

Bystrov_Grigorye_Pershin_-_Sintez_raspredelennykh_regulyatorov
.pdf3.2 Синтез регуляторов для распределенных систем управления с векторным входным воздействием
В предыдущих разделах были рассмотрены вопросы синтеза
регуляторов для |
систем |
управления распределенными объектами, |
||
При этом полагалось, что система имеет один вход и один выход. |
||||
Многие полученные ранее результаты могут быть использованы при |
||||
синтезе регуляторов |
для |
систем управления |
распределенными |
|
объектами, |
не |
принадлежащими к классу |
пространственно- |
|
инвариантных, а также при синтезе регуляторов, для систем управления с
векторным входным воздействием. |
|
|
|
|||
В |
этом |
разделе |
приводится |
графическая |
интерпретация |
|
критерия |
Найквиста |
для |
оценки |
устойчивости |
систем, не |
|
принадлежащих к классу пространственно — инвариантных, |
||||||
С |
использованием |
графической |
интерпретации критерия |
|||
устойчивости Найквиста разработана методика синтеза регуляторов для распределенных систем с векторным входным воздействием.
3.2.1 Общие замечания к синтезу систем, не принадлежащих к классу пространственно - инвариантных
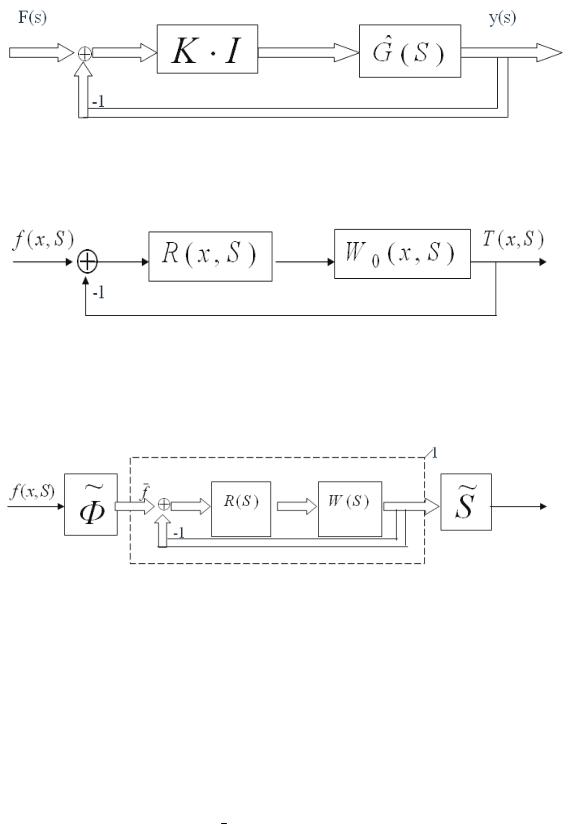
Приведем основной результат, полученный в /35/ относительно обобщения критерия Найквиста на случай распределенных систем, структурная схема которых показана на рис. 5.1. (где К — скаляр; I — единичная матрица (m х m): G ( s ) - матрица размерами m x m, элементы которой являются рациональными функциями
G(s) = H (s) (D(s)) −1;
limdetD(s) =const≠0.
S→∞
Исследуя
m |
|
λ i (s)) . |
det [I + K G (s)]= Ï (1 |
+ K |
|
i =1 |
|
|
в / 35 / показано, что если передаточная матрица разомкнутой системы не имеет полюсов, лежащих в правой полуплоскости S, то для устойчивости замкнутой системы достаточно, чтобы годографы вектора собственных значений (λi ( jω) ) не охватили точку с координатами
130
Re = −1/ K ; Im = 0 .
Рис. 3.9. Система управления.
Рис. 3.10. Распределенная система управления.
Рис. 3.11. Преобразованная структурная схема.
