

Астраханский Государственный Технический Университет
Кафедра «Автоматизация технологических процессов»
Дисциплина «Теория автоматического управления»
Специальность «Автоматизация технологических процессов и производств»
Курс 4 Группа ИА-41 Семестр 7
ЗАДАНИЕ
на курсовой проект (работу) студента
Морозова Алексея Сергеевича
-
Тема проекта (работы): расчет одноконтурной автоматической системы регулирования.
-
Срок сдачи студентом законченного проекта:
-
Исходные данные к проекту: дифференциальное уравнение объекта регулирования по каналу регулирующего воздействия.
-
Содержание расчетно-пояснительной записки (перечень подлежащих разработке вопросов): 1. Запись передаточной функции объекта управления; 2. Построение переходной кривой; 3. Получение аппроксимирующих передаточных функций для объекта управления; 4. Расчет и построение частотных характеристик объекта управления; 5. Расчет оптимальных настроек регулятора методом расширенных частотных характеристик; 6. Расчет и построение АФХ замкнутой системы; 7. Построение переходного процесса по возмущению в системе регулирования приближенными методами; 8. Оценка качества переходного процесса по возмущению.
-
Перечень графического материала: частотные характеристики объекта управления; переходные процессы по каналам управления и возмущения; схема моделирования; кривая настроек регулятора; КЧХ замкнутой системы регулирования.
-
Дата выдачи задания:
Студент
Руководитель доц., к.т.н. Кантемиров В.И.
Объект регулирования – котельный
агрегат. Регулируемая величина –
паропроизводительность котлоагрегата
![]() ,
номинальная производительность 150
,
номинальная производительность 150![]() .
Измерение паропроизводительности
осуществляется сильфонным дифманометром
с передаточной функцией:
.
Измерение паропроизводительности
осуществляется сильфонным дифманометром
с передаточной функцией:
![]() .
.
Содержание.
-
Запись передаточной функции объекта регулирования (ОР). Преобразование последовательного соединения ОР и чувствительного элемента…………………………2
-
Решение дифференциального уравнения объекта управление (ОУ) при заданном входном воздействии. Построение переходной кривой. Определение динамических параметров ОУ………………………………………………………………………………..3
-
Получение аппроксимирующих передаточных функций для ОУ………………………...7
-
Методом Симою ……………………………………………………………………..7
-
В виде апериодического звена 2ого порядка с запаздыванием……………..……11
-
С использованием диаграммы Ольденбурга-Сарториуса………………………...14
Построение расчетных и смоделированных переходных процессов для полученных аппроксимирующих передаточных функций……………………………………………...15
Расчет и построение частотных характеристик ОУ……………………………………….20
Расчет оптимальных настроек ПИД-регулятора методом расширенных частотных характеристик……………………………………………………………………………......25
Получение передаточной функции замкнутой системы по возмущению. Расчет и построение АФХ замкнутой системы по возмущению………………………………......29
Построение переходного процесса в системе регулирования при единичном возмущающем воздействии………………………………………………………………...32
-
Методом Акульшина………………………………………………………………..32
-
С использованием ВЧХ замкнутой системы……………………………….……...36
Оценка качества переходного процесса по возмущению………………………………...38
Вывод………………………………………………………………………………………...39
Входное воздействие – изменение подачи
топлива
![]() ,
измеренное в процентах хода регулирующего
органа.
,
измеренное в процентах хода регулирующего
органа.
Дифференциальное уравнение объекта
управления (по каналу регулирующего
воздействия) имеет вид:
![]() .
.
-
Составить структурную схему данного объекта регулирования, представив его соединением типовых элементарных динамических звеньев.
-
Найдем передаточную функцию объекта регулирования:
Применяя прямое преобразование Лапласа к дифференциальному уравнению объекта регулирования получим:
|
Оригинал |
Изображение |
|
А(t), где А=const |
|
|
x(t) |
X(p) |
|
|
|
|
|
|
![]()
Из определения передаточной функции получим:
![]()

-
Соединить объект регулирования с чувствительным элементом. Записать передаточную функцию и дифференциальное уравнение полученного соединения. Составить структурную схему полученного соединения. Данное соединение в последствии считать объектом регулирования по отношению к регулятору.
