

-
Рассчитаем и построим афх, ачх, фчх объекта регулирования:
![]()
Разложим передаточную функцию на простые дроби без учета запаздывания:
![]()
Получим систему уравнений:
Решаем данную систему:
![]()
![]()
![]()
Избавимся от комплексного числа в знаменателях дроби, помножив числитель и знаменатель на комплексно сопряженные числа:
![]()
Приведем дроби к общему знаменателю, преобразуем, разделим действительную и мнимые части:

Запишем выражение для АЧХ, ФЧХ и АФХ:
АФХ:
![]() ;
;
АЧХ: запаздывание не учитывается, т.к. оно не влияет на вид АЧХ, т.к. для звена запаздывания АЧХ равна всегда 1:
![]()
ФЧХ: запаздывание влияет на вид ФЧХ, поэтому результирующее выражение для ФЧХ запишел как алгебраическую сумму ФЧХ звена без запаздывания и ФЧХ запаздывания:
![]()
Таблица значений АЧХ.
|
|
|
|
|
|
0 |
2,0056 |
0,23 |
0,0358 |
|
0,01 |
1,6904 |
0,24 |
0,0325 |
|
0,02 |
1,2166 |
0,25 |
0,0297 |
|
0,03 |
0,8801 |
0,26 |
0,0271 |
|
0,04 |
0,6584 |
0,27 |
0,0249 |
|
0,05 |
0,5076 |
0,28 |
0,0228 |
|
0,06 |
0,4008 |
0,29 |
0,021 |
|
0,07 |
0,3226 |
0,3 |
0,0194 |
|
0,08 |
0,2639 |
0,31 |
0,0179 |
|
0,09 |
0,2189 |
0,35 |
0,0133 |
|
0,1 |
0,1837 |
0,4 |
0,0095 |
|
0,11 |
0,1557 |
0,45 |
0,007 |
|
0,12 |
0,1333 |
0,5 |
0,0053 |
|
0,13 |
0,115 |
0,55 |
0,0041 |
|
0,14 |
0,0999 |
0,6 |
0,0033 |
|
0,15 |
0,0875 |
0,65 |
0,0026 |
|
0,16 |
0,0769 |
0,7 |
0,0021 |
|
0,17 |
0,0681 |
0,75 |
0,0017 |
|
0,18 |
0,0606 |
0,8 |
0,0015 |
|
0,19 |
0,0541 |
0,85 |
0,0012 |
|
0,20 |
0,0485 |
0,9 |
0,001 |
|
0,21 |
0,0437 |
0,95 |
0,0009 |
|
0,22 |
0,0395 |
1 |
0,0008 |
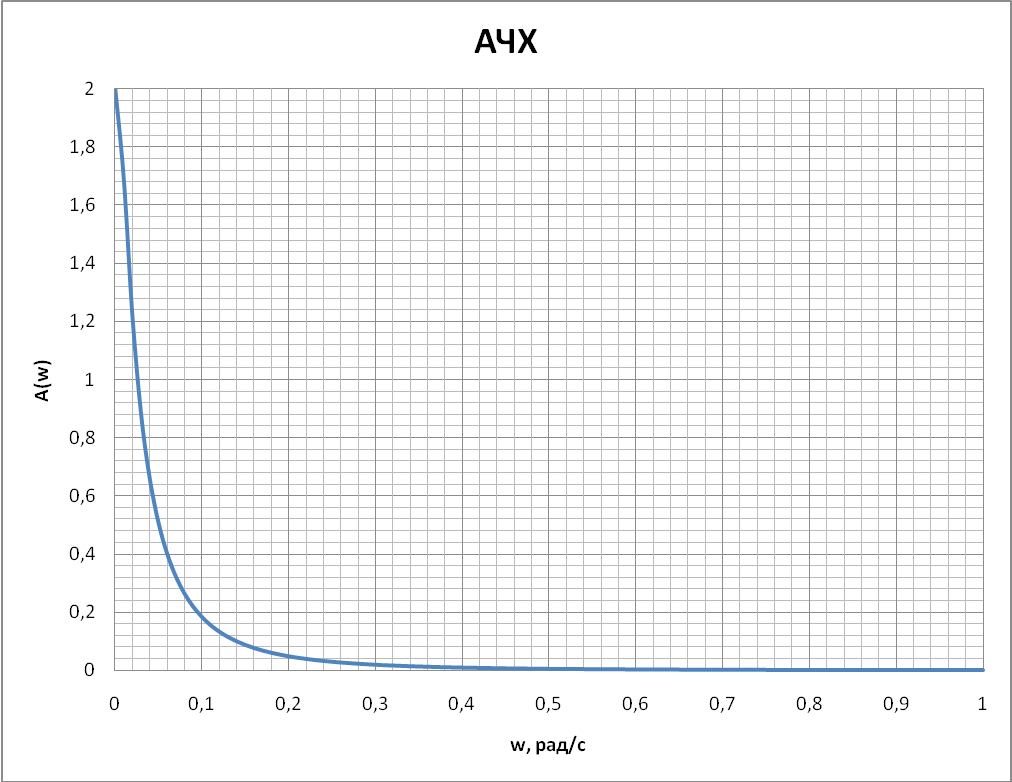
Таблица значений ФЧХ.
