

2.4 Построение амплитудно-фазовой характеристики разомкнутой системы определение запасов устойчивости по модулю и по фазе
Передаточная функция разомкнутой системы
Для построения АФХ разомкнутой системы найдём вещественную и мнимую части:
Построим АФХ разомкнутой системы при τ =1:
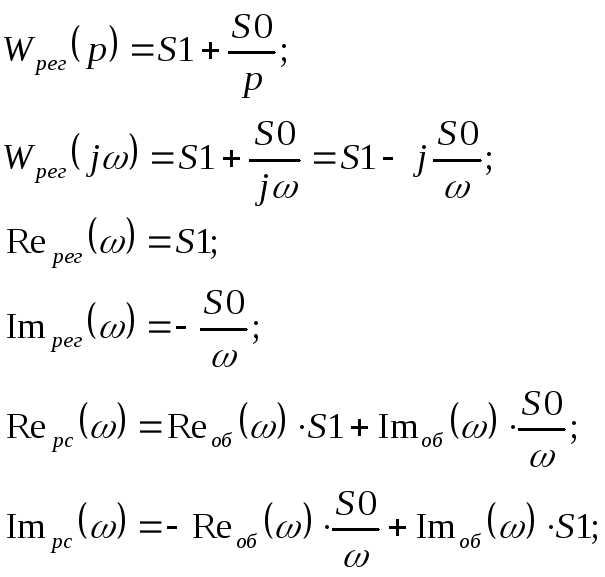
По выведенным амплитудно-частотной и фазо-частотной характеристикам и найденным настройкам регулятора S0 и S1 получим:


Где:
![]() ,
,![]()
Данные построения АФХ разомкнутой системы представлены в таблице 2.4.
Таблица 2.4.
|
Re |
-111.43 |
-5.748 |
-4.369 |
-3.519 |
-2.546 |
-2.241 |
|
-0.977 |
|
|
Im |
-22.82 |
-4.236 |
-3.414 |
-2.815 |
-1.997 |
-1.705 |
|
-0.414 |
|
|
ω |
0.01 |
0.05 |
0.06 |
0.07 |
0.09 |
0.1 |
|
0.2 |
|
По приведённым данным строим АФХ разомкнутой системы (рис. 21).
М f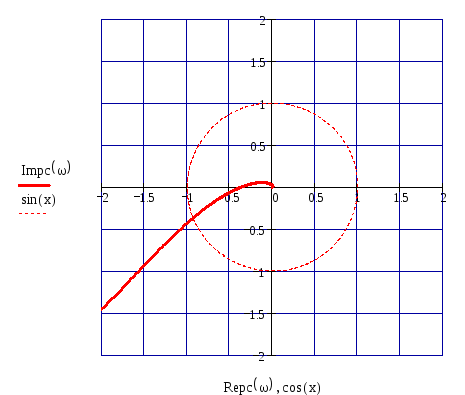



Рисунок 21 – АФХ разомкнутой системы при τ =1
Запас устойчивости по модулю М определяется как расстояние от годографа амплитудно-фазовой характеристики при Im(Wрс(j))=0 до точки с координатами (-1;j0).
М = |-1 - (-0.4)| = 0.6
Запас устойчивости по фазе определяется как угол между отрицательным направлением оси Re и вектором Wрс(j) единичной длины:
f = 21.1’
3.1 Построение переходных процессов при τ = 1
3.1 Построение переходного процесса в замкнутой системе по каналу управления.
Общая формула передаточной функции замкнутой системы:
![]() ;
;
где
![]() ;
;

Где S0 = 0.011 S1= 0.295 (при τ = 1).
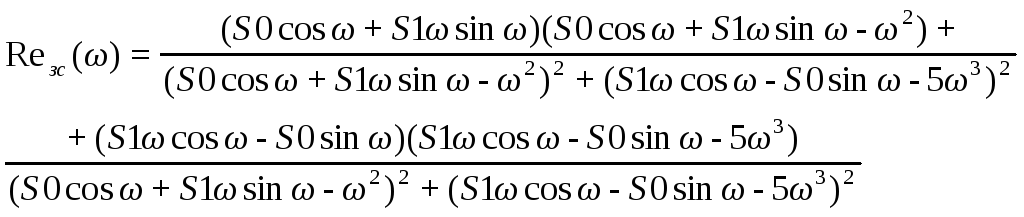
Определяем
аналитическое выражение для расчета
вещественной частотной характеристики
замкнутой системы
![]() :
:
В передаточной функции замкнутой системы заменим р на j
 Где
Где
![]()