-
Найдем передаточную функцию соединения (последовательное соединение ЧЭ и объекта регулирования):
![]()

-
Найдем дифференциальное уравнение соединения, применив обратное преобразование Лапласа:
![]()
![]()
-
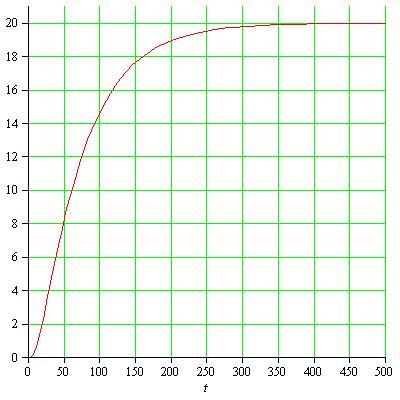
Решим дифференциальное уравнение объекта при
 и построить расчетную кривую разгона:
и построить расчетную кривую разгона:
ыражение для расчетной кривой разгона
можно получить с помощью обратного
преобразования Лапласа:
![]() ,
где
,
где
![]() заданное
входное воздействие.
заданное
входное воздействие.
Обратное преобразование Лапласа найдем в пакете Maple 11:
-
with(inttrans) – объявляем об использовании обратного преобразования Лапласа.
-
invlaplace(
 )
→
)
→
→ применяем обратное преобразование
Лапласа и выводим результат.
применяем обратное преобразование
Лапласа и выводим результат.
-
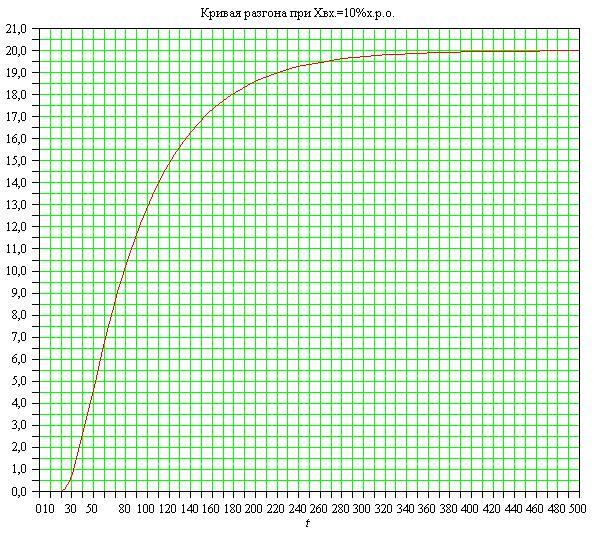
plot(y(t),t=0..500) – строим график расчетной кривой разгона для интервала времени [0;500].
Таблица значений кривой разгона при
![]()
|
|
|
|
|
|
|
0 |
0 |
19,4 |
250 |
|
|
0,0015 |
10,8 |
19,5 |
261 |
|
|
0,0015 |
15,6 |
19,6 |
270 |
|
|
0,017 |
20,3 |
19,65 |
281 |
|
|
0,047 |
21,7 |
19,7 |
291 |
|
|
0,11 |
23 |
19,75 |
302 |
|
|
0,19 |
24,3 |
19,8 |
312 |
|
|
0,3 |
25,6 |
19,85 |
323 |
|
|
0,59 |
27,8 |
19,87 |
333 |
|
|
0,96 |
31 |
19,9 |
344 |
|
|
1,88 |
36,4 |
19,95 |
354 |
|
|
2,95 |
41,7 |
19,96 |
365 |
|
|
4,07 |
47,1 |
19,97 |
375 |
|
|
5,19 |
52,4 |
19,98 |
385 |
|
|
6,21 |
57,4 |
20 |
398 |
|
|
7,19 |
62,4 |
20 |
406 |
|
|
8,15 |
