

4.3. Структурно-параметрическая оптимизация.
а) Внедрение ПИ-регулятора
Изменением лишь параметров системы (параметрич. оптимизация) не удалось добиться желаемого качества регулирования САР, поэтому необходимо внедрить новое звено в контур главной обратной связи - ПИ-регулятор[1; 2,c. 145].
ПИ-регулятор имеет следующую передаточную функцию:
![]()
где kp – коэффициент усиления ПИ-регулятора, Tp – постоянная времени ПИ-регулятора.

Рисунок 8. Замкнутая САР с П-регулятором. Система устойчива, но качество регулирования относительно плохое.
Для внедрения регулятора в систему необходимо найти его настроечные параметры (для данной САР). Их нахождение будет производится простым приближенным методом с использованием логарифмических частотных характеристик (рисунок 9), предложенным в [1].

Рисунок 9. Определение постоянной времени по ЛАЧХ системы с требуемыми запасами устойчивости.
Для ЛАЧХ, у которой выполнены требования к запасам устойчивости по фазе и амплитуде (рисунок 9), находится точка пересечения касательных 0 дБ/дек и -20 дБ/дек. Частота сопряжения этой точки является обратной величиной постоянной времени ПИ-регулятора. В данном случае частота сопряжения равна ωсоп = 1/Т =0,55рад/с, тогда Tp = 1,82сек.
Для САР с выполненными запасами устойчивости, в [1] рекомендуется использование коэффициента ПИ-регулятора равным kp = 0.5 единиц. Т.к. в системе уже присутствует П-регулятор, то его влияние можно учесть в ПИ-регуляторе, тогда коэффициент усиления ПИ-регулятора будет равенkр= =0.025·0.5 = 0.0125 единиц.
Полученный регулятор улучшит качество регулирование, но его параметры необходимо откорректировать, т. к. они вычислялись приближенно.
б) Уточнение настроечных параметров ПИ-регулятора и усилителя
Переходная функция САР без уточнения параметров на рис.10

Рисунок 10. Переходная функция САР без уточнения параметров ПИ-регулятора. Ошибка регулирования 0%. Переходной процесс слишком длинный – 6,8 сек. Нужно уточнить параметры регулятора.
Уточнение постоянной времени не принесло ощутимого результата, ее изменение лишь портит переходную характеристику. Ослабление коэффициента усиления ПИ-регулятора до kp = 0,0095 единиц позволило немного уменьшить перерегулирование. В ходе уточнения было замечено, что передаточный коэффициент усилителя вносит большой «вклад» в перерегулирование, поэтому его было решено ослабить. Все эти действия значительно улучшили переходную характеристику системы.
Т.о. при структурно-параметрической оптимизации получена схема САР «ОМЕГА 12», изображенная на рисунке 11, ее увеличенная в масштабе переходная функция на рисунке 12.
ЛАЧХ и ЛФЧХ для разомкнутого контура оптимизированной САР "ОМЕГА 12" приведены на рисунке 13.

Рисунок 11. Оптимизированная модель САР "Волна В-0" и ее переходная функция. Для удобства сравнения приведена и увеличенная в 5 раз переходная функция двигателя постоянного тока.
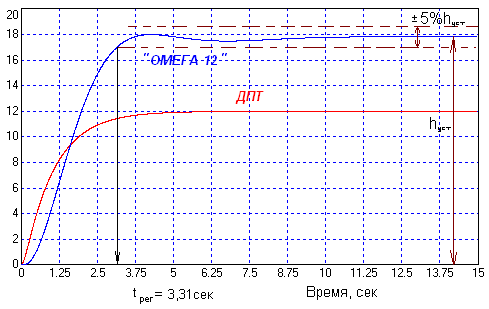
Рисунок 12. Переходные функции САР "ОМЕГА 12" и ее объекта управления – ДПТ (значения увеличены в 5 раз). Окончательная корректировка ПИ-регулятора и усилителя ослабило перерегулирование, так, что оно не выходит из 10%-процентного коридора. Это вдвое уменьшило время регулирование, близкое к автономному двигателю.

Рисунок 13 . ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР "ОМЕГА 12". Из рисунка видно, обеспечены хорошие запасы устойчивости как по фазе, так и по амплитуде. Линейно увеличивающаяся переходная функция разомкнутого контура объясняется наличием интегратора в ПИ-регуляторе.