

торые зависят от настройки дифференциала термостата. При увеличении дифференциала продолжительность цикла и пределы колебания температуры увеличиваются. Когда температура в охлаждаемом помещении достигнет верхнего установленного предела, термостат включит холодильную установку. После того как температуравохлаждаемомпомещениидостигнетнижнегопредела, термостат подает электрический импульс на отключение установки. При увеличении теплопритоков в вагон продолжительность работы установки повышается.
3.2. Основные понятия об автоматическом регулировании
Системаавтоматическогоуправления— этосовокупностьобъектауправленияиуправляющегоустройства, осуществляющихкакойнибудь процесс полностью или частично без вмешательства обслуживающего персонала. Объект управления — комплекс технических элементов, выполняющих основную технологическую задачу
— характеризуется значениями некоторых величин на его входе и выходе. Если в качестве объекта управления рассматривать рефрижераторный вагон, то величиной на выходе будет температура в грузовом помещении tваг, а величиной на входе — холодопроизводительность холодильной машины Q0.
Величину на выходе, которую требуется поддерживать в определенном интервале, называют регулируемым параметром и обозначают X0. Величина на входе объекта — это параметр, с помощью которого управляют значением величины на выходе.
Внешнеевоздействиенаобъектуправления, вызывающееотклонение регулируемого параметра отисходного значения Х0, называется нагрузкой. В данном случае это будут теплопритоки в вагон Qн. Действительное значение регулируемого параметра X под воздействием нагрузки Qн отклоняется от заданного значения X0. Такое отклонение называется рассогласованием: ∆Х=Х – X0. Воздействие на объект, которое уменьшает рассогласование ∆Х, является регулирующим воздействием. В нашем примере это будет холодопроизводительность машины Q0. ЕслиQ0 = Qн, то ∆Х = 0, а регулируемый параметр не изменяется: Х0 — const.
191

Устройство, воспринимающее рассогласование АХ и воздействующее на объект для уменьшения рассогласования, называется автоматическимрегулятором, илипросто регулятором.
Объект и регулятор образуютсистемуавтоматического регулирования (рис. 3.1). Регулированиеможетвыпол-
няться по нагрузке и рассогласованию. В первом случае регулятор воспринимает изменение нагрузки и на столько же изменяет регулирующее воздействие, поддерживая равенство Q0 = Qн. Однако проще следить за отклонением регулируемого параметра Х0, т.е. изменять регулирующее воздействие Q0 в зависимости от значения ∆Х.
Системы автоматизации различаются по своему назначению: управления, сигнализации, защиты, регулирования и комбинированные. Между собой они отличаются составом элементов и связями между, ними.
Структурная схема автоматической системы определяет, из каких звеньев она состоит. Например, в систему автоматического регулирования входят объект регулирования и автоматический регулятор, состоящий из нескольких элементов — чувствительного элемента, задающего устройства, элемента сравнения, регулирующего органа и т.д.
На рис. 3.2 показана простая одноконтурная система автоматическогорегулирования, широкоприменяющаясяприавтоматизации холодильных установок. Работа объекта характеризуется параметром X на выходе, по которому ведется регулирование. На объект воздействует внешняя нагрузка Qн. Управление осуществляется регулирующим воздействием Q0. Автоматический регулятор должен так изменять величину Q0, чтобы значение X. соответствовало заданному Х0. В системе имеются цепи прямой и обратной связи.
Цепь прямой связи служит для формирования и передачи к объекту регулирующего воздействия Q0; по цепи обратной связи поступает информация о ходе процесса. В цепь прямой связи вхо-
192

Рис. 3.2. Структурная схема автоматического регулирования
дят усилитель (У), исполнительный механизм (ИМ) и регулирующий орган (РО). В цепь обратной связи включен чувствительный элемент (ЧЭ).
Обе цепи замыкаются элементом сравнения (ЭС). В регуляторе могутнеприменятьсяотдельныеэлементы(усилитель, исполнительный механизм). Некоторые детали могут выполнять функции нескольких элементов.