67,4 |
20 |
417 |
|
|
9,05 |
72,6 |
20 |
427 |
|
|
10,7 |
83,2 |
20 |
438 |
|
|
12,2 |
93,7 |
20 |
447 |
|
|
13,4 |
105 |
20 |
458 |
|
|
14,4 |
114 |
20 |
468 |
|
|
15,3 |
125 |
20 |
479 |
|
|
16 |
136 |
20 |
489 |
|
|
16,7 |
146 |
20 |
500 |
|
|
17,1 |
156 |
|
||
|
17,6 |
167 |
|
||
|
18 |
177 |
|
||
|
18,3 |
188 |
|
||
|
18,5 |
197 |
|
||
|
18,8 |
208 |
|
||
|
19 |
219 |
|
||
|
19,1 |
229 |
|
||
|
19,3 |
239 |
|
||
-
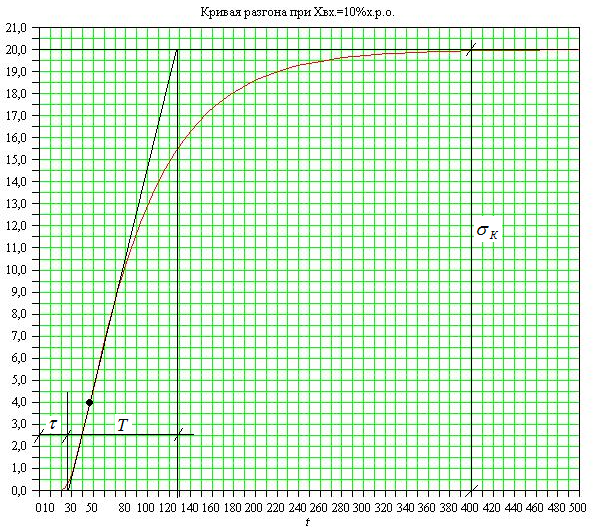
По полученной расчетной кривой разгона найдем динамические параметры объекта
![]() :
:
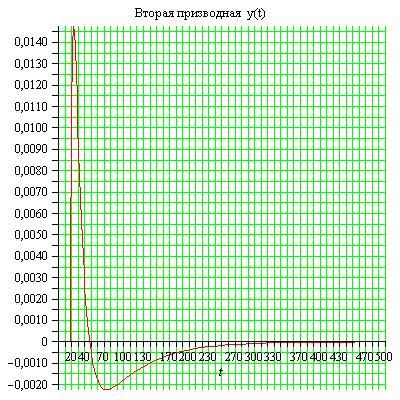
Чтобы найти точку перегиба определим её абсциссу. Абсцисса точки перегиба является абсциссой точки экстремума графика первой производной от гривой разгона:
-
Найдем производную от кривой разгона в пакете Maple 11:
 diff(y(t),t)
- дифференцируем по
переменной t
функцию y(t).
diff(y(t),t)
- дифференцируем по
переменной t
функцию y(t).
 plot(y'(t),t=0..500)-
строим график y'(t)
на интервале [0;500].
plot(y'(t),t=0..500)-
строим график y'(t)
на интервале [0;500].
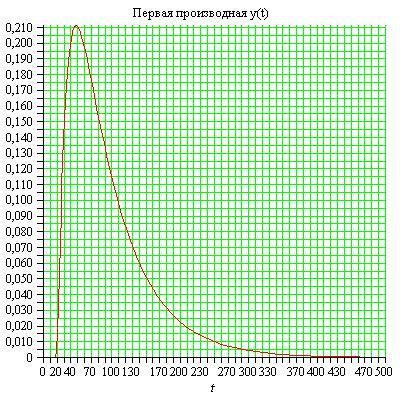
Из графика определяем абсциссу точки перегиба t ≈47,1(c).
![]() входное
воздействие;
входное
воздействие;
![]() установившееся
значение переходного процесса;
установившееся
значение переходного процесса;
![]() запаздывание;
запаздывание;
![]() постоянная
времени.
постоянная
времени.
![]() степень
самовыравнивания;
степень
самовыравнивания;
![]() скорость
разгона;
скорость
разгона;
![]() коэффициент
усиления.
коэффициент
усиления.
