

10.3 Засоби відлагодження мікропроцесорних систем
Для забезпечення і підтримки функціонально складного і трудоємкого процесу відлагодження МПС необхідні інструментальні технічні засоби, тобто додаткові технічні засоби, які використовують в процесі відлагодження, або їх ще називають відлагоджуючими засобами.
Відлагоджувальні засоби МПС у відповідності з різними видами відлагоджувальних процесів поділяють на три групи(рисунок 10.10):для контролю і відлагодження АЗ; для відлагодження ПЗ; для комплексного відлагодження МПС.

Рисунок 10.10- Загальна класифікація відлагоджувальних засобів МП
Засоби для контролю та відлагодження аз мпс
Представляють собою універсальні засоби, незалежно від типу МП і переважно такі, які використовуються в дискретній і аналоговій радіоелектронній апаратурі. Для відлагодження АЗ на схемному рівні широко використовуються осцилографи, вольтметри, частотоміри, генератори імпульсів, елементарні тестери логічного рівня тощо. При виконанні відлагодження на логічному та функціональному рівнях використовують логічні аналізатори, сигнатурні аналізатори, комплекси діагностування та інші засоби.
Засоби для відлагодження ПЗ
Ці засоби орієнтовані на конкретний тип МП. Вони представляють собою відлагоджувальні програмні засоби, які функціонують на інструментальній ЕОМ і поділяються на резидентні та крос-системи. Відлагоджувальні засоби мають в своєму складі такі засоби: компілятори з мов високого рівня, транслятори з мови АСЕМБЛЕРА, редактори зв’язків, програмно-логічні моделі МП та інші засоби для розширення можливостей відлагодження. Компілятори і транслятори є основними засобами програмування, але вони включені в склад засобів відлагодження для проведення корекції ПЗ після виявлення помилок. Відлагодження на програмних засобах зводиться до процесу відлагодження програми на програмно-логічній моделі даного МП. Ці засоби можуть використовуватись автономно, але можуть входити також в апаратно-програмні засоби комплексного відлагодження МПС.
Засоби для комплексного відлагодження МПС
Ці засоби також орієнтовані на конкретний тип МП. Вони мають такий склад:
-
програмні засоби проектування та відлагодження ПЗ;
-
апаратурно-програмні засоби керування, аналізу і контролю функціонування МПС;
-
апаратурно-програмні засоби запису ПЗ в ППЗП;
-
імітатори зовнішнього середовища.
Основним засобом для комплексного відлагодження МПС є внутрішні схемні емулятори.
10.3.1 Засоби відлагодження мікропроцесорних програм
Розробка МПС передбачує два пов’язаних процеси- розробка апаратного та програмного забезпечення. Програмне забезпечення, як правило, розробляється швидше і тоді виникає проблема відлагодження його, адже апаратні засоби ще неготові. В цьому випадку відлагодження проводять на програмно-логічній моделі.
Програмно-логічна модель (ПрЛМ)- це програмний засіб, який включають в склад крос-програмної системи програмування МПС і використовують для проведення цільової МП-програми. Розглянемо структуру ПрЛМ поданої на рисунку 10.10 для забезпечення ПрЛМ функції відлагодження використовуються такі підпрограми:
підпрограма Діалог забезпечує зв’язок користувача з ПрЛМ, дозволяє задавати необхідний режим роботи, вказувати початкові дані і реалізувати наступну роботу по виконанню режиму;
підпрограма визначення режиму забезпечує установку необхідних програмних ознак для подальшої реалізації режиму;
підпрограма установки початкових умов виконує необхідну трансляцію введених користувачем умов: адресних, меж відлагоджуваної програми, меж стека, умов зупинки, дозвіл/заборона переривань тощо;
підпрограма завантажувач реалізує ввід цільової програми з носія інформації інструментальної ЕОМ в область оперативної пам’яті, яка виділена для імітації ПЗП цільового МП;
підпрограма інтерпретатор забезпечує програмну емуляцію архітектури цільового МП;
підпрограма Дизасемблер виконує перевід інтерпретованої команди в мнемонічний вид, який визначається асемблером;
підпрограма індикації формує протокол відлагодження на друкуючому пристрої інструментальної ЕОМ.
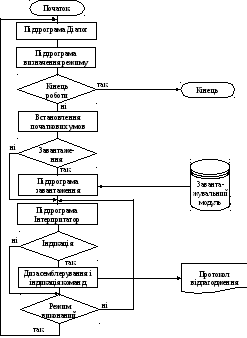
Рисунок 10.10-Узагальнена схема алгоритму ПрЛМ
Розглянемо типові режими роботи ПрЛМ при виконанні цільової програми з зупинками в контрольних точках. Контрольні точки зупинки можна задати за різними умовами:
- зупинка за заданою адресою;
- зупинка після читання інформації з заданої комірки пам’яті або регістра;
-зупинка після запису інформації в задану комірку пам’яті або регістр;
-зупинка по заданому вмісту комірки або регістра( в контрольній точці забезпечується індикація всіх програмно-доступних елементів архітектури цільового МП і їх модифікація);
-
виконання цільової програми з заданої адреси з зупинкою по заданому коду програми;
-виконання цільової програми в покроковому режимі з забезпеченням можливості повної індикації всіх програмно-доступних елементів архітектури за вказівкою користувача і оперативна зміна їх значень(виконання наступної команди здійснюється за вказівкою оператора інструментального комплексу);
-
режим трасування, який дозволяє виконання МП-програми з індикацією елементів архітектури цільового МП, що задіяні при виконанні даної команди, при цьому на індикацію видається мнемоніка виконуваної команди і фізичні адреси операндів;
-
збереження відлагодженої програми в файлі відлагодженого завантажувального модуля.
Імітація вводу/виводу при виконанні цільової програми забезпечується відповідно клавіатурою і дисплеєм інструментального комплексу. При виконанні команд вводу на дисплеї відображається номер порту, який працює на ввід, виконання програми призупиняється. Після відповіді користувача з клавіатури виконання програми відновлюється.
При виконанні команди виводу на екрані дисплея відображається номер порту і виведена інформація. Робота програми при цьому призупиняється.
Ввід/вивід може також відбуватися при допомозі спеціально створених файлів. При виконанні команди вводу інформація зчитується в порт з файла. При виконанні команди виводу інформація записується в файл.
ПрЛМ забезпечує виконання переривань. Вони можуть імітуватись натискуванням певних клавіш.
Крім вказаних режимів роботи, ПрЛМ забезпечує низку сервісних відлагоджувальних функцій. До них відносять лістінг емульованих областей ПЗП цільового МП та розрахунок часу виконання програми.
Робота ПрЛМ може бути завершена (вихід з програми) тільки за бажанням користувача через меню режиму діалогу. При всіх перевагах ПрЛМ, необхідно відмітити, що повне (кінцеве) відлагодження програмного забезпечення МПС виконане бути не може. Кінцеве комплексне відлагодження здійснюють на фізичній моделі МПС або реальному об’єкті в режимі реального часу з використанням апаратурно-програмних засобів відлагодження- схемних емуляторів.