

3.8 Круговая интерполяция g2/g3, cip
Программирование
G2/G3 X... Y... Z... I... J... K...
G2/G3 AP=... RP=...
G2/G3 X... Y... Z... CR...
G2/G3 AR=... I... J... K...
G2/G3 AR=... X... Y... Z...
CIP X... Y... Z... I1=... J1=... K1=...
Объяснение команд и параметров
G2 Перемещение по круговой траектории по часовой стрелке
G3 Перемещение по круговой траектории против часовой стрелки
CIP Круговая интерполяция через промежуточную точку
X Y Z Конечная точка в Декартовой системе координат
I J K Центр круга в Декартовой системе координат (в X, Y, Z направлении)
AP= Конечная точка в полярных координатах, в данном случае полярный угол
RP= Конечная точка в полярных координатах, в данном случае полярный радиус (соответствует радиусу круга)
CR= Радиус круга
AR= Угол дуги
I1= J1= K1 Промежуточные точки в Декартовой системе координат (в X, Y, Z направлении)
Функция
Круговая интерполяция способствует обработке всех кругов или дуг.
Последовательность
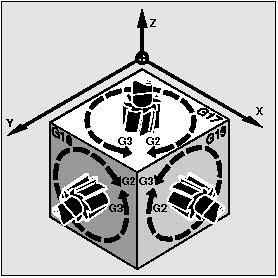
Определение рабочей плоскости
Управлению нужны параметры (G17-G19) для расчета направления вращения круга - G2 по часовой или против часовой стрелки.
Обычно рекомендуется определять рабочую плоскость.
Исключение:
Вы можете также обрабатывать внешнюю плоскость круга (не с углом дуги и параметрами спирали). В этом случае адреса оси, которые Вы определяете как конечную точку, определяют плоскость круга.
Дополнительные замечания
G2/G3 - модальны
FGROUP может использоваться для определения, какие оси должны перемещаться с запрограммированной подачей.
Управление обеспечивает диапазон различных способов программирования круговых перемещений, позволяющих запрограммировать почти любой тип размера чертежа.
Круговые перемещения описываются:
-
конечной точкой в декартовых координатах X, Y, Z и
-
центральной точкой на адресах I,J,K.
Идентификаторы имеют следующее значение:
I: координата центральной точки в
направлении Х
J: координата центральной точки в
направлении Y
K: координата центральной точки в
направлении Z
Е
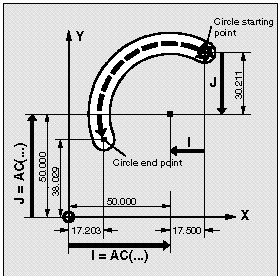
Circle
starting point - исходная точка круга
Circle
end point - конечная точка круга
точкой, а не конечной, результатом будет
полный круг.
Ввод в абсолютные или инкрементные размеры G90/G91 по умолчанию абсолютных
или инкрементных размеров действуют только для конечной точки круга. Координаты
центральной точки I, J, K обычно вводятся в инкрементных размерах в соотношении с
исходной точкой круга.
Вы программируете абсолютную центральную точку немодальную в соотношении с нулем детали с: I=AC(...), J=AC(...), K=AC(...).
Пример инкрементных размеров:
N10 G0 X67.5 Y80.211
N20 G3 X17.203 Y38.029 I–17.5 J–30.211 F500
Пример абсолютных размеров:
N10 G0 X67.5 Y80.211
N20 G3 X17.203 Y38.029 I=AC(50) J=AC(50)
Параметр интерполяции I, J, K со значением 0 может быть пропущен, следующий соответствующий параметр должен всегда быть определен.

Круговое перемещение описывается при помощи:
-
радиуса круга CR= и
-
конечной точкой в Декартовых координатах X, Y, Z.
Кроме того радиус круга Вы можете также определить начальным знаком
+/-, чтобы указать, больше ли или меньше угол пересечения 180 . Положительный начальный знак опускается.
Значениями являются следующие:
CR=+...: угол < 180
CR=-...: угол > 180 .
Пример:
N10 G0 X67.5 Y80.211
N20 G3 X17.203 Y38.029 CR=34.913 F500
Вам не нужно определять центр данным процессом.
Полные круги (пересечение на 360 ) не могут
программироваться с CR=, но должны программироваться
при помощи конечной точки круга и параметрами интерполяции.
 Программирование
круга с углом дуги и центром или конечной
точкой
Программирование
круга с углом дуги и центром или конечной
точкой
Круговые перемещения описываются при помощи:
-
угла дуги R= и
-
конечной точкой в Декартовых координатах X, Y, Z или
-
центром у адресов I, J, K
Значениями являются следующие:
AR=: угол дуги, диапазон значений 0-360 .
Смотрите предыдущие страницы для значений I, J, K.
Полные круги (пересечение на 360 ) не могут
программироваться с CR=, но должны
программироваться при помощи конечной точки
к
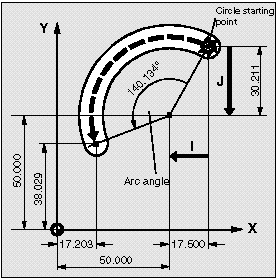
Circle
starting point - исходная точка круга
Arc
angle - угол дуги
Пример:
N10 G0 X67.5 Y80.211
N20 G3 X17.203 Y38.029 AR=140.134 F500
или
N20 G3 I-17.5 J-30.211 AR=140.134 F500
Круговые перемещения описываются при помощи:
-
полярного угла AP=
-
и полярного радиуса RP=
Применяются следующие правила:
Полюс лежит в центре.
Полярный радиус соответствует радиуса круга.
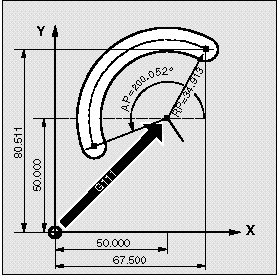
Пример:
N10 G0 X67.5 Y80.211
N20 G111 X50 Y50
N30 G3 RP=34.913 AP=200.052 F500
 Пример
программирования
Пример
программирования
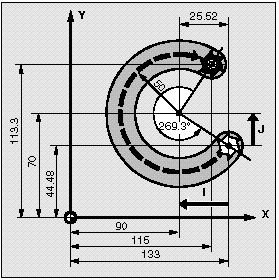
На следующих строчках программы Вы найдете пример ввода для всех способов программирования круга. Необходимые размеры показаны на представленном производственном чертеже.
N10 G0 X133 Y44.48 S800 M3 Подвод начальной точки
N2- G17 G1 2-5 F100 Подача инструмента на врезание
N30 G2 X115 Y113.3 I-43 J25.52 Конечная точка круга, центр в инкрементных размерах
или
N30 G2 X115 Y113.3 I=AC(90) J=AC(70) Конечная точка круга, центр в абсолютных размерах
или
N30 G2 X115 Y113.3 CR=50 Центр круга, радиус круга
или
N30 G2 AR=269.31 I-43 J25.52 Угол дуги, центр в инкрементных размерах
или
N30 G2 AR=269.31 X115 Y113.3 Угол дуги, конечная точка круга