-
Получим передаточную функцию объекта аппроксимацией его кривой разгона с помощью метода Симою:
-
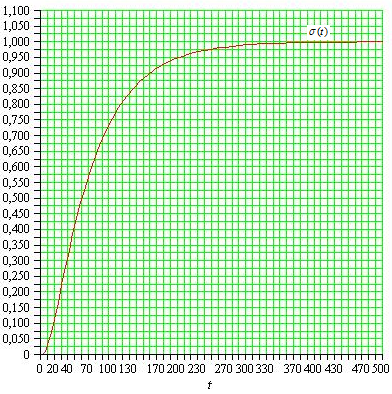
Из полученной расчетной кривой разгона уберем участок запаздывания:
-
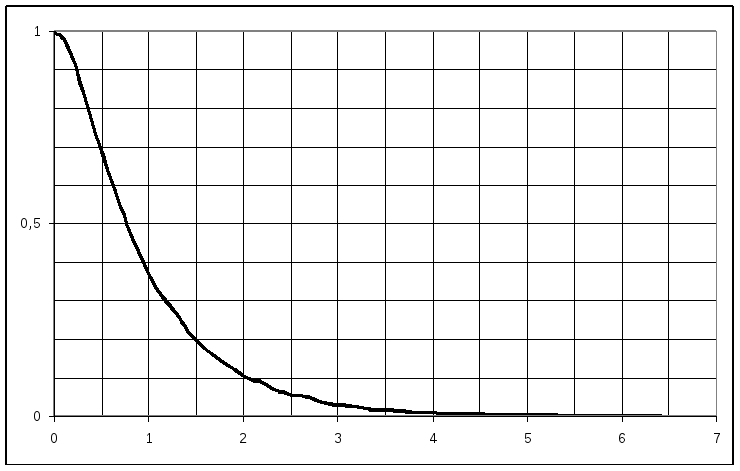
Построим кривую разгона в безразмерном виде
 :
:
-
Искомая передаточная функция можно записать в виде:
 ,
где
,
где
 пе-редаточная
функция найденная с помощью метода
Симою (т.к.
пе-редаточная
функция найденная с помощью метода
Симою (т.к.
 ,
то по рекомендациям передаточная
ф-ция имеет данный вид). Где
,
то по рекомендациям передаточная
ф-ция имеет данный вид). Где

-
Заполним следующую таблицу:

|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
0 |
250 |
0,9765 |
0,0235 |
3,2069 |
|
|
10 |
0,029 |
0,971 |
0,1283 |
260 |
0,98 |
0,02 |
3,3351 |
|
|
20 |
0,11 |
0,89 |
0,2565 |
270 |
0,983 |
0,017 |
3,4634 |
|
|
30 |
0,21 |
0,79 |
0,3848 |
280 |
0,985 |
0,015 |
3,5917 |
|
|
40 |
0,32 |
0,68 |
0,5131 |
290 |
0,9875 |
0,0125 |
3,7199 |
|
|
50 |
0,41 |
0,59 |
0,6414 |
300 |
0,99 |
0,01 |
3,8482 |
|
|
60 |
0,5 |
0,5 |
0,7696 |
310 |
0,9915 |
0,0085 |
3,9765 |
|
|
70 |
0,57 |
0,43 |
0,8979 |
320 |
0,9925 |
0,0075 |
4,1048 |
|
|
80 |
0,64 |
0,36 |
1,0262 |
330 |
0,9935 |
0,0065 |
4,233 |
|
|
90 |
0,69 |
0,31 |
1,1545 |
340 |
0,995 |
0,005 |
4,3613 |
|
|
100 |
0,73 |
0,27 |
1,2827 |
350 |
0,9953 |
0,0047 |
4,4896 |
|
|
110 |
0,78 |
0,22 |
1,411 |
360 |
0,9958 |
0,0042 |
4,6179 |
|
|
120 |
0,81 |
0,19 |
1,5393 |
370 |
0,9965 |
0,0035 |
4,7461 |
|
|
130 |
0,84 |
0,16 |
1,6676 |
380 |
0,9975 |
0,0025 |
4,8744 |
|
|
140 |
0,86 |
0,14 |
1,7958 |
390 |
0,9976 |
0,0024 |
5,0027 |
|
|
150 |
0,88 |
0,12 |
1,9241 |
400 |
0,9977 |
0,0023 |
5,131 |
|
|
160 |
0,9 |
0,1 |
2,0524 |
410 |
0,998 |
0,002 |
5,2592 |
|
|
170 |
0,91 |
0,09 |
2,1807 |
420 |
0,9985 |
0,0015 |
5,3875 |
|
|
180 |
0,93 |
0,07 |
2,3089 |
430 |
0,9986 |
0,0014 |
