

СОДЕРЖАНИЕ
|
Введение |
4 | |
|
1. Описание принципа действия САР ЧВ ДПТ «ОМЕГА-12» |
5 | |
|
2. Определение передаточные функции элементов |
6 | |
|
3. Построение структурной схемы исходной САР |
8 | |
|
4. Оценка устойчивости и стабилизация САР. Параметрическая оптимизация. |
9 | |
|
4.1 Стабилизация разомкнутой САР |
9 | |
|
4.2 Стабилизация и предварительная коррекция замкнутой САР |
12 | |
|
4.3. Структурно-параметрическая оптимизация. |
14 | |
|
5. Оценка качества регулирования САР ЧВ ДПТ «ОМЕГА 12». |
19 | |
|
Заключение |
20 | |
|
Список использованной литературы |
21 | |
|
ПРИЛОЖЕНИЕ. САР при работе с нагрузкой (возмущением) |
22 | |
Введение
Теория автоматического управления – научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических системах управления. При помощи ТАУ возможно описания процессов любой физической природы, что требует широких знаний по многим дисциплинам. Именно для овладения основами ТАУ предназначена эта курсовая работа.
Цель курсовой работы: оптимизация типичной линейной системы автоматического регулирования с использованием программы VisSim.
Для достижения цели студенту необходимо решить ряд задач: анализ исходной САР, построение структурной и аналитической моделей САР, оценка устойчивости САР, ее оптимизация и оценка качества модели.
Выполнение этих задач потребует от студента получения новых знаний по предмету ТАУ, освоение специализированных моделирующих программ и постоянной работы с литературой.
1. Описание принципа действия сар чв дпт «омега-12»
В данном пункте приведено для пояснения принципа действия САР и описания ее работы в статике и динамике [2, c.39].
Функциональная схема САР ЧВ ДПТ, предусмотренная заданием, приведена на рисунке 1.
Р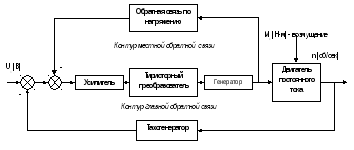 исунок
1. Функциональная схема САР ЧВ ДПТ
«ОМЕГА-12».
исунок
1. Функциональная схема САР ЧВ ДПТ
«ОМЕГА-12».
U3 – напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ; Mc – момент силы сопротивления (возмущение), приложенный к валу двигателя постоянного тока
Данная САР является системой с замкнутыми цепями воздействий, т.е. в ней имеются два контура обратной связи: главной жесткой обратной связи, реализующая принцип управления по отклонению [2, c.20], и местной гибкой обратной связи, введенной для повышения устойчивости САР в переходных режимах.
а) Работа САР ЧВ ДПТ «ОМЕГА-12» в статике:
При постоянной управляемой n и управляющей U3 величинах. Левый сумматор отображает сигнал рассогласования e = U3 – Uтг, который в статике мал. Сигнал проходит усиление через цепочку звеньев (усилитель, тиристорный преобразователь, генератор), преобразуясь в управляющее напряжение для вращения двигателя. Т. к. результирующее усиление цепочки велико, то постоянное значение частоты вращения двигателя n можно получить лишь при очень малых значениях e. Т. о. частота n будет с некоторой точностью пропорциональна сигналу задания, т. е. САР выполняет функцию слежения[2, c.18] в статике.
б) Работа САР ЧВ ДПТ «ОМЕГА-12» в динамике:
Слежение. С изменением задания происходит изменение отклонение. Отклонение отрабатывается усилителем, тиристорным преобразователем и генератором. Т.к. эта цепочка имеет инертность, то частота вращения двигателя будет плавно изменяться, пока сигнал рассогласования не устремиться к нулю.
Стабилизация. С изменением возмущения, изменяется частота вращения вала двигателя. Благодаря главной обратной связи изменяется и сигнал рассогласования, значение которого усиливается и компенсирует влияние возмущения.
Обратная связь по напряжению - инерционно-дифференцирующее звено [2, c.115], следовательно, ее влияние будет проявляться только в динамики, сглаживая колебания напряжения на обмотке якоря двигателя.
Из-за наличия обратных связей в САР может проявиться динамическая неустойчивость [2, c 159], поэтому необходимо проверить работоспособность обратных связей. В случае неустойчивости САР необходимо откорректировать параметры контуров обратных связей. Но для этого надо знать передаточные функции каждого элемента САР.
2. Определение передаточные функции элементов
Для построения структурно-алгоритмической схемы необходимо определить передаточные функции каждого звена САР. На практике передаточные функции рассчитываются из дифференциальных уравнений с использованием операционного исчисления. В данном курсовом проекте заданием определены модели элементов САР и общий вид передаточных функций. В данном пункте производится расчет уже определенных заданием передаточных функций моделей элементов САР.
Передаточные функции элементов САР ЧВ ДПТ «ОМЕГА-12» (N = 12, - номер варианта задания):
двигатель постоянного тока (ДПТ) с независимым возбуждением является инерционным звеном второго порядка [2, c. 108, с. 138]:
kду = 0.1(12 + N), [об/(сек·В)]; кдв = 0.05(15 + N), [об/(сек·Н·м)]; Tя = 0.01 (6 + 0.32N),с; Tм = 0.1 (5 + 0.5N),с.
- по управляющему воздействию напряжения генератора:
![]()
- по возмущающему воздействию – моменту нагрузки, приложенной на валу двигателю:
![]()
Тахогенератор – безынерционное звено: kтг = 0.01(2 + 0.3N), [В·сек/об]. Входная величина n - частота вращения вала - имеет размерность [об/сек], выходная - Uтг c размерностью [В]. Передаточный коэффициент имеет размерность отношение размерности выходной величины к входной.
![]()
Гибкая обратная связь по напряжению – реальное (инерционное) дифференцирующее звено kосн = 0.1(1.5 + 0.1N); Tосн = 0.01(5 + N),c.
![]()
Генератор – инерционное звено первого порядка [2, c. 97, c. 138] kг = 0.1(13 + 0.1N); Tг = 0.01 (8 + N), с:
![]()
Тиристорный преобразователь – инерционное звено первого порядка. kтп = (15+2N) ; Tтп = (0.05 + 0.001N), с [2, c. 97, c. 138]:
![]()
Усилитель – инерционное звено первого порядка [2, c. 97] ky = (20+N); Ty=(0.06 + 0.001N), с.:
![]()
Полученные передаточные функции элементов позволяют построить структурно-алгоритмическую модель САР, а также получить общую передаточную функцию всей САР.