

Содержание
6.1 Построение переходного процесса с выбранными оптимальными настройками 49
6.2 Построение переходного процесса с настройками выбранными левее оптимальных. 51
6.3 Построение переходного процесса с настройками выбранными правее оптимальных. 52
7 Построение переходных процессов в замкнутой системе по каналам возмущения при τ = 0 55
10.1 Вывод формул для расчета настроек ПД- регулятора – S2 и S1 66
10.2 Выбор пар настроек ПД- регулятора. 67
Список используемой литератуы 83
Задачи курсовой работы по теории автоматического управления
Курсовая работа посвящена анализу и синтезу одноконтурных систем автоматического управления (САУ) и состоит из следующих основных разделов:
анализ динамических свойств объекта управления во временной и частотной областях;
синтез замкнутой системы автоматического управления с пропорционально-интегральным регулятором, со степенью колебательности m=0,221;
построение переходных процессов в замкнутой системе автоматического управления по различным каналам с целью анализа ее качества;
синтез замкнутой системы автоматического управления с пропорционально-дифференциальным регулятором, со степенями колебательности m1=0,147 и m2=0,336;
построение переходных процессов в замкнутой системе автоматического управления с пропорционально-интегральным регулятором по одному из каналов возмущения с целью анализа ее качества
Исходные данные
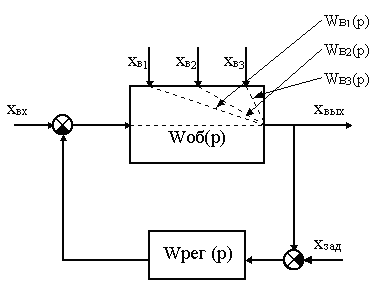
Рисунок 1 – Структурная схема системы автоматического управления
а) Вид передаточной функции по каналу регулирования:
![]() ,
где k
= 1; b1
= 5; τ
= 1.
,
где k
= 1; b1
= 5; τ
= 1.
б) Вид передаточной функции по первому каналу возмущения:
![]() ,
где k
= 0,5; b1
= 1; τ
= 0.
,
где k
= 0,5; b1
= 1; τ
= 0.
в) Вид передаточной функции по второму каналу возмущения:
![]() ,
где k
= 0,5; b1
= 6; τ
= 3.
,
где k
= 0,5; b1
= 6; τ
= 3.
г) Вид передаточной функции по третьему каналу возмущения:
![]() ,
где k
= 0,5; b2
= 400; b1
= 32; τ
= 10.
,
где k
= 0,5; b2
= 400; b1
= 32; τ
= 10.
Анализ и синтез замкнутой системы управления необходимо провести:
а) с ПИ-регулятором на заданную степень колебательности m=0,221.
б) с типом регулятора и условиями расчета его настроек, выбираемыми по номеру варианта регулятора.
Номер варианта регулятора – 3:
Регулятор ПД, выбрать три пары настроек S1 – S2 c кривой равной степени колебательности m=0,221 в области положительных значений настроек и диапазоне частот до частоты среза.
1. Анализ динамических свойств объекта во временной и частотной областях
1.1 Канал регулирования
![]() ,
где k
= 1; b1
= 5; τ
= 1
,
где k
= 1; b1
= 5; τ
= 1
1.1.1 Построение переходного процесса:
Переходную функцию получаем при ступенчатом входном воздействии без учета чистого транспортного запаздывания, которое учтем в окончательной формуле. Расчет удобно проводить методом неопределённых коэффициентов в два этапа.
![]() ;
;![]()
![]()
![]()
![]()
![]()
Разложим изображение на простые дроби:
![]()
![]()

