W (1) |
(G , |
|
|
|
) = A(1) |
(G |
) eα1(Gη) |
z |
1 + B(1) e−α1(Gη)z1 |
|
z |
1, jω |
|
2 |
η |
|
|
η |
|
|
|
|
|
При |
этом |
значения |
коэффициентов |
A(i) (G ) и |
B(i) (G ) |
|
|
|
|
|
|
|
|
|
|
η |
η |
определяются |
|
с |
|
использованием (3.36), |
где CT = [1,0,0,0,0,0,]. |
Матрица комплексных передаточных коэффициентов объекта может быть записана в виде
Ф( jω) = Ф11( jω) Ф12 ( jω) ,
Ф21( jω) Ф22 ( jω)
где фiξ = diag(Wξ (i) (Gη , zi , jω)) , (η =1, ∞) - матрица комплексных передаточных коэффициентов объекта, связывающая ξ -й вход с i-ым выходом (i=l,2; ξ=1,2).
3.2.2.2 Синтез регулятора
Процедура синтеза регуляторов использует годографы собственных значений матрицы Ф( jω) .
Фазовый сдвиг, вносимый в разомкнутую систему регулятором (РВР) для частот, лежащих на линии перегиба (см. п.
3.3.) ω(ξ) =ωη(ξ) ; |
(η =1,2...) , равен нулю. Определение |
параметров |
регуляторов Ei (ξ) , |
ni (ξ) , (Ei (ξ) ≥ 0); |
(ni (ξ) ≥1); (i =1,2,4; ξ =1,2) |
будем осуществлять, исходя из условия |
равенства частот ω(ξ) |
и частот |
среза модуля разомкнутой системы. При этом выбор значений параметров (ξ) (ξ =1,2) осуществляется с учетом радиусов спектров Гершгорина матрицы Ф( jω) .
Значения частот среза модуля разомкнутой системы будем определять из следующего соотношения:
−π + ϕ(ξ) = arctg(Im(Wξ(ξ) (Gη , z ξ , jω)) / Re(Wξ(ξ) (Gη , z ξ , jω)))
Положим ϕ(ξ) = 0,8 и вычислим значения
Gη , ωη(ξ) =ω

G = (π / x |
L |
)2 + (π / y |
L |
)2 , |
|
|
|
|
|
|
G |
2 |
|
= (π 5 / x |
L |
)2 |
+ (π 4 / y |
L |
)2 |
, |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G = 6,096 , |
|
|
ω |
(1) |
= 0,00890 , |
|
|
|
|
ω |
(2) = 0,0093, |
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
G2 =113,0, |
|
|
ω2(1) = 0,00892, |
|
|
|
|
ω2(2) = 0,00935 , |
|
|
|
|
Подставляя |
|
значения |
ωη(ξ) в |
соотношение |
|
|
|
|
|
|
|
M |
(ξ)(G ) |
|
(ξ) (G , |
|
ξ , jω) |
|
, получим: |
|
|
|
|
|
|
|
|
|
= |
W |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
ξ |
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
(1) (G ) = |
0,00303, |
|
|
|
M (1) (G |
2 |
) = 0,00282 , |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
(2) (G ) |
= 0,00393, |
|
|
|
|
M (2) (G |
2 |
) = 0,00356 . |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как ω1(ξ) и ω2(ξ) является |
|
|
|
частотами |
|
среза |
модуля |
разомкнутой системы, то коэффициенты усиления регуляторов равны |
|
|
|
|
1(1) = (M (1) (G1))−1 , |
|
|
|
|
|
2(1) |
= (M (1) (G2 ))−1 |
|
|
|
|
|
|
M |
|
M |
|
|
|
|
|
|
|
1(2) = (M (2) (G1))−1, |
|
|
|
2(2) = (M (2) (G2 ))−1 |
|
|
|
|
|
|
M |
|
M |
|
|
|
|
|
Приравнивая M min(ξ) η = M η(ξ) , (η,γ =1,2) (см. п.3.3.) и рассматривая совместно полученные соотношения, определим значения n1(ξ) и Е1(ξ) :
n(1) =1432 , |
|
n(2) |
=1020,0 , |
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
E (1) |
= 328,4 , |
|
E (2) |
= 252,6. |