Подставляя исходные данные получим:
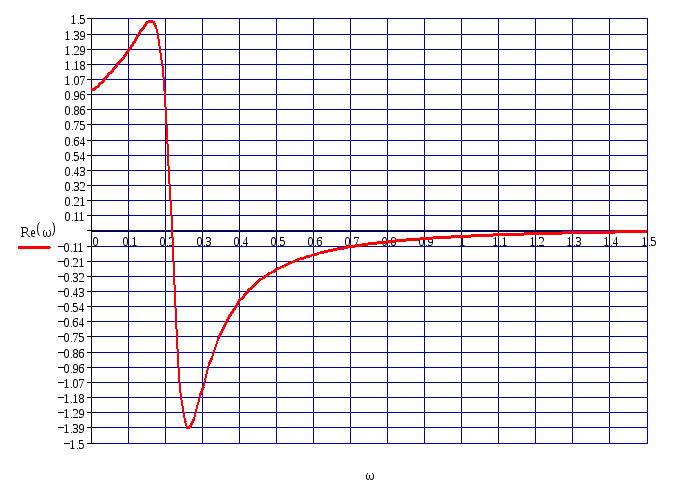
Подставляя в формулу для ВЧХ по каналу управления оптимальные настройки регулятора S0 = 0.011, S1= 0.295 строим график ВЧХ при наличии запаздывания в канале управления при τ =1.
Для построения переходного процесса воспользуемся методом, который основан на использовании вещественной частотной характеристики замкнутой системы – метод трапеций.
Представим ВЧХ замкнутой системы в виде непрерывной ломаной линии.
Действуя по алгоритму данного метода, заменяем ломаную линию комбинацией трапеций. Вещественная частотная характеристика системы определяется как сумма ординат всех трапеций:
![]() ,
где
,
где
ri – высота i- номер трапеции.
Переходный процесс в системе находится как сумма переходных процессов для каждой из трапеций:
![]() где
где
 ;
;
На рис. 22 изображены графики ВЧХ замкнутой системы по каналу управления и график на котором кривая линия ВЧХ заменена совокупностью четырёх трапеций.
Данные для построения ВЧХ замкнутой системы по каналу управления представлены в таблице 3.1
Таблица 3.1.
|
|
1 |
1.286 |
0.691 |
-1.104 |
-0.488 |
-0.265 |
|
-0.167 |
|
|
ω |
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
|
0.6 |
|
|
|
-0.11 |
-0.075 |
-0.052 |
-0.037 |
-0.025 |
-0.018 |
|
-0.01 |
|
|
ω |
0.7 |
0.8 |
0.9 |
1.0 |
1.1 |
1.2 |
|
1.3 |
|





![]()
![]()
![]()

