

10 Загальні засади і особливості програмування та відлагодження мікропроцесорних пристроїв
Розробка систем пристроїв керування різноманітним промисловим обладнанням та технологічними процесами на базі сучасних мікропроцесорів і однокристальних мікро-ЕОМ представляє собою складний творчий процес, який поєднує в собі розв’язок схемотехнічних питань та проблем розробок програмних засобів. Необхідного забезпечення (ПЗ) значно перевищує трудоємкість розробки апаратурних засобів (АЗ).
Застосування засобів відлагодження та програмування суттєво прискорює процес розробки мікропроцесорних пристроїв та швидкого переналагодження їх для роботи на іншому об’єкті.
10.1 Особливості структури мікропроцесорних пристроїв
Типова узагальнена структура мікропроцесорної системи (МПС) містить мікропроцесор, ОЗП або пам’ять даних, ПЗП або пам’ять програм, канали або карти вводу/ виводу, схеми зв’язку і спряження з об’єктом (СЗО) і типи МПС та об’єкта (рис. 10.1.). МПС побудовано на базі однокристальної мікро-ЕОМ (ОЕОМ), передбачає в своїй структурі тільки ОЕОМ і СЗО та відповідні типи, оскільки ОЕОМ об’єднує в одному корпусі мікросхеми МП, ОЗП, ПЗП і порти вводу /виводу. Вказаний структурний склад ПМС є практично типовим і постійним для різних МПС. Функціональну індивідуальність МПС для роботи пристрою або інакше ПЗ МПС. Із апаратурних засобів для конкретного об’єкта спеціально вибирають тип МП, кількість і тип ВІС ОЗП і ПЗП, розробляються схеми вводу/виводу, зв’язку і спряження з об’єктом.
Програмні засоби поряд з апаратурними визначають функції і ефективність роботи МПС. Для незмінного складу АЗ МПС шляхом зміни тільки ПЗ можна одержати різні нові функції для даного об’єкта, тобто мікропроцесор забезпечує властивість програмованості об’єкта керування.
Апаратурні засоби МПС забезпечують можливість зберігання ПЗ, даних для обробки, обробки і виконання програми і даних, зв’язку з об’єктом, а ПЗ шляхом керування АЗ і об’єктом реалізують необхідні функціональні можливості МПС і об’єкта, логічні і часові функції.
Таким чином, МПС має двояку основу: апаратурні і програмні засоби, які тісно пов’язані між собою. Можна говорити про функціонально-блочну систему АЗ та ПЗ, що дозволяє розділити їх проектування в часі і ввести його окремо і паралельно.

а)

б)
Рисунок 10.1- Узагальнена структура МПС на базі ВІС мікропроцесорного комплекта (а) на базі ВІС однокристальної мікро-ЕОМ (б).
10.1.2 Етапи проектування мпс
Для визначення ролі та місця засобів програмування та відлагодження МПС розглянемо загальний процес і особливості їх проектування, Основні етапи проектування МПС показані на рис. 10.2.

Рисунок 10.2. Основні етапи проектування МП
На етапах визначення специфікацій і розробки системних вимог до МПС із загальної проблеми, формулюються конкретні технічні вимоги до системи і режимів роботи. Крім того розглядають низку основних вимог, таких як швидкодія, габаритномасові, технологічні і вартісні.
На етапі системно-алгоритмічного проектування МПС, розробляється загальна структура алгоритми функціонування і виділяють функції, які реалізовуються апаратурно. Програмно що дозволяє вести далі паралельну розробку.
Проектування апаратурних засобів МПС виконується традиційно, як для всякої електронної апаратури, а програмних засобів- співпадає з етапами розробки прикладних програм для ЕОМ і включає в себе: аналіз вимог до ПЗ; формалізація задачі, тобто визначення входів і виходів, конкретних процесів обробки; проектування програми; кодування або власне програмування, які завершується одержанням завантажування модуля в машинних кодах цільового мікропроцесора; тестування і автономне відлагодження.
Хоча апаратурні та програмні засоби окремо проходять етапи випробувань і відлагодження, комплексне відлагодження є найважчим етапом, оскільки тут досліджується взаємодія та взаємозв’язок обох частин. Інтеграція ПЗ і АЗ вважається закінченою, а МПС повністю відлагодженою тільки тоді, коли МПС виконує всі необхідні функції і має всі необхідні характеристики і всі значення параметрів на реальних носіях інформації з реальними об’єктами і в реальному часі.
На завершальних етапах готується скоректована технічна документація на ПЗ і АЗ та виготовлення дослідних взірців МПС.
10.2 Загальні засади і особливості програмування МПС.
Етапи розробки ПЗ МПС, за виключення етапу інтегрування ПЗ і АЗ та відлагодження в реальних умовах, співпадають з етапами програмування ЕОМ, одначе мають низку особливостей. З метою їх аналізу розглянемо спочатку основні структури керуючих систем на базі мікропроцесорів і мікро-ЕОМ.
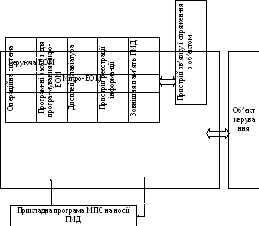
МПС можуть будуватись на базі вмонтованих мікропроцесорних пристроїв або контролерів та на основі керуючих ЕОМ. Вмонтовані МПС- це пристрої керування на основі мікропроцесорів або однокристальних мікро-ЕОМ, що забезпечують керування об’єктом, функціонують в їх складі і сумісно з об’єктом і є його апаратурно-програмним компонентом. Керуюча система на базі ЕОМ є автономною відносно об’єкта системою, яка зв’язана з ним через відповідні пристрої спряженням. Системи цих двох класів мають суттєві відмінності за структурою, функціонуванням і методами проектування (рис. 10.3). Керуюча ЕОМ має постійний склад і характеристики апаратурних засобів для різноманітних об’єктів керування; всі виконувані функції і операції
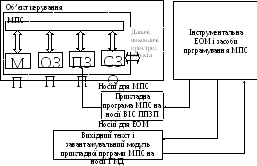
а)
б)
Рисунок 10.3- Структурна схема керуючої системи на основі вмонтованої МПС (а) і керуючої ЕОМ (б) і засобів їх програмування
реалізуються під дією прикладної програми. ЕОМ має повний набір периферійних пристроїв і системних програмних засобів для керування апаратурними засобами, процесом виконання операції та режимами роботи ЕОМ (операційна система), прикладна програма розміщується на зовнішньому магнітному диску (ГМД), в складі ЕОМ є необхідний набір резидентних апаратурних і програмних засобів програмування, цільовим об’єктом програмування є сама ЕОМ. Складена та відлагоджена на ЕОМ прикладна програма виконується на тій же ЕОМ.
Вмонтована МПС по суті є спеціалізованою для кожного об’єкта керування або групи близьких об’єктів, функції реалізовується МПС в результаті інтеграції ПЗ і АЗ, керуюча програма записана в ПЗП. В МПС відсутні периферійні пристрої і системні програмні засоби (операційна система), а також резидентні апаратурні і програмні засоби програмування МПС цільовим об’єктом програмування є МПС. Програмування МПС здійснюється на інструментальній ЕОМ, а виконання в МПС.