Полученный результат обобщается и на системы управления, структурная схема которых показана на рис. 3.10. (где R(x, s) -
передаточная функция регулятора). Полагаем, что регулятор принадлежит
к классу пространственно-инвариантных ( f (x, s) - |
входное воздействие, |
T (x, s) - функция выхода). |
|
Структурная схема, представленная на рис. |
3.10, может быть |
|
~ |
преобразована к схеме, представленной на рис. 3.11, где Ф - блок, |
|
символизирующий операцию разложения функции |
f(x,s) в ряд Фурье по |
пространственной координате; f (s) — вектор коэффициентов разложения
131

функции f (x, s) в |
ряд |
Фурье (f |
(s) = [fi (s)];i = |
|
); |
1, ∞ |
|||||
ˆ |
|
матрица регулятора. |
|||
R(s) - передаточная |
|||||
Так как регулятор обладает свойством пространственной инвариантности, то передаточная матрица регулятора имеет диагональную
ˆ |
|
|
|
|
|
|
|
|
|
= diagRη,η ; |
η =1, ∞); W – передаточная матрица объекта |
||||||||
форму ( R |
|||||||||
(W = [Wη,i ]; |
|
η, i = |
|
); |
Wη,i - реакция объекта по η-му выходу на i—й |
||||
1, ∞ |
|||||||||
вход (η, i = |
|
|
~ |
|
|
|
|
||
|
|
|
|
|
|||||
1, ∞ ); S - блок, выполняющий операцию умножения входного |
|||||||||
воздействия на вектор, состоящий из тригонометрических функций. Если
входное воздействие |
представлено в |
виде |
ряда Фурье по sin(.), то |
||||
|
~ |
|
|
|
|
|
|
передаточная матрица блока S имеет вид: |
|
|
|
||||
~ |
|
|
|
~ |
|
|
|
|
|
|
|
|
|
||
S = |
[sin(Ψi x)], i =1, ∞, ( S - вектор-строка). |
||||||
Если входное воздействие представлено в виде ряда Фурье по cos(.), |
|||||||
то |
|
|
|
|
|
|
|
|
~ |
|
x)], i |
|
|
|
|
|
|
=1, ∞. |
|||||
|
S = [cos(Ψi |
||||||
Для асимптотической устойчивости системы, представленной на рис. 5.3, достаточно обеспечить асимптотическую устойчивость контура
1.
Передаточная матрица блока 1 (рис. 3.11) может быть записана на виде:
Ô(s) = [I +W R]−1 W R
Рассмотрим формирование структуры передаточной матрицы регулятора R . Положим, что регулятор выбран в виде идеального пространственно-интегрирующего звена, передаточная функция которого записывается в виде следующего соотношения:
|
n |
4 |
−1 |
|
1 |
|
2 |
|
|
1 |
|
||
R(x, s) = E4 |
|
|
|
|
− |
|
|
|
|
|
. |
||
|
|
|
|
|
|
|
|||||||
|
n4 |
n4 |
|
|
s |
||||||||
|
|
|
|
|
|
|
|
||||||
Представляя входное воздействие в виде ряда Фурье по пространственным координатам, и определив передаточную функцию по каждой составляющей ряда входного воздействия, получим
132

|
n |
4 |
−1 |
|
1 |
2 |
|
|
1 |
|
||
Rη (x, s) = E4 |
|
|
|
|
|
|
|
|
|
, |
||
|
|
|
|
+ |
|
Ψη |
|
|
||||
|
n4 |
n4 |
|
s |
||||||||
|
|
|
|
|
|
|
||||||
(η =1, ∞) .
Передаточная матрица регулятора R может быть представлена в виде:
|
~ |
|
0 |
|
|
R |
~ |
|
|||
|
1,1 |
|
|
, |
|
R = |
|
R2,2 |
|
|
|
|
0 |
|
K |
|
|
|
|
|
|
|
|
~ |
∞) |
где Rη,η (s) = Rη (s) , (η =1, |
Таким образом, передаточная матрица разомкнутой системы имеет
вид
W11 |
~ |
(s), W12 |
~ |
|
(s), |
K |
|
||
(s) R11 |
(s) R22 |
|
|||||||
|
|
~ |
|
|
~ |
(s), |
|
|
|
W |
21 |
(s) R (s), W |
22 |
(s) R |
|
K |
(3.30) |
||
Фp (s) = |
~11 |
|
~22 |
(s), |
|
||||
W (s) R (s), W (s) R |
22 |
K |
|
||||||
|
31 |
11 |
|
32 |
|
|
|
|
|
|
|
K |
|
|
K |
|
|
K |
|
Если на вход системы, структурная схема которой приведена на рис. 3.11, подать входное воздействие
f (x, s) = C1(s) sin(Ψ1 x) ,
то на выходе разомкнутой системы будем иметь
~ |
Фp (s) f , |
(3.31) |
|||
T (x, s) = s |
|||||
где |
|
|
C (s) |
||
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
= |
0 |
|
|
f |
||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
... |
|
|
Преобразуя (3.31), получим
133
∞
T (x, s) = С1(s) ∑Wi,1(s) R1,1(s) sin(Ψ1 x) . i=1
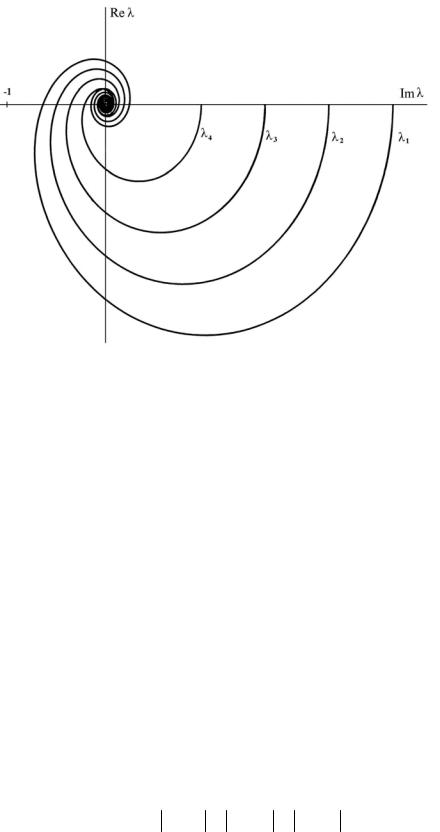
Рис. 3.12. Годографы собственных значений.
