

Bystrov_Grigorye_Pershin_-_Sintez_raspredelennykh_regulyatorov
.pdfКомплексный коэффициент передачи по η −ой (η =1,∞) составляющей входного воздействия может быть определен из следующего соотношения:
|
~ |
|
|
J0 |
|
* |
|
|
|
|
Tη x, R, jωτ |
|
γη R |
|
|
||||
Wη (jω)= |
|
|
|
|
|
|
, |
(1.29) |
|
qη sin(ψη x)exp(jωτ) |
= |
J0 (γηR) |
|||||||
(η =1,∞).
Примечание: непосредственно из (1.29) следует, что комплексный передаточный коэффициент по каждой составляющей моде входного воздействия не зависит от пространственных координат.
1.1.5 Понятие пространственно-инвариантных объектов
Положим, что имеется распределенный объект, математическая модель которого описывается уравнениями (1.1). Пусть входное воздействие представимо в виде ряда (1.16).
Объект автоматического управления, представленный в форме (1.1), называется пространственно-инвариантным, если комплексный передаточный коэффициент по каждой составляющей входного воздействия не зависит от пространственных координат.
Математически это определение означает:
Wμ,i,η,γ ,ξ (x, y, jω)=Wμ,i,η,γ ,ξ (jω),
(μ =1,m; i =1,n; η,γ =1,∞; ξ =1,4).
Интерпретация введенного определения на языке структурных схем заключается в следующем: объект управления, удовлетворяющий определению, может быть представлен совокупностью независимых блоков с комплексными передаточными коэффициентами Wμ,i,η,γ ,ξ (jω),
(μ =1,m; i =1,n; η,γ =1,∞; ξ =1,4).
На физическом уровне определение означает, что составляющая входного воздействия, проходя через объект управления, изменяет только амплитуду пространственной моды.
На математическом уровне – собственные функции оператора объекта могут быть представлены в виде комбинации sin() и cos() (функциями
Bμ,η,γ ,ξ (x, y)).
Выделим свойства, которым должны обладать передаточные функции, полученные на основе функций Грина (см. п.1.2.2), чтобы объект относился к классу пространственно-инвариантных. Положим, что
20
входное воздействие на объект управления представлено в виде ряда (1.16). Тогда реакция объекта на каждую пространственную моду может быть записана в виде:
Qη,γ ,ξ (x, y, jω)= ∫∫W (x, y, x1, y1, jω) Cη,γ ,ξ (jω) Bη,γ ,ξ (x1, y1)dx1dy1 , (1.30)
D1
где x1, y1 D1 - область распределения входных воздействий. |
|
|
||||||
(Для простоты рассматриваем скалярное входное воздействие |
μ =1.) |
|||||||
Комплексный |
передаточный |
коэффициент |
по |
|
каждой |
|||
пространственной моде будет равен: |
|
|
|
|
||||
W |
(x, y, jω)= |
Qη,γ ,ξ (x, y, jω) |
Cη,γ ,ξ (jω) Bη,γ ,ξ |
(x, y) |
|
|
||
η,γ ,ξ |
|
|
|
|
y1 → y). |
|||
При этом наложим области функций входа и выхода (x1 → x, |
||||||||
Положим, что |
|
|
|
|
|
|
|
|
|
Qη,γ ,ξ (x, y, jω)= |
Q1,η,γ ,ξ (jω) Bη,γ ,ξ (x, y), |
(1.31) |
|||||
тогда Wη,γ ,ξ (x, y, |
jω)=Wη,γ ,ξ (jω), т.е. |
объект принадлежит |
к |
классу |
||||
пространственно-инвариантных. |
|
|
|
|
||||
Условие (1.31) выполняется если |
|
|
|
|
||||
|
|
~ |
|
, y1 ), |
|
|
||
W (x, y, x1, y1, jω)= ∑W η,γ ,ξ (jω) Wη,γ ,ξ (x, y, x1 |
|
|
||||||
|
|
|
η,γ ,ξ |
|
|
|
|
|
где Wη,γ ,ξ (x, y, x1, y1) - представляется в виде произведения ортогональных
функций, аналогичных (1.17). Полученные условия пространственной инвариантности распределенного объекта могут быть перенесены и на функции Грина.
Пример.
Определим комплексный передаточный коэффициент по пространственным модам для объекта, передаточная функция которого приведена в примере п.1.2.2.
Положим, |
что входное воздействие распределено по области |
||||
|
|
D1 , |
|
|
|
ρ,ν,ϑ =ϑ |
а функция выхода x, y, z = z D2 . Где ϑ , z - фиксированные |
||||
значения координат ϑ, z . Тогда передаточная функция может быть записана в виде:
21

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
() |
|
∞ |
(z ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
∑ Bk,m |
∑ |
B |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
||||||||||||
|
|
W (x, y, z, ρ,ν,ϑ , s)= |
|
|
|
|
k,m |
|
|
|
|
|
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
l |
l |
2 |
l |
3 |
|
|
|
|
|
|
|
2 |
|
2 |
|
|
2 |
|
|
m |
2 |
|
n |
2 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
+ a |
π |
|
k |
|
+ |
|
+ |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
2 |
l 2 |
l 2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
3 |
|
||||
где |
|
|
= |
sin |
k π x |
|
sin |
|
|
m |
π y |
|
sin |
|
k π ρ |
|
sin |
m π ν |
, |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
Bk,m () |
|
|
l |
|
|
|
|
l |
|
|
|
|
|
|
|
l1 |
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
n π z |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
n (z )= sin |
sin |
n π ϑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
l3 |
|
|
|
|
|
|
|
|
|
l3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Qη,γ ,ξ (x, y, jω)= ∫ ∫W (x, y, z, ρ,ν,ϑ |
, jω) Cη,γ ,ξ (jω) Bη,γ ,ξ (ρ,ν )dρdν |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
D1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Учитывая ортогональность подинтегральных функций, получим:
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Bη,γ () ∑ |
|
n (z) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
(x, y, z, jω)= |
|
8 |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Qη,γ ,ξ =1 |
|
|
|
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
l1 |
l2 |
|
|
|
|
|
2 |
|
2 |
|
|
η |
2 |
|
γ |
2 |
|
n |
2 |
|
|||||
|
|
|
|
l3 |
|
|
|
jω + a |
π |
|
|
|
+ |
|
+ |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
2 |
l 2 |
l 2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
3 |
|
||
Комплексный |
передаточный |
|
|
коэффициент |
|
|
|
по |
||||||||||||
пространственной моде равен (ρ → x,ν → y) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Wη,γ |
,ξ =1(x, y, jω)= |
|
|
|
Qη,γ ,ξ =1(x, y, z, jω) |
|
|
|
= |
||||||||||
|
|
Cη,γ ,ξ =1(jω) Bη,γ ,ξ =1(x, y) |
||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
∑ |
|
n (z ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
8 |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
2 |
|
|
|
|
||||
|
l1 l2 l3 |
|
|
|
|
|
2 |
|
2 |
η |
γ |
n |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
jω |
+ a |
|
π |
|
|
|
2 + |
|
2 + |
|
|
Cη,γ ,ξ |
||||
|
|
|
|
|
|
|
|
2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
l1 |
l2 |
l3 |
|
|
|
|
||||
каждой
.
=1(jω)
(1.32)
Как следует из (1.32) Wη,γ ,ξ =1(x, y, jω)=Wη,γ ,ξ =1(jω), т.е. объект принадлежит к классу пространственно-инвариантных.
1.1.6 Пространственно – инвариантные системы
Рассмотрим систему автоматического управления, составленную из объекта и регулятора.
Математическая модель объекта имеет вид:
∂Τ |
|
|
∂Τ |
|
∂n1 |
Τ |
∂Τ |
∂n2 Τ |
∂Τ |
∂n3 Τ |
|
|
i |
= L |
(Τ ; |
i ;... |
|
i |
; |
i ;... |
i ; |
i ;... |
i ), |
(1.33) |
|
|
|
|||||||||||
∂τ |
i |
i |
∂x |
|
∂xn1 |
∂y |
∂yn2 |
∂z |
∂zn3 |
|
||
|
|
__ |
|
|
|
|
|
|
|
|
|
|
x, y, z V , |
(i=1,n), |
|
|
|
|
|
||||||
22

n |
|
θχ (x, y,τ) =∑aiΤi (x, y, zχ ,τ), |
(1.34) |
i=1
(χ =1,m),
где θχ(x,y,τ) - регулируемые переменные (χ =1, m) ; ai - заданные коэффициенты (i =1,n).
(Для простоты полагаем, что ai (i =1,n) принимают значения либо
n
0,либо 1, причем ∑ai =1.)
i=1
Граничные условия для системы уравнений (1.34) описываются соотношениями:
L2,i [Τi (χ, y, z,τ), |
Τi+1(χ, y,τ)=0,] |
(1.35) |
||||||
x, y, z Г1,i |
|
|
|
(i = |
|
|
|
|
|
|
|
1, n −1), |
|||||
~ |
|
|
|
|
|
(1.36) |
||
Li,τ =[Τi (x,y,z,τ)]=0, |
~ |
|||||||
x, y, z Г2,i |
|
|
|
~ |
|
|||
(i =1, n; |
|
|||||||
|
j |
=1, n ), |
||||||
~ |
αμ(x, y,τ)]=0, |
(1.37) |
||||||
Li,μ [Τi (x, y, zμ ,τ); |
||||||||
x, y Г3,μ′ |
|
|
|
(μ = |
|
|
||
|
|
|
1, m ), |
|||||
Математическая модель регулятора:
Lp ,μ (Fp ,μ ; |
∂Fp |
,μ |
;... |
∂h1 |
Fp ,μ |
; |
∂Fp ,μ |
;... |
|
∂h2 Fp ,μ |
; |
|||||||
∂τ |
|
|
|
h |
|
∂x |
|
h |
|
|||||||||
|
|
|
|
|
|
∂τ 1 |
|
|
|
|
|
∂x |
2 |
|
||||
∂Fp ,μ |
|
∂h3 Fp ,μ |
|
|
|
∂U μ |
|
|
|
~ |
|
|
|
|
|
|||
;... |
|
;U μ ; |
|
;... |
∂h1U μ |
; |
|
(1.38) |
||||||||||
|
|
|
|
|
|
|
|
|
~ |
|
||||||||
∂y |
|
h |
|
|
|
∂τ |
|
|
|
|||||||||
|
|
∂y 3 |
|
|
|
|
|
|
|
∂τ h1 |
|
|
|
|
||||
∂U μ |
|
~ |
|
;... |
∂h2U μ |
||
|
~ |
||
∂x |
|||
|
∂x h2 |
~
; ∂∂Uyμ ;... ∂h3U μ ) = 0,
23
x, y Гp,μ′ |
(μ = |
|
|
1, m), |
Граничные условия для системы уравнений (1.38):
~ |
|
Lpμ (Fp,μ;Uμ ) = 0 , x , y Г~ p , μ |
(1.39) |
( μ = 1, m; ~ 1, m ),
μ =
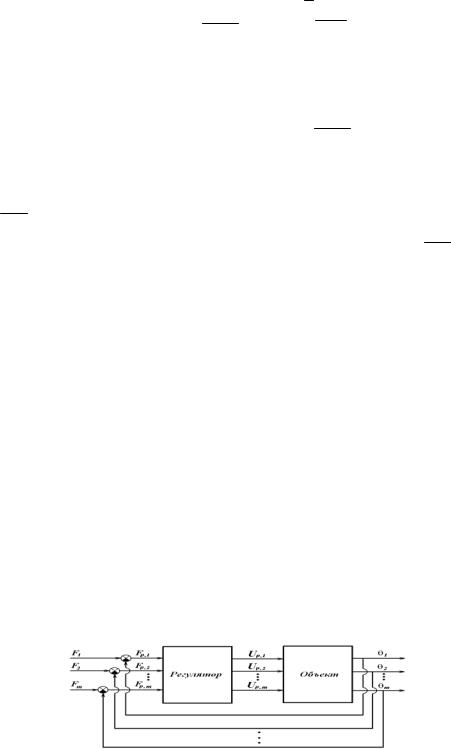
Уравнения связей, обеспечивающих замыкание системы (см. рис. 1.5), имеют вид:
U p,μ (x, y,τ ) = αμ (x, y,τ ),(μ =1, m)
Fp,μ (x, y,τ ) = Fμ (x, y,τ ) −θμ (x, y,τ ),
Где
(μ = 1, m) - задающие воздействия.
Полагая, что задающие воздействия Fμ (x, y,τ ), в ряды Фурье, представим их в виде:
(1.40)
(1.41)
Fμ (x, y,τ ),
(μ = 1, m) разложимы
|
|
|
|
|
|
|
∞ |
4 |
~ |
~ |
(x, y), |
|
||||
Fμ (x, y,τ) = ∑∑Cμ,η,γ ,ξ (τ) * Bμ,η,γ ,ξ |
(1.42) |
|||||||||||||||
|
|
|
|
|
|
η,γ =1ξ=1 |
|
|
|
|
|
|||||
|
|
|
|
(μ = |
|
|
), |
|
|
|
||||||
|
|
|
|
1,m |
|
|
|
|||||||||
где |
|
|
|
|
|
|
xF ,μ −yF ,μ |
|
|
|
||||||
~ |
|
|
|
1 |
|
|
~ |
|
|
|||||||
|
|
|
|
|
|
∫ |
∫ |
|
|
|
||||||
Cμ,η,γ,ξ (τ) = |
|
|
|
|
|
|
|
Fμ (x, y,τ) * Bμ,η,y,ξ (x, y)dxdy, |
(1.43) |
|||||||
x |
F,μ |
y |
|
|
|
|||||||||||
|
|
|
|
|
F,μ −F ,μ −yF ,μ |
|
|
|
||||||||
μ = |
|
;η,γ = |
|
,ξ = |
|
|
|
|
|
|||||||
1, m |
1,∞ |
1,4); |
|
|
|
|||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
||
|
Bμ,η,γ ,1(χ, y) = cos(ψF,η,μ * x)*cos(ϕF,μ,γ * y); |
|||||||||||||||
~ |
|
(χ, y) |
|
|
|
|
~ |
|
|
|||||||
|
Bμ,η,γ ,2 |
=sin(ψF,η,μ * x)*cos(ϕF,μ,γ * y);; |
||||||||||||||
Рисунок 1.5. Система управления.
24
~
Bμ,η,γ ,3 (x, y)
~
Bμ,η,γ ,4 (x, y)
~ |
|
= cos(ψF,η,μ * x)*sin(ϕF,μ,γ * y); |
(1.44) |
~ |
|
=sin(ψF ,η,μ * x)*sin(ϕF,μ,γ * y) |
|
|
(μ = |
|
|
|
η,γ = |
|
|
|
|
|
|
1,m; |
|
|
|||||||
|
1,∞); |
|
|
|||||||
ψ F , μ ,η |
= |
π *η |
; |
ϕ~F , μγ = |
π * γ |
; |
||||
|
|
|
||||||||
|
|
xF , μ |
|
|
|
γ F , μ |
||||
(μ =1, m; η,γ =1,∞);
xF,μ; yF,μ;(μ =1,m) - заданные числа.
Для частотного анализа системы положим в (1.42)
~ |
|
~ |
|
|
jωτ |
, |
|
|
||
Cμ,η,γ ,ξ |
(τ) = qμ,η,γ ,ξ *e |
|
|
(1.45) |
||||||
|
|
|
|
|
|
|
|
|
||
(μ =1, m;η,γ =1,∞;ξ =1,4), |
||||||||||
|
||||||||||
где |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
qμ,η,γ,ξ (μ =1,m;η,γ =1,∞;ξ =1,4) - фиксированные значения. |
|||||||||||||
Пусть реакция системы по |
χ − ой регулируемой переменной |
||||||||||||
(χ = |
|
) на η , γ , ξ |
|
|
|
|
|
|
|
||||
1,m |
( μ = |
|
;η , γ = |
|
; ξ = |
|
) пространственную |
||||||
1, m |
1, ∞ |
1,4 |
|||||||||||
|
|
μ−го (μ = |
|
|
|
||||||||
моду |
|
1, m) |
входного воздействия определена: |
||||||||||
|
|
|
|
|
|
θ |
|
|
(x, y, jω)*ejωτ. |
||||
|
|
|
|
|
|
χ,μ,η,γ,ξ |
|
|
|
|
|
||
Комплексный передаточный коэффициент системы для χ − ой (χ =1,m)
регулируемой переменной |
по |
η , γ , ξ -ой |
(η,γ = |
1,∞ |
;ξ = |
1,4 |
) |
|||||
пространственной моде μ−го |
(μ = |
|
|
|
|
|
||||||
1, m) |
входного |
воздействия имеет |
||||||||||
вид: |
θ |
(x, y, jω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Φμ,χ,η,γ,ξ (x, y, jω) = |
|
μ,χ,η,γ,ξ |
|
|
, |
|
(1.46) |
|
|
|
|
|
~ |
~ |
|
|
|
|
|
|
|
|
|||
|
qμ,χ,η,γ,ξ *Bμ,χ,η,γ,ξ (x, y) |
|
|
|
|
|
|
|||||
(χ, μ =1,m;η, y =1,∞;ξ =1,4)
25

Система управления, представленная в форме (1.33) – (1.41), является пространственно – инвариантной, если комплексный передаточный коэффициент
Φμ,χ,η,γ ,ξ (x, y, jω) = Φμ,χ,η,γ,ξ ( jω) , |
(1.47) |
(χ, μ =1,m;η, y =1,∞;ξ =1,4)
Пространственно-инвариантная система обладает таким же свойством как и пространственно-инвариантный объект.
Введем понятие пространственной совместимости.
Определение: система обладает свойством пространственной совместимости, если соответствующие пространственные моды разложения входных сигналов регулятора и объекта совпадают.
Математически это определение означает:
=~ =~ =
Bμ,η,γ,ξ(x,y) Bμ,η,γ,ξ(x,y) Bμ,η,γ,ξ(x,y) Bη,γ,ξ(x,y), (1.48)
(χ, μ =1,m;η, y =1,∞;ξ =1,4)
Физический смысл определения состоит в том, что области распределения входных воздействий регулятора и объекта при наложении совпадают. При этом состояние входных воздействий на границах рассмотренных областей описывается одинаковыми условиями.
Утверждение . Для того, чтобы система автоматического управления была пространственно-инвариантной, достаточно, чтобы объект и регулятор были пространственно-инвариантными и система обладала свойством пространственной совместимости.
Доказательство.
Пусть для системы управления описываемой уравнениями (1.33) – (1.41), выполняются условия:
а) объект пространственно-инвариантный, т.е.
Wμ,i,η,γ ,ξ (x, y, jω) =Wμ,i,η,γ ,ξ ( jω), |
(1.49) |
|||||||
( χ , μ = |
|
;η , y = |
|
; ξ = |
|
) |
|
|
1, m |
1, ∞ |
1,4 |
|
|||||
б) регулятор пространственно-инвариантный: |
|
|||||||
Rμ,η,γ ,ξ (x, y, jω) = Rμ,η,γ ,ξ ( jω), |
(1.50) |
|||||||
( χ , μ = |
|
;η , y = |
|
; ξ = |
|
) |
|
|
1, m |
1, ∞ |
1,4 |
|
|||||
26

в) система обладает свойством пространственной совместимости:
~ |
~ |
(1.51) |
Bμ,η,γ,ξ (x, y) =Bμ,η,γ,ξ (x, y) =Bμ,η,γ,ξ (x, y) =Bη,γ,ξ (x, y), |
||
( χ , μ = 1, m ;η , y = 1, ∞; ξ = 1,4)
Разомкнем систему на входе регулятора. Подадим на вход регулятора воздействие
|
|
~ |
jωτ |
*Bη, y,ξ (x, y), |
|
(1.52) |
|||||||
Fp,m (x, y, jω) =qμ *e |
|
|
|||||||||||
где qμ |
(μ =1,m;) - заданные числа; |
|
|
||||||||||
η , γ , ξ |
- фиксированные целые числа; |
|
|
||||||||||
Согласно (1.50), |
функции U |
|
|
|
|
(μ = |
|
) могут быть найдены |
|||||
μ,η,γ |
,ξ |
1,m |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||
из выражения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
μ |
(x, y, jω) = R |
|
( jω)*q |
μ |
*e jωτ *B |
(x, y), (1.53) |
||||||
|
|
μ,η,γ,ξ |
|
|
|
|
η,γ,ξ |
|
|
||||
(μ =1,m).
Функции Uμ (x, y, jω) и αμ (x, y, jω) связаны соотношением (1.40)
(μ =1,m).
Функции регулируемых переменных θχ (χ, y, jω), согласно (1.34), с учетом (1.49), могут быть определены следующим образом:
θ (x, y, jω) = ∑ W |
|
( jω)* R |
|
( jω)* F (x, y, jω), (1,54) |
|
|
m |
μ, χ,η,γ ,ξ |
|
|
|
χ |
μ=1 |
|
μ,η,γ ,ξ |
p,μ |
|
|
|
|
|
|
|
(μ =1,m).
Рассмотрим замкнутую систему автоматического управления (см. рис. 1.5). Подадим на вход системы задающее воздействие
|
~ |
*e |
jωτ |
*Bη,γ,ξ |
(x, y), |
(1.55) |
||||
|
|
Fμ =qμ |
|
|||||||
|
|
|
|
|
|
(μ = |
|
). |
|
|
~ |
|
|
|
|
|
1,m |
|
|||
(μ =1,m) - заданные числа. |
|
|
|
|||||||
где qμ |
|
|
|
|||||||
|
|
|
|
|
|
27 |
|
|
|
|

Согласно (1.41), входное воздействие в регулятор:
|
|
~ |
*e |
jωτ |
* Bη,γ ,ξ (x, y)*θμ (x, y, jω), |
||
Fp,μ (x, y, jω) = qμ |
|
||||||
|
|
|
|
(μ = |
|
). |
|
|
|
|
|
1,m |
|||
Подставляя (1.56) в (1.54) с учетом (1.41), получим: |
|||||||
θμ (x, y, jω) = |
|
m |
|
|
|
|
|
|
∑ Wμ,χ,η,γ,ξ ( jω)*Rμ,η,γ,ξ ( jω)* |
||||||
~ |
μ=1 |
|
|
|
|
|
|
|
jωτ |
*Bη,γ,ξ (x, y)*θμ (x, y, jω), |
|||||
qμ *e |
|
||||||
(μ =1,m).
Представим систему уравнений (1.57) в матричной форме:
(1.56)
(1.57)
θ |
χ |
(x, y, jω) =(R |
|
( jω)*W |
( jω))T * F(x, y, jω) −θ(x, y, jω)), |
||||||||||||||||||||||
|
|
η,γ,ξ |
|
|
|
η,γ,ξ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.58) |
|||||||
|
Rη,γ,ξ ( jω) =diag |
|
Rμ,η,γ,ξ |
|
|
|
, |
|
(μ = |
|
|
|
|
); |
|||||||||||||
где |
|
|
|
|
1,m |
||||||||||||||||||||||
|
|
|
Wη,γ,ξ ( jω) = |
|
|
|
|
|
|
|
|
|
, (μ = |
|
|
); |
|||||||||||
|
|
|
|
Wμ,χ,η,γ,ξ ( jω) |
|
|
|
||||||||||||||||||||
|
|
|
|
|
1,m |
||||||||||||||||||||||
|
|
|
F(x, y, jω) = |
|
Fμ (x, y, jω) |
|
|
, |
(μ = |
|
|
); |
|||||||||||||||
|
|
|
|
|
|
1,m |
|||||||||||||||||||||
|
|
|
θ(x, y, jω) = |
|
θμ (x, y, jω) |
|
, |
(μ = |
|
). |
|||||||||||||||||
|
|
|
|
|
1,m |
||||||||||||||||||||||
Решая уравнение (1.58) , найдем функцию θ(x, y, jω):
θ(x, y, jω) =Φη,γ,ξ ( jω)*F(x, y, jω),
|
Φ |
|
( jω) = E +(R |
( jω)*W |
T −1 |
* |
||
где |
|
( jω) |
|
|||||
|
η,γ ,ξ |
[ |
η,γ ,ξ |
η,γ ,ξ |
|
] |
|
|
|
|
|
|
|||||
*Rη,γ ,ξ ( jω)*Wη,γ ,ξ ( jω T ;
Е– единичная матрица (m x m).
28
Так как Φη,γ,ξ ( jω) не зависти от пространственных координат, то
система управления пространственно-инвариантна, и таким образом, утверждение доказано.
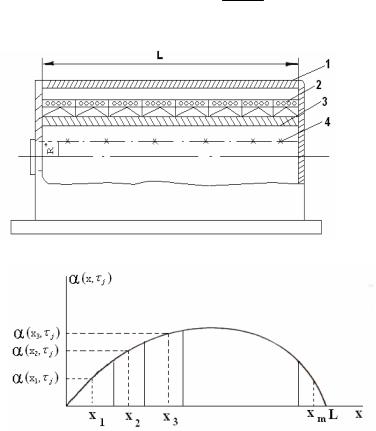
1.1.7 Экспериментальное определение частотных характеристик нагревательной камеры
Рассмотрим определение частотных характеристик коаксиальной нагревательной камеры. Конструктивно нагревательная камера (см. рис.1.6) оформляется в виде коаксиально расположенных: охлаждаемого корпуса (1); секционного нагревателя (2) (число секций m); трубы (3); датчиков изменения температурного поля (4), которые находятся внутри камеры на радиусе R* (число датчиков n).
Длина камеры равна L. Оба конца камеры имеют постоянную температуру, равную нулю.
Управляющим воздействием (α(x,τ)) служит тепловой поток
секционного нагревателя.
Для частотного анализа объекта приложим управляющее воздействие в виде:
α ( x,τ ) = q * sin( ω *τ ) * sin( π L*η * x ), (1.59)
где q,ω,η- фиксированные числа.
Рисунок 1.6. Нагревательная камера
Рисунок 1.7. График управляющего воздействия
29