Найдём неизвестные коэффициенты разложения:
![]()
При
![]() :
:![]()
При
![]() :
:![]()
При
![]() :
:![]()
Тогда:
![]() ;
;![]() ;
;![]() ;
;
Следовательно
![]()
![]() ;
;
Используя обратное преобразование Лапласа, получим оригинал переходной функции:
![]() ;
;
Учитывая запаздывание получаем:
![]() ;
;
Подставляя в полученную формулу k =1; b1 =5; τ =1, получаем переходную функцию по каналу регулирования:
![]() ;
;
Данные для построения переходного процесса по каналу регулирования представлены в таблице 1.1.
Таблица 1.1
|
t |
0 |
2.5 |
5 |
7.5 |
10 |
12.5 |
15 |
17.5 |
20 |
|
h(t) |
0 |
0.217 |
1.233 |
2.887 |
4.827 |
7.02 |
9.327 |
11.733 |
14.161 |
График переходного процесса по каналу регулирования представлен на рис. 2.
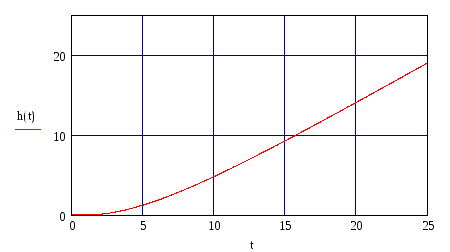
Рисунок 2 – переходная функция по каналу регулирования.
1.1.2 Построение амплитудо-частотной характеристики:
Выражение для АЧХ:
![]() ;
;
![]() ;
;
 ;
;
![]() (1.2)
(1.2)
Подставляя в 1.2 исходные данные (k=1; b1=5; τ=1) получим:
![]() ;
;
Данные построения АЧХ канала регулирования представлены в таблице 1.2.
Таблица 1.2.
|
ω |
0.1 |
0.25 |
0.5 |
0.75 |
1.0 |
1.25 |
1.5 |
1.75 |
2.0 |
|
А(ω) |
10 |
2.499 |
0.737 |
0.345 |
0.193 |
0.125 |
0.08 |
0.065 |
0.049 |
График АЧХ по каналу регулирования представлен на рис. 3.

Рисунок 3 – АЧХ по каналу регулирования.
1.1.3 Построение фазо-частотной характеристики.
![]() =
=![]() =
=![]()
![]() (1.3)
(1.3)
Подставляя в (1.3) исходные данные ( b1=5; τ=1)получим:
![]() ;
;
Данные построения ФЧХ канала регулирования представлены в таблице 1.3.
Таблица 1.3.
|
ω |
0 |
0.5 |
1.0 |
1.5 |
2.0 |
2.5 |
3.0 |
3.5 |
4.0 |
|
(ω) |
-1.57 |
-3.25 |
-3.93 |
-4.51 |
-5.01 |
-5.57 |
-6.07 |
-6.58 |
-7.01 |
График ФЧХ по каналу регулирования представлен на рис.4.

Рисунок 4 – ФЧХ по каналу регулирования.
1.1.4 Амплитудо-фазовая характеристика.
Чтобы получить амплитудно-фазовую характеристику объекта по каналу регулирования, необходимо получить выражения для вещественной и мнимой составляющихWоб(j). Для этого числитель и знаменатель выражения частотной передаточной функции умножим на выражение, сопряженное со знаменателем:
![]() ;
;


![]()
![]() ;
;
![]() ;
;
Для упрощения построения амплитудно-фазовой характеристики воспользуемся формулами:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Данные построения АФХ канала регулирования представлены в таблице 1.4.
Таблица 1.4.
|
Re |
-5.98 |
-5.64 |
-4.78 |
-2.95 |
-0.74 |
-0.258 |
-0.136 |
|
Im |
-99.69 |
-18.56 |
-7.56 |
-1.95 |
-0.089 |
0.16 |
0.141 |
|
ω |
0.01 |
0.05 |
0.1 |
0.2 |
0.5 |
0.8 |
1 |
График АФХ по каналу регулирования представлен на рис. 5.
 Рисунок
5 –АФХ по каналу регулирования.
Рисунок
5 –АФХ по каналу регулирования.
1.2 Первый канал возмущения
![]() ,
где k
= 0,5; b1
= 1; τ
= 0
,
где k
= 0,5; b1
= 1; τ
= 0
Передаточные функции по первому каналу возмущения и по каналу регулирования совпадают, по этому для построения графиков АЧХ, ФЧХ, переходной функции и АФХ, воспользуемся уже имеющимися формулами.