Системаработаетследующимобразом. Чувствительнымэлементом регулятор воспринимает регулируемый параметр X и преобразует его в величину Х1, удобную для дальнейшей передачи.
Эта преобразованная величина поступает в элемент сравнения, на другой вход которого подается сигнал Х2, представляющий собой задание регулятору от устройства 3. В элементе сравнения производится операция вычитания, в результате которой получается рассогласование
∆Х = X – Х0.
Сигнал∆Хзаставляетработатьостальныеэлементысхемы. Вусилителе его мощность повышается до Х3 и воздействует на исполнительный механизм, который преобразует этот сигнал в удобный для использования вид энергии X4 и изменяет положение регулирующегооргана. Врезультатеизменяетсяпотокэнергиииливещества, подводимого к объекту, т.е. изменяется регулирующее воздействие.
По взятому для примера рефрижераторному вагону можно проследитьзавзаимодействием элементовструктурнойсхемы(рис. 3.1 и3.2).
193
Температуру в вагоне X воспринимает термочувствительная систематермостата, преобразуетеевдавлениеХ1 ивоздействуетнапружину термостатаЭС, отрегулированнуюнаопределенноеусилиесжатиявинтом задающего устройства 3. При повышении температуры в вагоне tвагврезультатетеплопритоковQн увеличиваетсярассогласование∆X. При определенном значении tваг замыкаются контакты термостата, включающие электрическую систему управления холодильной машиной У, которая получает энергию Е от внешнего источника. Исполнительные механизмы ИМ электрической системы включают холодильнуюмашинуРО, котораявоздействуетвеличинойQн наобъект.
Структурные схемы других автоматических устройств можно получить из рассмотренной схемы. Сигнализирующая система отличается от системы регулирования тем, что в ней нет исполнительного механизма. Цепь прямой связи разрывается, и сигнал Х3 подается обслуживающему персоналу (звонок, включение сигнальной лампы), которыйидолженпроизвестирегулирование. Всистемеавтоматической защиты вместо исполнительного механизма и регулирующего органаимеетсяустройствоуправления, котороеотключаетхолодильнуюустановку. Всистемах сигнализации изащитысигналХ3 изменяется скачкообразно, когда величина X достигает заданного значения.
Автоматическиерегуляторыклассифицируютсяпоназначению: регуляторы давления, температуры, уровня и т.д. Они различаются конструкцией чувствительного элемента.
Регуляторыбываютпрямогоинепрямогодействия. Еслимощность сигналарассогласованиядостаточнадлявоздействиянарегулирующий орган, регулятор считается прямодействующим. В регуляторах непрямого действия для привода регулирующего органа используется внешний источник энергии Е (электрический, пневматический, гидравлический, комбинированный), подводимойчерезусилительмощностиУ.
В зависимости от способа воздействия на объект различают регуляторы плавного и позиционного (релейного) действия. В регуляторах плавного действия регулирующий орган может занять любое положение в пределах между максимальным и минимальным. У позиционных регуляторов регулирующий орган может занимать два или несколько определенных положений.
По типу задающего элемента регуляторы бывают стабилизирующие, программные, следящие, оптимизирующие. Стабилизирую-
194

щие регуляторы поддерживают регулируемую величину на постоянном заданном уровне. Программные регуляторы изменяют регулируемую величину по заранее намеченной программе, следящие
—в зависимости от изменений какого-нибудь внешнего параметра, Оптимизирующиерегуляторы, анализируявнешниепараметры, обеспечивают оптимальное ведение процесса. В холодильных установках чаще применяются стабилизирующие регуляторы.
Системарегулированиясогласовываетхарактеристикиотдельных элементов машины при изменений их холодопроизводительности.