5,5158 |
|
|
190 |
0,938 |
0,062 |
2,4372 |
440 |
0,9987 |
0,0013 |
5,6441 |
|
|
200 |
0,9475 |
0,0525 |
2,5655 |
450 |
0,9995 |
0,0005 |
5,7723 |
|
|
210 |
0,955 |
0,05 |
2,6938 |
460 |
0,9996 |
0,0004 |
5,9006 |
|
|
220 |
0,9625 |
0,0375 |
2,822 |
470 |
0,9997 |
0,0003 |
6,0289 |
|
|
230 |
0,9675 |
0,0325 |
2,9503 |
480 |
0,9998 |
0,0002 |
6,1572 |
|
|
240 |
0,9725 |
0,0275 |
3,0786 |
490 |
0,9999 |
0,0001 |
6,2854 |
|
|
500 |
1 |
0 |
6,4137 |
|
||||
-
Построим зависимость
 f
(θ):
f
(θ):
-
Заполним следующую таблицу:
|
|
|
|
|
|
|
|
0 |
1 |
1 |
1 |
1 |
1 |
|
0,1283 |
0,971 |
0,8717 |
0,8464 |
0,7516 |
0,7298 |
|
0,2565 |
0,89 |
0,7435 |
0,6617 |
0,5199 |
0,4627 |
|
0,3848 |
0,79 |
0,6152 |
0,486 |
0,3044 |
0,2405 |
|
0,5131 |
0,68 |
0,4869 |
0,3311 |
0,1054 |
0,0717 |
|
0,6414 |
0,59 |
0,3586 |
0,2116 |
-0,0771 |
-0,0455 |
|
0,7696 |
0,5 |
0,2304 |
0,1152 |
-0,2431 |
-0,1216 |
|
0,8979 |
0,43 |
0,1021 |
0,0439 |
-0,3927 |
-0,1689 |
|
1,0262 |
0,36 |
-0,0262 |
-0,0094 |
-0,5259 |
-0,1893 |
|
1,1545 |
0,31 |
-0,1545 |
-0,0479 |
-0,6426 |
-0,1992 |
|
1,2827 |
0,27 |
-0,2827 |
0,0763 |
-0,7427 |
-0,2005 |
|
1,411 |
0,22 |
-0,411 |
-0,0904 |
-0,8265 |
-0,1818 |
|
1,5393 |
0,19 |
-0,5393 |
-0,1025 |
-0,8939 |
-0,1698 |
|
1,6676 |
0,16 |
-0,6676 |
-0,1068 |
-0,9448 |
-0,1512 |
|
1,7958 |
0,14 |
-0,7958 |
-0,1114 |
-0,9792 |
-0,1371 |
|
1,9241 |
0,12 |
-0,9241 |
-0,1109 |
-0,9971 |
-0,1197 |
|
2,0524 |
0,1 |
-1,0524 |
-0,1052 |
-0,9986 |
-0,0997 |
|
2,1807 |
0,09 |
-1,1807 |
-0,1063 |
-0,9837 |
-0,0885 |
|
2,3089 |
0,07 |
-1,3089 |
-0,0916 |
-0,9523 |
-0,0667 |
|
2,4372 |
0,062 |
-1,4372 |
-0,0891 |
-0,9044 |
-0,0561 |
|
2,5655 |
0,0525 |
-1,5655 |
-0,0822 |
-0,8401 |
-0,0441 |
|
2,6938 |
0,05 |
-1,6938 |
-0,0847 |
-0,7593 |
-0,0379 |
|
2,822 |
0,0375 |
-1,822 |
-0,0683 |
-0,6622 |
-0,0248 |
|
2,9503 |
0,0325 |
-1,9503 |
-0,0634 |
-0,5485 |
-0,0178 |
|
3,0786 |