|
|
|
|
|
|
|
0 |
0 |
0,51 |
-13,0904 |
|
|
0,01 |
-0,8948 |
0,52 |
-13,2826 |
|
|
0,02 |
-1,5702 |
0,53 |
-13,4745 |
|
|
0,03 |
-2,0862 |
0,54 |
-13,666 |
|
|
0,04 |
-2,4701 |
0,55 |
-13,8572 |
|
|
0,05 |
-2,8494 |
0,56 |
-14,0481 |
|
|
0,06 |
-3,1952 |
0,57 |
-14,2386 |
|
|
0,07 |
-3,5168 |
0,58 |
-14,4289 |
|
|
0,08 |
-3,8197 |
0,59 |
-14,6189 |
|
|
0,09 |
-4,1081 |
0,6 |
-14,8086 |
|
|
0,1 |
-4,3845 |
0,61 |
-14,998 |
|
|
0,11 |
-4,6513 |
0,62 |
-15,1872 |
|
|
0,12 |
-4,9099 |
0,63 |
-15,3762 |
|
|
0,13 |
-5,1617 |
0,64 |
-15,5649 |
|
|
0,14 |
-5,4077 |
0,65 |
-15,7534 |
|
|
0,15 |
-5,6486 |
0,66 |
-15,9417 |
|
|
0,16 |
-5,8852 |
0,67 |
-16,1297 |
|
|
0,17 |
-6,118 |
0,68 |
-16,3176 |
|
|
0,18 |
-6,3474 |
0,69 |
-16,5053 |
|
|
0,19 |
-6,5739 |
0,7 |
-16,6927 |
|
|
0,2 |
-6,7976 |
0,71 |
-16,88 |
|
|
0,21 |
-7,0189 |
0,72 |
-17,0672 |
|
|
0,22 |
-7,238 |
0,73 |
-17,2541 |
|
|
0,23 |
-7,4551 |
0,74 |
-17,4409 |
|
|
0,24 |
-7,6704 |
0,75 |
-17,6275 |
|
|
0,25 |
-7,884 |
0,76 |
-17,814 |
|
|
0,26 |