Характеристикипредставляютсобойзависимостихолодопроизводительности, расхода энергии на работу компрессора и охлаждение конденсатора от внешних условий, т.е. от температуры окружающей среды. Они позволяют установить взаимную связь параметров компрессора, испарителя и конденсатора. Построение характеристик проводят по уравнениям теплового баланса системы «холодильная машина — охлаждаемое помещение» и энергетическимсоотношениям, описывающим работуосновных элементов машины с учетом изменения по времени параметров хладагента и окружающей среды. При этом балансовые и энергетические соотношения представляют в функции температуры охлаждаемого объекта (температуры кипения хладагента) и температуры окружающей среды (температуры конденсации хладагента).
Процессрегулированиямашинынатребуемыйрежимохлаждения или на заданный температурный режим теоретически может быть реализован количественным или качественным способом. Первый предусматриваетизменениерасходахладагентачерезиспаритель, второй
—изменение его параметров. Однако температура охлаждаемого объекта определяется температурой кипения хладагента, которая самоустанавливаетсявзависимостиотхолодопроизводительностикомпрессора, испарителя и конденсатора. Поэтому процесс регулированияопределяетнетолькобалансхолодопроизводительностикомпрес-
сора Qoк и испарителя Qои, но и температурный уровень отвода или подводатеплоты. Следовательно, регулированиепаровойкомпрессорной машины представляет собой комбинированный процесс, сочетающий количественный и качественный способы.
Исполнительным органом системы регулирования (регулятором холодопроизводительности) служит дроссельный вентиль. Рабочий
195

режиммашины, которыйсоответствуетточкепересечения характеристиккомпрессора ииспарителя Qoк = Qои, обеспечивают изменениемпроходногосечениявентиля. Схема согласования характеристик основных элементов машины при некотором постоянном значении температуры окружающейсредыприведена нарис. 3.3. Характеристика испарителя Qoк =f(T0) (T0 — температуракипения хладагента) отвечает изменению теплопритоков охлаждае-
могопомещения, характеристикакомпрессораQок = f(T0) — регулированию его производительности, расходная характеристика дроссельноговентиляQдв= f(T0) устанавливаетстепеньегозакрытияили открытия. Характеристики перечисленных элементов машины при изменении режима ее работы показаны штриховыми линиями. Точка А определяет рабочую точку системы «машина — охлаждаемое помещение» как объекта регулирования при переходе с одного режима работы на другой. При этом точка А′ соответствует рабочему режиму в процессе регулирования компрессора, а точка А′′ — при изменении характеристики испарителя. Регулирование холодопроизводительности машины с поршневым компрессором осуществляют плавным или ступенчатым (позиционным) регулированием его производительности. В машинах малой и средней мощности получили распространение следующие способы плавного регулирования с помощью внешних или встроенных конструктивных устройств:
перепускхладагентасосторонынагнетания навсасывание(байпасирование), который осуществляют регулирующими вентилями, управляемыми от датчика давления или температуры;
дросселирование на всасывании с переводом компрессора на работу при пониженном давлении всасывания;
изменение объема мертвого пространства подключением к нему дополнительного внешнего объема;
изменение частоты вращения вала компрессора.
196
Ступенчатое регулирование в машинах малой и средней холодопроизводительности в основном выполняют способом «пуск-ос- тановка» с предельной частотой циклов до 5-6 в 1 ч; для многоступенчатых компрессоров эффективно используют отключение отдельных цилиндров путем отжатия всасывающих клапанов с помощью механических толкателей. Управление движением толкателей производятгидравлическими, пневматическимиилиэлектромагнитнымиприводами. Внедряетсясистемаэлектронногорегулирования производительностисвоздействиемнавсасывающиеклапаныэлектромагнитного поля.
Примеромступенчатогопропорциональногорегулированияявляется регулирование температуры воздуха в вагоне летом, когда с увеличением теплопритока в вагон увеличивается холодопроизводительность холодильной установки (увеличиваются частоты вращения вала компрессора или включается большее количество его цилиндров). В этом случае импульсом, сигнализирующим необходимостьувеличенияхолодопроизводительности, являетсядальнейшее повышение температуры воздуха в вагоне.