0,0275 |
-2,0786 |
-0,0572 |
-0,4183 |
-0,0115 |
|
3,2069 |
0,0235 |
-2,2069 |
-0,0519 |
-0,2717 |
-0,0064 |
|
3,3351 |
0,02 |
-2,3351 |
-0,0467 |
-0,1088 |
-0,0022 |
|
3,4634 |
0,017 |
-2,4634 |
-0,0419 |
0,0708 |
0,0012 |
|
3,5917 |
0,015 |
-2,5917 |
-0,0389 |
0,2668 |
0,004 |
|
3,7199 |
0,0125 |
-2,7199 |
-0,0339 |
0,479 |
0,0059 |
|
3,8482 |
0,01 |
-2,8482 |
-0,0285 |
0,7079 |
0,0071 |
|
3,9765 |
0,0085 |
-2,9765 |
-0,0253 |
0,9533 |
0,0081 |
|
4,1048 |
0,0075 |
-3,1048 |
-0,0233 |
1,2151 |
0,0091 |
|
4,233 |
0,0065 |
-3,233 |
-0,021 |
1,4931 |
0,0097 |
|
4,3613 |
0,005 |
-3,3613 |
-0,0168 |
1,7879 |
0,0089 |
|
4,4896 |
0,0047 |
-3,4896 |
-0,0164 |
2,0991 |
0,0099 |
|
4,6179 |
0,0042 |
-3,6179 |
-0,0152 |
2,4267 |
0,0102 |
|
4,7461 |
0,0035 |
-3,7461 |
-0,0131 |
2,7705 |
0,0097 |
|
4,8744 |
0,0025 |
-3,8744 |
-0,0097 |
3,1311 |
0,0078 |
|
5,0027 |
0,0024 |
-4,0027 |
-0,0096 |
3,5081 |
0,0084 |
|
5,131 |
0,0023 |
-4,131 |
-0,0095 |
3,9016 |
0,0089 |
|
5,2592 |
0,002 |
-4,2592 |
-0,0085 |
4,3112 |
0,0086 |
|
5,3875 |
0,0015 |
-4,3875 |
-0,0066 |
4,7376 |
0,0071 |
|
5,5158 |
0,0014 |
-4,5158 |
-0,0063 |
5,1804 |
0,0073 |
|
5,6441 |
0,0013 |
-4,6441 |
-0,006 |
5,6397 |
0,0073 |
|
5,7723 |
0,0005 |
-4,7723 |
-0,0024 |
6,1151 |
0,0031 |
|
5,9006 |
0,0004 |
-4,9006 |
-0,002 |
6,6073 |
0,0026 |
|
6,0289 |
0,0003 |
-5,0289 |
-0,0015 |
7,116 |
0,0021 |
|
6,1572 |
0,0002 |
-5,1572 |
-0,001 |
7,6412 |
0,0015 |
|
6,2854 |
0,0001 |
-5,2854 |
-0,0005 |
8,1823 |
0,0008 |
|
6,4137 |
0 |
-5,4137 |
0 |
8,7404 |
0 |
По данным таблицы вычислим
![]()


Запишем аппроксимирующую передаточную функцию:

-
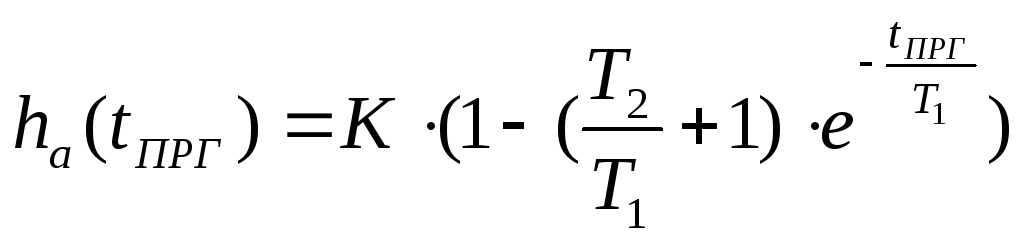
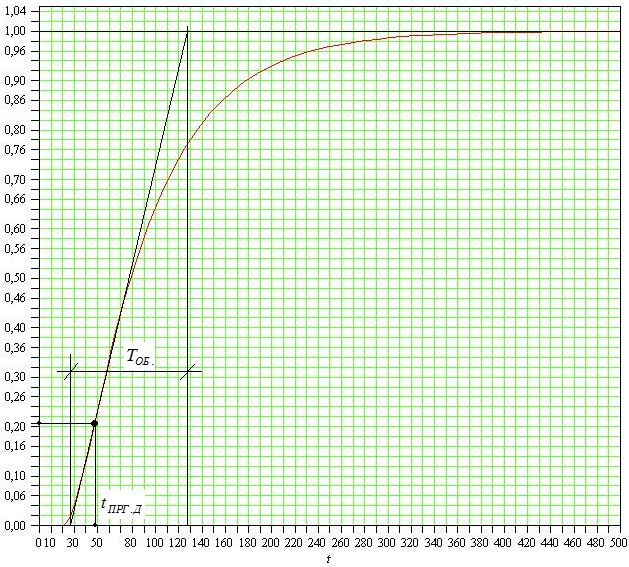
Используем метод аппроксимации переходной характеристики решением дифференциального уравнения второго порядка и передаточной функцией вида:
![]() при τ=0(с),где
при τ=0(с),где
![]() ;
;
![]() .