-8,096 |
0,77 |
-18,0004 |
|
|
0,27 |
-8,3065 |
0,78 |
-18,1865 |
|
|
0,28 |
-8,5157 |
0,79 |
-18,3725 |
|
|
0,29 |
-8,7237 |
0,8 |
-18,5585 |
|
|
0,3 |
-8,9304 |
0,81 |
-18,7443 |
|
|
0,31 |
-9,1361 |
0,82 |
-18,93 |
|
|
0,32 |
-9,3407 |
0,83 |
-19,1155 |
|
|
0,33 |
-9,5443 |
0,84 |
-19,3009 |
|
|
0,34 |
-9,747 |
0,85 |
-19,4862 |
|
|
0,35 |
-9,9489 |
0,86 |
-19,6714 |
|
|
0,36 |
-10,1499 |
0,87 |
-19,8565 |
|
|
0,37 |
-10,3501 |
0,88 |
-20,0415 |
|
|
0,38 |
-10,5496 |
0,89 |
-20,2264 |
|
|
0,39 |
-10,7484 |
0,9 |
-20,4112 |
|
|
0,4 |
-10,9466 |
0,91 |
-20,5959 |
|
|
0,41 |
-11,1441 |
0,92 |
-20,7804 |
|
|
0,42 |
-11,341 |
0,93 |
-20,965 |
|
|
0,43 |
-11,5374 |
0,94 |
-21,1494 |
|
|
0,44 |
-11,7332 |
0,95 |
-21,3338 |
|
|
0,45 |
-11,9284 |
0,96 |
-21,518 |
|
|
0,46 |
-12,1232 |
0,97 |
-21,7022 |
|
|
0,47 |
-12,3175 |
0,98 |
-21,8863 |
|
|
0,48 |
-12,5114 |
0,99 |
-22,0703 |
|
|
0,49 |
-12,7048 |
1 |
-22,2542 |
|
|
0,5 |
-12,8978 |
|
||
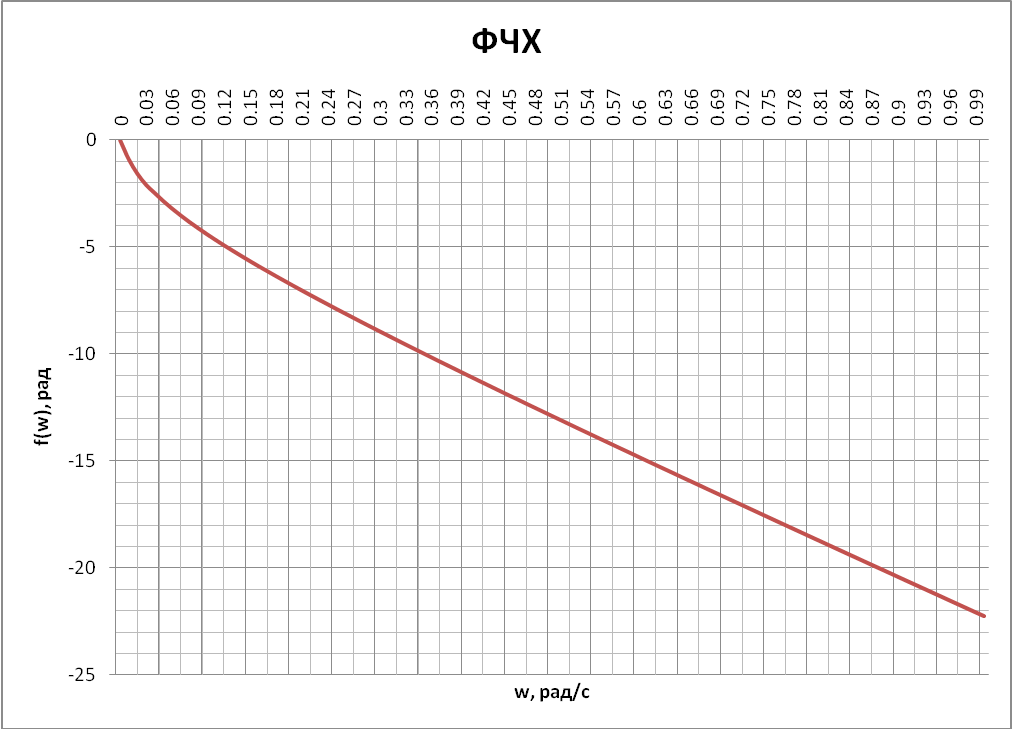
Таблица значений АФХ.