Пример пропорционального плавного регулирования — регулирование температуры воздуха в вагоне зимой, когда с увеличением теплопотерь вагона плавно увеличивается температура воды
вкотле водяного отопления. В этом случае импульсом, сигнализирующим необходимость повышения температуры воды в котле, является изменение температуры наружного воздуха.
Наиболее совершенным, но и наиболее сложным видом пропорционального регулирования является изодромное регулирование, основанное на применении чувствительной и гибкой обратной связи, благодаря которой регулируемый параметр изменяется в очень узкихпределахилидажедержитсянапрактическипостоянномуровне. Первоначально изодромное регулирование применялось для обеспечения постоянной скорости вращения деталей машин, откуда и получило свое название (по-гречески изо — постоянный, равный; дромос — бег, скорость). В настоящее время оно применяется
всамыхразличныхпроцессах, например, дляавтоматическоговождения морских кораблей по заданному курсу.
Вследствие сложности аппаратуры, трудных условий ее работы при вибрации и тряске, а главное из-за отсутствия практической
197
необходимости в предельно точном регулировании температуры воздуха, в установках кондиционирования воздуха вагонов изодромное регулирование не применяется.
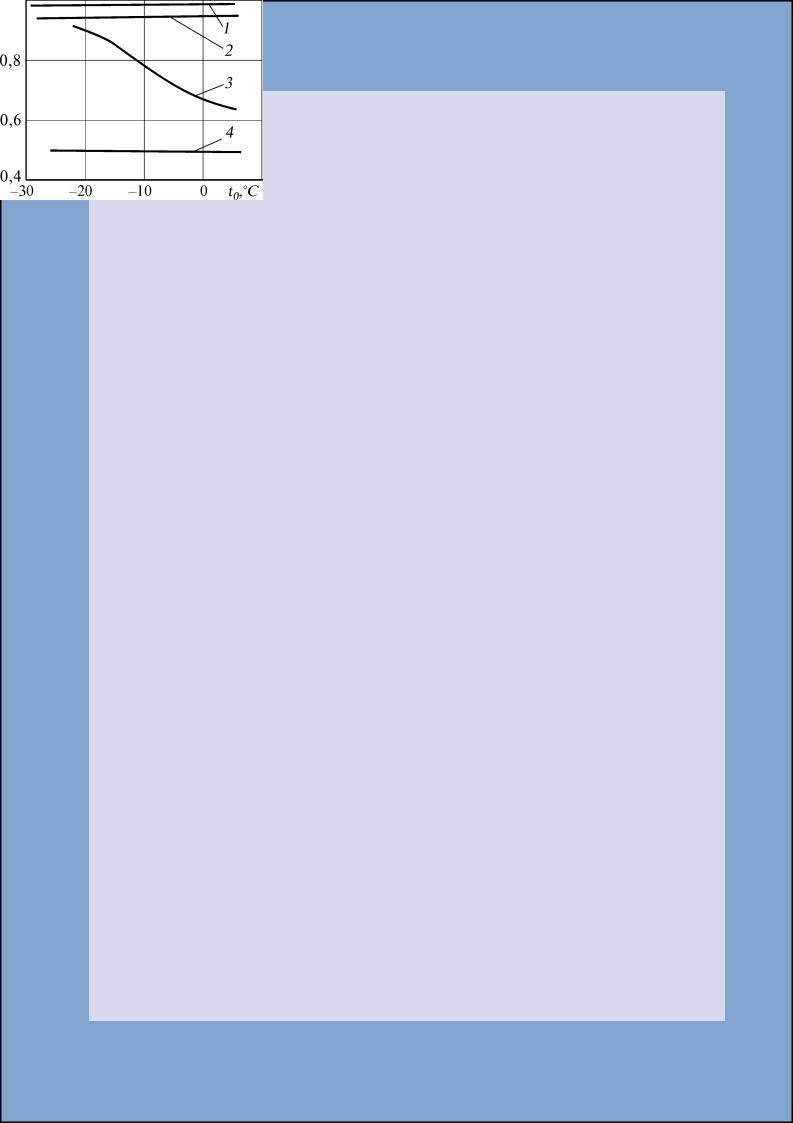
При выборе способа регулирования необходимо учитывать начальныеиэксплуатационныезатраты, технологичностьинадежность конструкции. Дляоценкиэнергетическойэффективностисистемырегулированияиспользуютотношениехолодопроизводительностикомпрессора при заданной степени регулирования к номинальной: χ = qop/qон = f(T0). Показателисравнительнойэффективностиосновных способов регулирования производительности поршневых компрессоровприведенынарис. 3.4. Дляспособовпуск-остановка(линия1) и отжатиевпускныхклапанов(линия2) характернымалыеэнергетическиепотериипрактическаянезависимостьотрежимаработы. Придросселировании на всасывании (линия 3) наблюдается резкое падение эффективности с ростом температуры кипения хладагента, поэтому этот способ применяют в компрессорах, которые работают в узком диапазоне давлений кипения. Байпасирование (линия 4) — наименее эффективный вариант регулирования, так как он связан с потерями энергии сжатого пара при его перепуске, повышением температуры всасывания хладагента, а следовательно, и температуры нагнетания; энергетическиепотериприэтомспособесоответствуютстепениуменьшения холодопроизводительности машины.