.
Решение дифференциального уравнения
соответствующего этой передаточной
функции имеет вид:
 (1).
Дважды дифференцируя выражение (1) и,
приравнивая вторую производную к нулю,
получим выражение для определения
ординаты и абсциссы точки перегиба, а
также для коэффициента наклона касательной
к переходной характеристики в этой
точке:
(1).
Дважды дифференцируя выражение (1) и,
приравнивая вторую производную к нулю,
получим выражение для определения
ординаты и абсциссы точки перегиба, а
также для коэффициента наклона касательной
к переходной характеристики в этой
точке:
 ;
;
 ;
;
 ,
где
,
где
![]() -эквивалентная
постоянная времени объекта, определяемая
из его переходной характеристики.
-эквивалентная
постоянная времени объекта, определяемая
из его переходной характеристики.
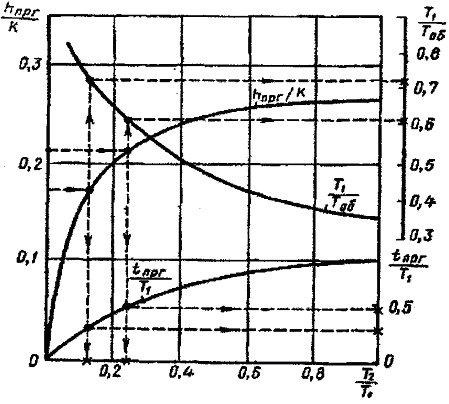
![]() По диаграммам определяем
По диаграммам определяем
![]() ;
;
![]() и
и
![]()
![]()
![]()
![]() и
и
![]() .
.
![]() .Найденное
значение
.Найденное
значение
![]() ‹
‹
![]()
![]() вводим
добавочное запаздывание
вводим
добавочное запаздывание
![]() (с).
Запишем аппроксимирующую передаточную
функцию:
(с).
Запишем аппроксимирующую передаточную
функцию:
![]() .
.
-
Получение передаточной функции объекта управления с помощью аппроксимацией дифференциальным уравнением второго порядка:

![]()
![]()
![]() .
Из диаграммы Ольденбурга-Сарториуса
определим
.
Из диаграммы Ольденбурга-Сарториуса
определим
![]() и
и![]() :
:
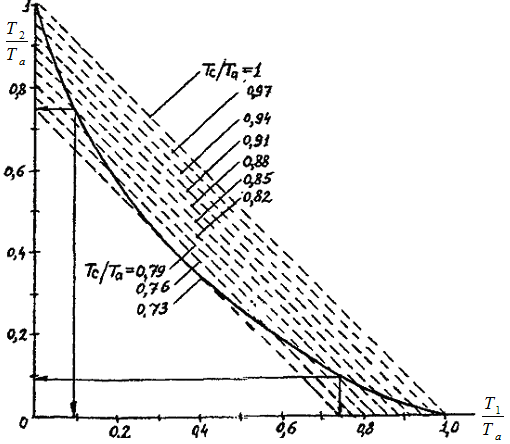
![]() Идентификационная
модель динамики имеет вид:
Идентификационная
модель динамики имеет вид:
![]() ,
где
,
где
![]()
![]()
![]() -
аппроксимирующая передаточная функция.
-
аппроксимирующая передаточная функция.
-
Решим дифференциальные уравнения, соответствующие трем полученным аппроксимирующим передаточным функциям, построим кривые разгона и сравнить их с исходной: