

Bystrov_Grigorye_Pershin_-_Sintez_raspredelennykh_regulyatorov
.pdf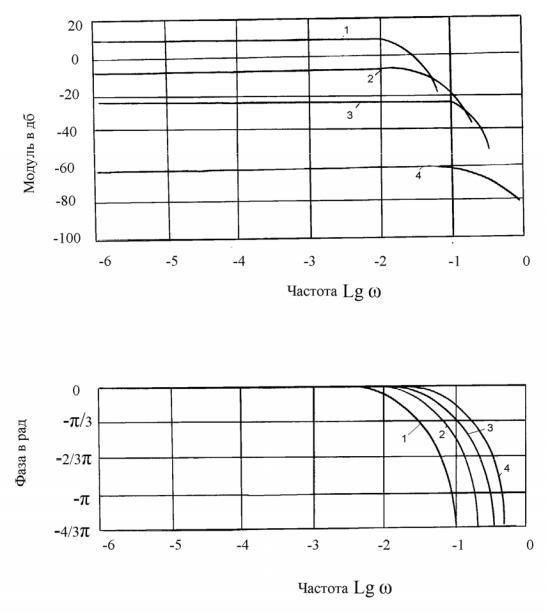
Рис. 4.14. Уточненные частотные характеристики
4.3.2 Синтез распределенного высокоточного регулятора
Постановка задачи: для объекта, заданного частотными характеристиками, приведенными на рис. 7.10. синтезировать
распределенный |
высокоточный |
регулятор |
со |
следующими |
||
показателями: |
|
L(G) ≥10дБ, |
|
|
|
|
1. |
запасы по модулю - |
|
|
|
||
2. |
запасы по фазе – (ϕ(G) ≥ 30o), |
|
|
|
||
3. |
значение параметра - |
= 0,45 . |
|
|
|
|
181
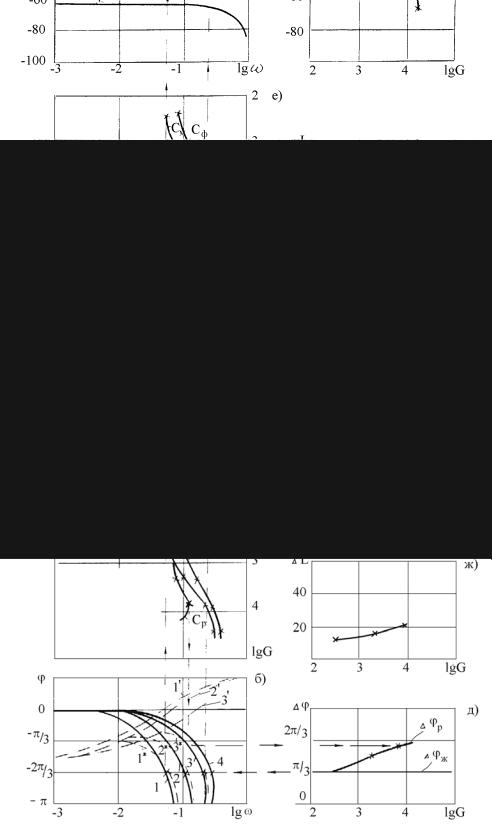
Рис. 4.14. Синтез РВР
Полученные точки перенесем на график рис. 4.14,г и строим кривую lg(ωж(G) .
183



Рис. 4.15. Структурная схема регулятора
Из конструктивных условий число секций секционного нагревателя выбрано равным 4. Ширина каждой секции равна 2,5 см..
Запишем дискретные аналоги соотношений (4.55) и (4.56)
~ |
T (xi ,τγ ) + 0,035 ∑ T (xi ,τγ ) τγ , |
(4.57) |
||||
q(xi ,τ) = 3.16 |
||||||
|
|
|
γ |
|
||
|
(i = |
|
γ =1,2.....), |
|
||
|
1,4; |
|
||||
T (xi ,τγ ) =Tзад(xi ,τγ ) −T3 (xi , |
|
,τγ ), |
(4.58) |
|||
R |
||||||
где i - точки дискретизации по пространству (i =1,4) ; γ - точки дискретизации по времени;
τγ =τγ −τγ −1
Далее в структурной схеме регулятора следует нелинейный блок, описанный выше, который преобразует q в F.
Функции выхода (см. рис. 4.15) определяется из следующего
соотношения: |
|
|
|
|
U (x,τγ ) = F(x,τγ ) −10−3 |
∂2 F(x,τγ ) |
+10 |
T (x,τγ ) − T (x,τγ −1) |
. |
∂x2 |
|
|||
|
|
τγ |
||
|
|
|
(4.59) |
|
Заменяя частную производную в (4.59) кончено-разностными соотношениями, получим:
187