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Представим |
совокупность |
|
|
|
радиусов |
спектров Гершгорина |
матрицы |
Ф( jω) |
для |
G , |
|
ω |
η |
(ξ) |
(η =1,2...; |
ξ =1,2) в |
виде двух |
|
|
|
η |
|
|
|
|
|
|
|
|
|
последовательностей r (1) , |
r (1) |
, |
… |
r (2) , |
r (2) |
, |
…. |
|
|
|
1 |
2 |
|
|
|
|
|
1 |
2 |
|
|
|
Выбор |
значения ξ |
будет |
|
осуществлять, |
исходя |
из следующего |
условия: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(ξ) ≥ 3 (lg(M (ξ) (G ) + r |
(ξ) |
) − lg(M (ξ) (G ) − r (ξ) |
)); |
|
|
|
1 |
|
|
max |
|
|
1 |
max |
|
|
|
M (ξ) ≥ r |
(ξ) |
|
, |
(ξ =1,2) , |
|
|
|
|
|
|
|
max |
|
|
|
|
|
|
|

|
где r (ξ) |
- |
максимальное значение элементов последовательностей |
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
(ξ) , r (ξ) , … |
(ξ =1,2) |
(соотношение, |
определяющее |
взаимосвязь |
1 |
2 |
|
|
|
(ξ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параметров |
|
|
и |
(ξ) , приведено в п. 3.3). |
|
|
r |
(ξ) были выбраны |
|
|
|
|
С использованием соответствующих расчетов |
|
|
(1) |
|
|
|
|
(2) = 0,35. |
|
|
|
|
|
|
|
max |
|
значения: |
|
= 0,35, |
|
|
|
|
|
|
|
|
|
|
|
|
Для определения параметров Ei (ξ) , ni(ξ) , |
(i = 2,4) - |
рассмотрим |
уравнения (3.30) для G1 и G2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
lgωη(ξ) = 0,5 [lg K4(ξ) (Gη ) − lg K2(ξ) (Gη )], , |
|
|
|
(3.37) |
|
(η =1,2...; |
|
ξ =1,2) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для разности |
lg |
ω(ξ) = lgω2(ξ) |
− lgω1(ξ) получим соотношение |
|
|
|
|
|
|
|
|
(ξ) |
|
|
|
|
(ξ) |
−1 |
|
|
|
|
|
lg ω(ξ) = |
|
|
n |
4 |
−1 + G2 |
n |
2 |
|
+ G2 |
|
|
0,5 lg |
|
|
|
|
− lg |
|
|
|
|
|
; |
(3.38) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n(ξ) |
−1 + G |
|
|
n(ξ) −1 |
+ G |
|
|
|
|
|
|
|
|
|
|
|
4 |
1 |
|
|
|
2 |
|
|
|
1 |
|
|
|
(ξ =1,2) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω (ξ) |
=ω2(ξ) |
ω1(ξ) |
|
|
|
|
|
|
(3.39) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя вычисление значения ωη(ξ) в выражение (3.39), получим |
|
ω (ξ) >1. Воспользовавшись уравнением (3.38.), |
выберем n2(ξ) = ∞. |
Рассматривая |
|
совместно уравнения (3.37) |
и уравнения, |
связывающие |
параметры регулятора с |
(1) |
и (2) (см. п. 3.3), получим: |
|
|
E4(1) |
= 0,0098 , |
n4(1) =1491, |
|
|
E2(1) |
= 30,27, |
|
|
|
E4(2) = 0,0081, |
n4(2) = 965,8 , |
|
|
E2(2) = 36,62. |
|
|
3.2.2.3 Определение запасов устойчивости по модулю и по фазе разомкнутой системы
Запишем комплексный передаточный коэффициент регуляторов в
виде матрицы
R |
(1) |
0 |
|
|
|
1 |
R2(1) |
|
0 |
|
|
|
|
|
|
|
|
0 |
|
O |
|
|
R( jω) = |
|
|
|
R (2) |
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
R2(2) |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
O |
где R(ξ) (G |
|
, jω) - |
комплексный |
передаточный коэффициент ξ - |
η |
η |
|
|
|
|
го регулятора (см. п. 3.3).