Для
каждой трапеции найдем высоту
![]() ,
частоту
,
частоту![]() и частоту среза
и частоту среза![]() .
.
|
№ трапеции |
|
|
|
|
1 |
-0.5 |
0 |
0.185 |
|
2 |
2.9 |
0.185 |
0.26 |
|
3 |
-0.3 |
0.4 |
0.85 |
|
4 |
-1.1 |
0.26 |
0.4 |
Подставляя параметры для каждой трапеции в формулу для hi(t) находим переходный процесс для i -ой трапеции:
а) Переходный процесс для первой трапеции представлен на рис. 23.
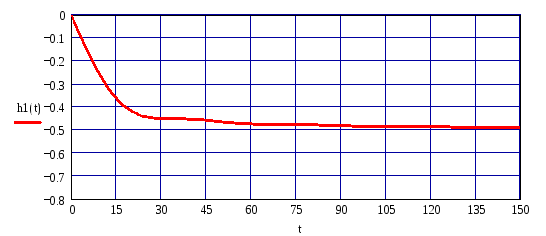
Рисунок 23 – Переходный процесс для первой трапеции
![]()
б) Переходный процесс для второй трапеции (рис. 24)
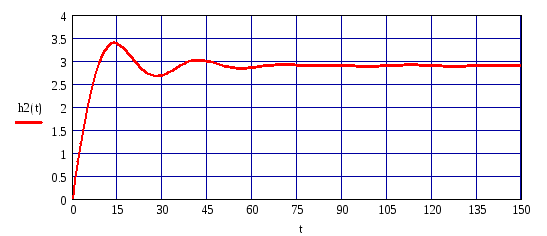
Рисунок 24 – Переходный процесс для второй трапеции
![]()
в) Переходный процесс для третьей трапеции (рис. 25)
![]()
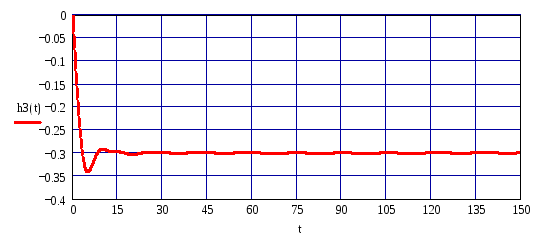
Рисунок 25 – Переходный процесс для третьей трапеции
г) Переходный процесс для четвёртой трапеции (рис. 26)
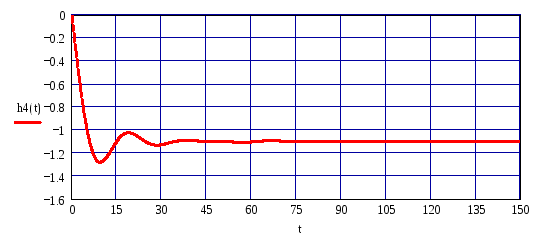
Рисунок 26 – Переходный процесс для четвёртой трапеции
![]()
д) Построение переходного процесса в системе определяется по формуле:
![]()
Данные для построения переходных процессов по всем четырём трапециям приведены в таблице 3.2.
Таблица 3.2
|
Значение параметров для трапеций | |||||||||||
|
Трапеция 1 | |||||||||||
|
t |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
|
h1 |
0 |
-0.36 |
-0.45 |
-0.46 |
-0.47 |
-0.47 |
-0.47 |
-0.47 |
-0.49 |
-0.49 |
-0.49 |
|
Трапеция 2 | |||||||||||
|
t |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
|
h2 |
0 |
3.38 |
2.69 |
2.99 |
2.85 |
2.91 |
2.89 |
2.90 |
2.90 |
2.91 |
2.90 |
|
Трапеция 3 | |||||||||||
|
t |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
|
h3 |
0 |
-0.297 |
-0.299 |
-0.297 |
0.299 |
0.30 |
0.299 |
0.30 |
0.299 |
0.30 |
0.299 |
|
Трапеция 4 | |||||||||||
|
t |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
|
h4 |
0 |
-1.10 |
-1.12 |
-1.09 |
-1.105 |
-1.104 |
-1.099 |
-1.101 |
-1.102 |
-1.091 |
-1.105 |
Суммарный переходный процесс изображён на рис. 27.
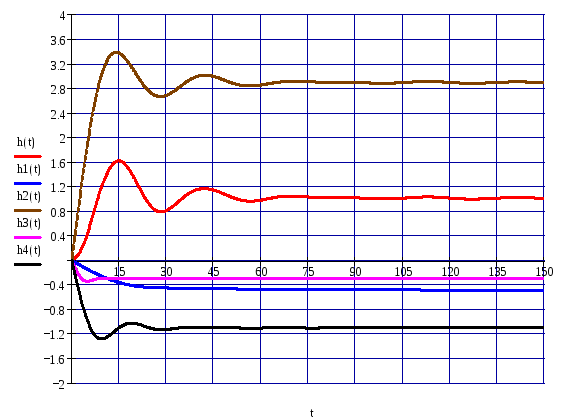
Рисунок 27 – Суммарный переходный процесс по каналу управления