В холодильных машинах с винтовыми компрессорами используют
|
следующие способы регулирования |
|
холодопроизводительности: дроссе- |
|
лирование на всасывании, байпаси- |
|
рование, изменение частоты враще- |
|
ниявала, золотниковойсистемой. |
|
Дросселирование обеспечивают |
|
автоматическимперекрытиемдрос- |
|
сельного клапана, установленного |
|
на входе в компрессор. Эффектив- |
|
ностьэтогоспособаограниченасни- |
Рис. 3.4. Энергетическая эффектив- |
жениемпроизводительностидо70% |
от номинальной; при более глубо- |
|
ностьосновныхспособоврегулирова- |
ком дросселировании существенно |
ния производительности поршневых |
|
компрессоров |
снижается экономичность. |
|
198
Байпасирование осуществляют перепуском части хладагента через байпасный клапан со стороны нагнетания на всасывание. Применение такого способа обычно ограничивают компрессорами сухого сжатия.
Наиболее экономичное регулирование путемотключения впроцессе сжатия части объема рабочих полостей обеспечивает золотниковая система. Несмотря на усложнение конструкции компрессора, такая система открывает дополнительные схемные возможности усовершенствования паровых холодильных машин.
Автоматизация работы холодильной машины позволяет с высокой точностью поддерживать требуемый уровень параметров процесса охлаждения, отвечающий оптимальному технологическому режиму, а также частично или полностью исключить участие обслуживающего персонала в эксплуатации холодильного оборудования. В паровых компрессорных машинах объектами автоматизации являются теплообменные аппараты, в частности степень заполнения испарителя жидким хладагентом и давление процесса конденсации.
Объективным и технически наиболее удобным показателем, отражающим степень заполнения испарителя, служит перегрев пара на выходе из него. Действительно, когда часть теплопередающей поверхности испарителя обеспечивает перегрев паров хладагента, уменьшение его подачи приводит к снижению степени заполнения, а следовательно, к росту перегрева. При этом повышение температуры перегрева сверх расчетного уровня ухудшает энергетические показатели машины и надежность ее работы. Подача хладагента в испарительвколичестве, превышающемвозможностипроцессатеплопередачи, связана с переполнением испарителя и снижением перегрева. Последнееприводиткснижениюхолодопроизводительности машины, а в ряде случаев к работе компрессора на влажном паре, что может привести к гидравлическому удару.
Системыавтоматическогорегулированиястепенизаполненияиспарителяпоперегревупаровхладагентавыполняютплавнымиипозиционными (обычно двухступенчатыми). В качестве автоматического регулирования в плавных системах широко используют терморегулирующие вентили (ТРВ), в которых величину перегрева паров хладагента получают в виде разности между температурой пара, выходящего из испарителя, итемпературой кипения хладагента. Терморегулирующие
199
|
вентили,обеспечивающиепроцесс |
|
дросселирования хладагента от |
|
давления конденсации до давле- |
|
нияиспарения, устанавливаютна |
|
линиимеждуконденсаторомиис- |
|
парителем. |
|
Принципиальнаясхемаавто- |
|
матического регулирования |
Рис. 3.5. Схема автоматического ре- |
уровняхладагентависпарителе |
гулированияуровняхладагентавис- |
с помощью ТРВ, используемая |
парителе с помощью ТРВ |
в хладоновых машинах РПС, |
|
приведена на рис. 3.5. Чувстви- |
тельный элемент измерительной головки 1 терморегулирующего вентиля, выполненный в виде мембраны 2 или сильфона, находится под воздействием разности давлений перегретого пара, соответствующего температуре перегрева, и хладагента на выходе из испарителя 7, отвечающего температуре кипения. Перегретый пар, который образуется в термосистеме, состоящей из термобаллона 6 и капилляра 3, поступает в пространство над мембраной; пространство под мембраной связывают уравнительной трубкой 4 с всасывающей линией компрессора 5. При этом уравнительную трубку присоединяют к всасывающей линии в месте установки термобаллона. Внекоторыхконструкцияхвтермобаллонвводяттвердыйпоглотитель и всю термосистему заполняют газом.
Перемещение штока 12 в результате деформации чувствительного элемента при изменении температуры перегрева обеспечивает открытие или закрытие запорного клапана 11, регулирующего поступление жидкого хладагента из конденсатора в испаритель по линии 10. С помощью регулировочного винта 8 изменяют силу затяжки пружины 9 и, следовательно, необходимую величину температуры перегрева.
В процессе автоматического регулирования ТРВ должен обеспечитьоптимальныйуровеньзаполненияиспарителяиустойчивость системы во всем требуемом диапазоне изменения холодопроизводительности, что особенно важно для холодильных машин рефрижераторного подвижного состава. Практически устойчивая работасистемыТРВначинаетсяприперегреве(3 6) К. Длярасширения диапазона регулирования и повышения его устойчивости в системе может быть использовано несколько ТРВ.
200
Процесс автоматического регулирования давления конденсации хладагентавмашинахсконденсаторамивоздушногоохлажденияосуществляютизменениемскоростиилирасходаохлаждающеговоздуха. Технически его обеспечивают системой жалюзи или поворотных заслонок, использованием вентиляторов с изменяемым углом установки направляющихлопаток, применениемдвухскоростныхэлектродвигателей, а также периодическим выключением вентиляторов. Изменение скорости или расхода охлаждающего воздуха приводит к изменению коэффициента теплопередачи конденсатора, а следовательно, к изменению температуры и давления процесса конденсации.
В ряде случаев повышения температуры конденсации добиваются частичным подтоплением поверхности конденсатора жидким хладагентом.
Приборы автоматического регулирования, помимо контроля параметров испарителя и конденсатора, поддерживают заданную температурувоздухавохлаждаемомпомещении, обеспечиваютсвоевременное удаление инея («снеговой шубы») с поверхности испарителя, регулируют уровень масла в маслоотделителях и т.д. Работу системы регулирования сочетают с автоматической защитой, которая включает комплекс мер по безопасной эксплуатации холодильных машин и предупреждает аварийные режимы путем отключения машины.
Система автоматической защиты включает соответствующие датчики (реле защиты и устройства для преобразования импульсов от этих реле в сигнал остановки). В ряде случаев систему защиты дополняют блокировкой, которая исключает повторный пуск машины без устранения причины, вызвавшей срабатывание защиты. В компрессорных холодильных машинах датчики системы защиты следят за уровнем максимального давления и температуры хладагента на нагнетании компрессора, минимального давления на всасывании, за давлением и температурой масла в системе смазки, за работой электродвигателя, исключающей его перегрузку или короткое замыкание. В систему, автоматической защиты может быть введена световая или звуковая сигнализация, оповещающая о достижениипредельногозначенияконтролируемойвеличиныилиприближения к опасному режиму работы машины.
201