Матрица комплексных передаточных коэффициентов разомкнутой системы имеет вид
Фр( jω) =Ф( jω) R( jω) .
|
Запасы устойчивости по модулю Lη(ξ) |
и фазе |
ϕη(ξ) определяются с |
использованием годографов собственных значений |
матрицы |
Фр( jω) . |
Полученные |
запасы устойчивости для различных значений Gη равны: |
|
G1 = 6,09, |
L(1) |
= 8,7, |
ϕ(1) |
= 0,80, |
L(2) =10,9, |
ϕ(2) = 0,80 |
G2 |
= 41,2, |
L(1) |
= 8,7, |
ϕ(1) |
= 0,805, |
L(2) |
=10,5, |
ϕ(2) |
= 0,80 |
G3 |
= 71,8, |
L(1) |
= 8,6, |
ϕ(1) |
= 0,804, |
L(2) |
=10,5, |
ϕ(2) |
= 0,83 |
G4 |
=113, |
L(1) |
= 8,7, |
ϕ(1) |
= 0,81, |
L(2) =10,6, |
ϕ(2) = 0,84 |
3.2.2.4 Анализ работы замкнутой системы управления
Подавая |
на |
|
вход |
|
синтезированных |
|
регуляторов |
F (ξ) (x, y, s) , (ξ =1,2) |
|
на выходе будем иметь |
|
|
|
|
Uξ = D(ξ) |
+ |
D4(ξ) |
+ D |
(ξ) S , |
|
(ξ =1,2) |
|
|
|
|
|
|
|
|
1 |
|
|
|
S |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dμ(ξ) = Eμ(ξ) |
|
nμ |
(ξ) |
− |
1 |
F (ξ) − |
1 |
∂ |
2 F (ξ) |
|
∂2 F (ξ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
(ξ) |
|
|
|
(ξ) |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
∂y |
|
|
|
|
nμ |
|
|
|
|
nμ |
|
|
|
|
(μ =1,2,4) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F(ξ) (x, y, s) = Fξ (x, y, s) − Hξ (x, y, s).
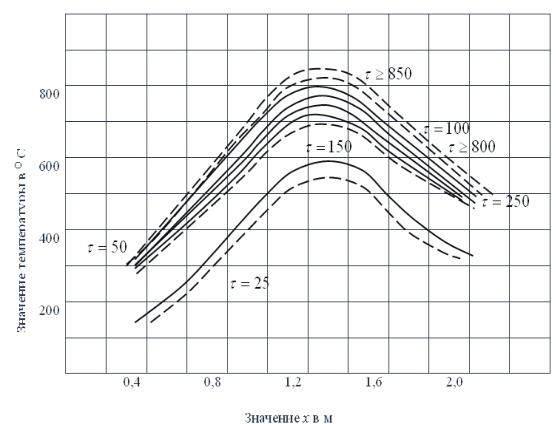
Сиспользованием дискретных аналогов соотношений (3.40), (3.32), (3.33) было осуществлено моделирование работы замкнутой системы управления на ЭВМ. Графики изменения температурного поля в камере
( H1(x, y = 0,6,τ) |
- |
кривые, изображенные сплошными линиями, |
H 2 (x, y = 0,6,τ) |
- |
кривые, изображенные пунктирной линией ) см. рис. |
3.16, в различные моменты времени τ, были построены при использовании результатов моделирования замкнутой системы управления. При этом на вход системы (см. рис. 3.15) были поданы воздействия
|
260 i, |
i ≤ 3; |
F1 |
|
800, |
i = 4; |
(xi , yν ) = |
|
|
500, |
i = 5. |
|
|
F2 (xi , yν ) = F1(xi , yν ) + 24 , (i =1,5; ν =1,4) .
Примечание: если распределенный объект имеет «m» функций входа и «m» функций выхода, то синтез регуляторов R(ξ) (х, у, s), (ξ =1, m)
осуществляется по рассмотренной выше процедуре. При этом матрица комплексных передаточных коэффициентов объекта может быть записана в виде блочной матрицы
|
|
|
|
|
|
|
|
|
|
Ф11( jω) |
L Ф1m ( jω) |
|
Ф( jω) = |
|
K K K |
|
, |
|
|
|
|
|
|
|
|
|
|
|
Фm1( jω) |
K Фmm ( jω) |
|
где Фγ ,ξ ( jω); (γ ,ξ = |
|
) |
- матрицы комплексных передаточных |
1, т |
коэффициентов объекта, связывающие γ -й вход с ξ -м выходом.
Рис. 3.16. Графики температурных полей.
3.3 Частотный метод синтеза многомерных систем
Частотный метод синтеза распределенных систем, рассмотренный выше позволяет синтезировать распределенный регулятор, передаточная функция которого описывается оператором, содержащим частные производные. Входные воздействия в распределенный регулятор и объект реализуются в виде дискретной по пространству функции, а значения функции выхода распределенного объекта измеряются в конечном числе
точек, что |
обусловливает матричное представление передаточных |
функций распределенного регулятора и объекта. |
|
В настоящем разделе разработанная процедура синтеза |
распределенных |
систем |
рассматривается применительно к синтезу |
алгоритмов |
|
145 |
|

управления многомерных систем. Получена дискретная форма записи условия пространственной инвариантности, выполнение которого существенно упрощает процедуру синтеза.
3.3.1 Дискретная форма записи условия пространственной инвариантности
Пусть задана матрица комплексных передаточных коэффициентов объекта, связывающая ξ −ый вход с m - м выходом:
W ( jω) =[Wm,ξ ], |
(m,ξ = |
1, n |
) |
(3.51.) |
Предполагается, что входное воздействие на объект управления может быть представлено в виде ряда:
|
n |
|
π η yγ |
|
|
|
|
|
|
|
|
|
|
|
|
|
αγ (τ) = ∑Cη (τ) sin( |
|
), |
(γ =1, n) |
(3.52.) |
|
L |
|
η=1 |
|
|
|
|
|
|
|
где L = y (n +1); |
yγ = y γ |
|
|
|
|
|
y − заданное положительное число (шаг дискретизации); yγ − точки дискретизации(γ =1, n) .
Полагая в (3.52) Cη (τ) = exp( jωτ) , где ω - круговая частота, определим реакцию объекта на каждую составляющую ряда (3.52)
|
|
n |
|
Tη,γ ( jωτ) = exp( jωτ) ∑Wγ ,ξ |
sin(π η ξ /(n +1)), |
|
|
ξ=1 |
|
(η,γ = |
|
) |
(3.53.) |
1, n |
Согласно определению, объект принадлежит к классу пространственно - инвариантных, если комплексный передаточный коэффициент по каждой пространственной моде
Wη ( yγ , jω) = Tη,γ /(exp( jωτ) sin(π η γ ) /(n +1))) |
(3.54.) |
не зависит от пространственных координат. Для пространственноинвариантного объекта может быть записано следующее соотношение:
|
Wη ( yγ , jω) =Wη ( jω) , |
|
(γ = |
1, n |
) |
(3.55) |
Подставляя (3.54) в (3.55) и преобразуя, получим дискретный |
аналог условия |
пространственной инвариантности объекта: |
|
n |
|
|
|
|
|
|
|
|
|
|
∑Wγ ,ξ |
sin(π η ξ /(n +1)) =Wη sin(π η γ /(n +1)), |
(3.56) |
ξ=1 |
|
|
|
|
|
|
|
|
|
|
Представим уравнение (3.56) в виде: |
|
|
|
|
|
|
|
W χη =Wη χη , |
|
(γ = |
|
) |
(3.57.) |
|
|
1, n |
где χη =[χη,ξ ], |
(ξ = |
|
) ; |
χη,ξ |
= sin(π η ξ /(n +1)) |
|
1, n |
|
Из соотношения (3.57) следует, что объект, матрица комплексных передаточных коэффициентов которого имеет вид (3.5.), принадлежит к
классу пространственно-инвариантных, если |
χη , (η = |
1, n |
) |
является |
собственными векторами матрицы W. |
|
|
|
|
|
|
|
|
|
Примечание: значения векторов χη могут |
быть вычислены |
из |
следующих |
соотношений: χη = sin(αη,ξ ) |
или |
|
χη = cos(αη,ξ ) , |
где |
αη,ξ = |
π η ξ |
, или α =π (η − 0,5) ξ /(n +1) , |
(η,ξ = |
|
) . |
|
|
1, n |
|
|
n +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, число возможных значений вектора χη ограничено, |
следовательно, |
может |
быть |
разработан |
алгоритм |
проверки |
принадлежности χη собственным вектором матрицы W. |
|
|
3.3.2 Синтез многомерных систем управления
Методику синтеза систем управления рассмотрим на примере синтеза регулятора для системы управления объектом, передаточная матрица которого имеет вид:
|
|
K m,ξ |
|
|
|
|
|
|
|
|
(m,ξ =1,5) |
|
W0 |
(s) = |
|
|
|
, |
(3.58) |
|
s 2 + 20 |
s +1 |
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
где матрица коэффициентов
|
0,398 |
0,178 |
0,0889 |
0,053 |
0,0237 |
|
0,178 |
0,487 |
0,231 |
0,112 |
|
|
|
0,0531 |
K = [Km,ξ ]= 0,0889 |
0,231 |
0,511 |
0,231 |
0,0891 |
|
0,053 |
0,112 |
0,231 |
0,487 |
0,178 |
|
|
|
|
|
0,053 |
0,0892 |
0,178 |
0,399 |
|
0,0237 |
|
Постановка задачи: для системы управления объектом, передаточная матрица которого имеет вид (3.58), синтезировать регулятор, реализующий пропорционально – интегрально – дифференциальный закон управления. При этом на запас устойчивости по фазе ϕ и на значение
параметра ~ (см. п. 3.3) наложены следующие условия:
ϕ ≥ 0,872, ~ = 0,5 .