|
|
|
|
|
|
|
|
0 |
2 |
0 |
0,05 |
-0,4922 |
-0,1235 |
|
0,001 |
1,9869 |
-0,1912 |
0,055 |
-0,4487 |
-0,0312 |
|
0,002 |
1,948 |
-0,3774 |
0,06 |
-0,3987 |
0,0399 |
|
0,003 |
1,8853 |
-0,5542 |
0,065 |
-0,3464 |
0,0934 |
|
0,004 |
1,8013 |
-0,7177 |
0,07 |
-0,2944 |
0,1312 |
|
0,005 |
1,6995 |
-0,8648 |
0,075 |
-0,2444 |
0,1584 |
|
0,006 |
1,5838 |
-0,9935 |
0,085 |
-0,1547 |
0,1834 |
|
0,007 |
1,4579 |
-1,1029 |
0,095 |
-0,0814 |
0,1829 |
|
0,008 |
1,3257 |
-1,1927 |
0,1 |
-0,0511 |
0,1764 |
|
0,009 |
1,1903 |
-1,2635 |
0,15 |
0,0166 |
0,1429 |
|
0,01 |
1,0549 |
-1,3165 |
0,2 |
0,0411 |
-0,0258 |
|
0,011 |
0,9216 |
-1,353 |
0,25 |
-0,0023 |
-0,0296 |
|
0,012 |
0,7924 |
-1,3748 |
0,3 |
-0,0175 |
-0,0084 |
|
0,013 |
0,6687 |
-1,3837 |
0,35 |
-0,0112 |
0,0072 |
|
0,014 |
0,5513 |
-1,3813 |
0,4 |
-0,00003 |
0,00953 |
|
0,015 |
0,4411 |
-1,3693 |
0,45 |
0,0058 |
0,0039 |
|
0,016 |
0,3382 |
-1,3494 |
0,5 |
0,0049 |
-0,00196 |
|
0,017 |
0,2428 |
-1,3228 |
0,55 |
0,00095 |
-0,004 |
|
0,018 |
0,1548 |
-1,2909 |
0,6 |
-0,00213 |
-0,00244 |
|
0,019 |
0,0739 |
-1,2547 |
0,65 |
-0,0026 |
0,00024 |
|
0,02 |
0,0002 |
-1,2152 |
0,7 |
-0,0011 |
0,0018 |
|
0,025 |
-0,2767 |
-0,9919 |
0,75 |
0,0007 |
0,0016 |
|
0,03 |
-0,4338 |
-0,7651 |
0,85 |
0,00095 |
-0,00077 |
|
0,035 |
-0,5102 |
-0,5602 |
0,9 |
-0,00004 |
-0,00104 |
|
0,04 |
-0,5337 |
-0,3852 |
0,95 |
-0,0007 |
-0,0005 |
|
0,045 |
-0,5235 |
-0,2404 |
1 |
-0,0007 |
-0,0002 |

-
Рассчитаем оптимальные настройки ПИД-регулятора методом расширенных частотных характеристик:
Задано по условию
![]() -
показатель колебательности. Перейдем
от
-
показатель колебательности. Перейдем
от
![]() к
к
![]() :
:
![]() -
степень колебательности.
-
степень колебательности.
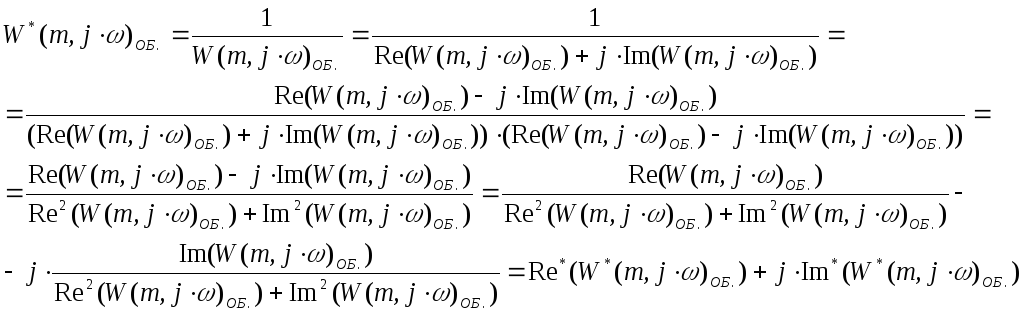
Запишем выражения для определения настроек ПИД-регулятора через расширенный частотные характеристики:
![]()
Где
![]() инверсная
расширенная мнимая частотная характеристика
объекта управления;
инверсная
расширенная мнимая частотная характеристика
объекта управления;
![]() инверсная расширенная вещественная
частотная характеристика объекта
управления.
инверсная расширенная вещественная
частотная характеристика объекта
управления.
![]() расширенная
АФХ обекта.
расширенная
АФХ обекта.
![]()
![]()
![]()
С помощью приближенных формул ВТИ для
определения настроек регулятора
определим предварительное значение
настроечного параметра ПИД-регулятора
-
![]() :
:
-
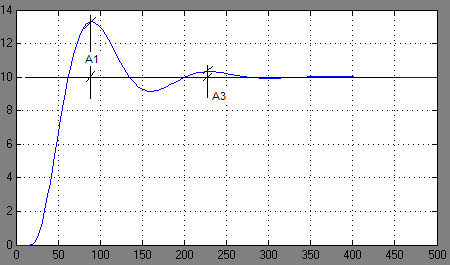
Найдем характеристики переходного процесса:
 ;
;
 ;
;
 .
. -
Определим скорость разгона:
 .
. -
Определим степень самовыравнивания:
 ,
где
,
где амплитуда
ступенчатого воздействия.
амплитуда
ступенчатого воздействия.
-
Найдем произведение
 .
. -
Используя таблицу №1, найдем выражения для определения настроек регуляторов.
Таб.№1
|
Регулятор |
|
0,2< |
||||
|
|
|
|
|
|
|
|
|
П |
|
- |
- |
|
- |
- |
|
ПИ |
|
|
- |
|
|
- |
|
ПИД |
|
|
|
|
|
|
|
Регу-лятор |
|
|
|
|
ПИД |
|
|
|
![]() Линии
раной степени колебательности для
ПИД-регулятора будем строить для значений
Линии
раной степени колебательности для
ПИД-регулятора будем строить для значений
![]() 0,01
0,01![]() ;
0,05
;
0,05![]() ;
0,1
;
0,1![]() ;
;
![]() ;
0,2
;
0,2![]() ;
2
;
2![]() ;
0,3
;
0,3![]() ;
0,4
;
0,4![]() ;
0,5
;
0,5![]() ;
0,6
;
0,6![]() ;
0,7
;
0,7![]() ;0,8
;0,8![]() ;0,9
;0,9![]() ;
;![]() ;1,1
;1,1![]() ;1,2
;1,2![]() ;1,3
;1,3![]() .
.
|
|
|
|
|
|
|
0,0348 |
0,2469 |
0,8436 |
0,0132 |
4774 |
|
0,0356 |
1,2345 |
0,8864 |
0,0139 |
4737 |
|
0,036 |
2,469 |
0,9273 |
0,0155 |
4798 |
|
0,0384 |
4,938 |
1,0426 |
0,0175 |
4739 |
|
0,0444 |
7,407 |
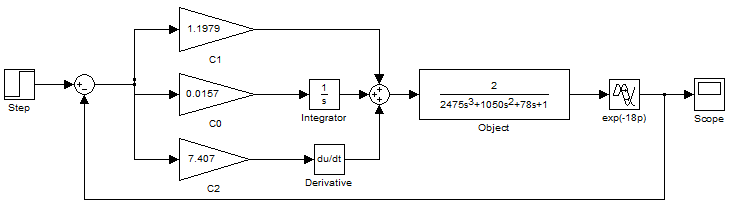
1,1979 |
0,0157 |
4320 |
|
0,042 |
9,876 |
1,2483 |
0,0236 |
4910 |
|
0,0444 |
12,345 |
1,3584 |
0,0267 |
4996 |
|
0,0468 |
14,814 |
1,4648 |
0,0304 |
5152 |
|
0,0492 |
17,283 |
1,5676 |
0,0346 |
5363 |
|
0.0516 |
19,752 |
1,6665 |
0,0394 |
5646 |
|
0,054 |
22,221 |
1,7617 |
0,0451 |
6042 |
|
0,0576 |
24,69 |
1,8456 |
0,0509 |
6437 |
|
0,0612 |
27,159 |
1,9157 |
0.0581 |
7105 |
|
0,066 |
29,628 |
1,95 |
0,0667 |
8043 |
|
0,0744 |
32,097 |
1,8547 |
0,0791 |
10460 |
Из таблицы находим, что оптимальные
настройки ПИД-регулятора:
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() время
изодрома;
время
изодрома;
![]() время
предварения.
время
предварения.
![]()

-
Получим передаточную функцию замкнутой системы по задающему воздействию:
![]() .
.

После преобразований получим:
