
Применяются и рабочие органы комбинированного действия (поз. 20-22 на рис. 2.1), которые для выполнения рабочего процесса кроме энергии, сообщаемой движителем, реализуют одновременно энергию, получаемую непосредственно от первичного двигателя (плужно-роторный рабочий орган 20, рыхлитель с вибровозбудителем 21, корчеватель активного действия 22).