3.3.2.1 Синтез регулятора
Собственными векторами матрицы (3.58.) являются χη , значения которых вычисляются из следующих соотношений:
χη = [sin(π η ξ / 6)], |
(ξ = |
|
|
(η = |
|
|
|
|
1,5) , |
1,5) |
|
Соответствующие собственные значения равны: |
|
|
|
|
|
|
λη (s) = |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(η =1,5) |
(3.59) |
|
s 2 + 20 |
s +1] |
|
η [100 |
|
|
|
|
|
|
|
|
Таким образом, объект принадлежит к |
классу пространственно- |
инвариантных. |
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция регулятора, реализующего пропорционально
— интегрально — дифференциальный закон управления, рассмотрена в п.
3.3 |
|
|
|
Определение |
параметров |
регулятора |
будем осуществлять, |
исходя из условия, что значения частот среза |
|
модуля разомкнутой системы (ωη ) равны значениям частот линии
перегиба амплитудной характеристики регулятора (см. п 3.3). Тогда частоты среза модуля разомкнутой системы могут быть определены из следующего уравнения:
148
−π + ϕ = arctg(Im(λη (s)) / Re(λη (S)))S = jω , |
(η = |
|
|
(3.50) |
1,5) |
Подставляя значения ϕ = 0,872 в (3.50) и проведя соответствующие |
вычисления, получим ωη = 0,2414 , (η = |
|
|
Выбрав |
η =1 |
и η = 5 |
и |
1,5) . |
подставив вычисленные значения ω |
η |
и |
G |
(G = Ψ2 = (π η / 6)2 ) ) |
в |
|
|
|
η |
η |
η |
|
|
уравнение, определяющее точку перегиба, получим следующие соотношения:
|
|
|
|
|
|
|
|
|
|
|
n4 −1 |
|
|
|
|
1 |
|
|
|
|
|
lg 0,2414 = 0,5 lg E4 |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
0,247 |
− |
|
|
|
|
|
n4 |
|
n4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(3.51) |
|
|
n2 −1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 0,5 lg E2 |
|
|
|
+ |
|
|
|
|
|
|
0,247 |
|
|
|
|
|
|
|
|
|
n2 |
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n4 −1 |
|
|
|
|
1 |
|
|
|
|
|
|
lg 0,2414 = 0,5 lg E4 |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
6,853 |
|
− |
|
|
|
|
n4 |
|
|
|
n4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(3.52) |
|
|
n2 −1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 0,5 lg E2 |
|
|
|
|
+ |
|
|
|
|
|
|
|
6,853 |
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычитая (3.52) из (3.51) и преобразуя, придем к следующему |
результату: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
4 |
−1 + 6,853 |
|
|
n |
2 |
|
−1 + 6,853 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0 |
(3.53) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lg |
|
−1 + 0,247 |
− lg |
|
|
|
−1 + 0,247 |
|
n4 |
|
|
n2 |
|
|
|
|
|
Из (3.53) следует, что |
n4 = n2 . |
Положим |
n4 = n2 = ∞. Для |
определения параметров E2 и E4 |
к уравнению (3.51) допишем уравнение, |
связывающее параметры регулятора с ~ (см.п.3.3.): |
|
~ |
|
~ |
~ |
(3.54) |
|
= lgω1 − lgω2 |
Рассматривая совместно (3.51) и (3.54), получим: Е4 = 0,14, Е2 = 2,3
149