Подставляя в (3.30) S = jω , получим матрицу комплексных
передаточных коэффициентов разомкнутой системы.
Положим, что может быть определен бесконечный спектр
* *
собственных значений матрицы Фp ( j ω) (где ω — фиксированное
*
значение частоты ω [0, ∞]).
*
Изменяя значение ω от 0 до ∞ , построим годографы спектра собственных значений (при этом полагаем E4 и n4 — заданные числа). Пусть передаточная функция разомкнутой системы не имеет полюсов, лежащих в правой полуплоскости S, тогда для устойчивости замкнутой системы достаточно, чтобы бесконечный спектр годографов собственных
значений ( λi ( jω), i = |
1, ∞ |
) не охватывал точку с |
координатами |
Re = −1, Im = 0 (на рис. 3.12 показаны годографы для первых четырех
собственных значений). Для оценки устойчивости замкнутой системы могут быть использованы амплитудная и фазовая частотные характеристики годографов собственных значений. При построении характеристик будем полагать, что λ1(0) > λ2 (0) > λ3 (0) > ...
134
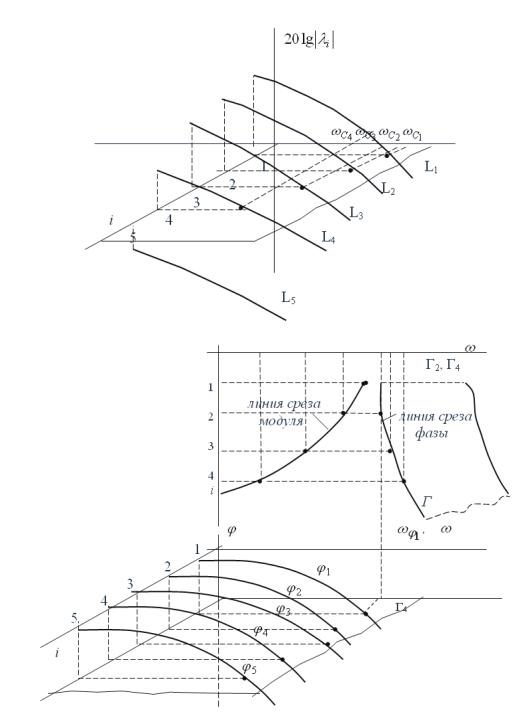
( i = |
Li = 20 lg |
|
λi ( jω) |
|
, |
ϕi = arctg(Im λi ( jω) / Re λi ( jω)), |
|
|
|
||||||
|
). |
|
|||||
1, ∞ |
|
||||||
(См. рис. 3.13 ) |
|
||||||
Рис. 3.13. Построение линий среза модуля и фазы. Аналогично п.2.4. строятся линии среза модуля и фазы разомкнутой
системы.
Интерпретация критерия Найквиста с учетом построенных частотных характеристик, приведенных на рис. 3.13, заключается в
135
следующем: пусть передаточная функция разомкнутой системы не имеет полюсов, лежащих в правой полуплоскости. Тогда для устойчивости замкнутой системы достаточно, чтобы линия среза модуля не имела с областью Г общих точек.
Используя полученную интерпретацию критерия Найквиста, можно определить значения коэффициентов E4, n4, при которых замкнутая система будет устойчива и запасы устойчивости годографов собственных значений по модулю и по фазе разомкнутой системы не менее заданных.
3.2.2 Синтез распределенных систем управления с векторным входным воздействием
Методику синтеза рассмотрим на примере синтеза регуляторов для системы управления температурным полем нагревательной камеры, используемой для термической обработки листовых заготовок 1 (см. рис. 3.14). Конструкция нагревательной камеры включает, корпус 2,
два секционных нагревателя |
3 |
(число секций |
каждого |
секционного |
||||||||||
нагревателя равно |
20). |
|
Внутри |
камеры |
в |
точках |
{xi , yv , z1}; |
|||||||
{xi , yv , z2}, (i = |
|
|
v = |
|
) установлены термопары 4. |
|
||||||||
1,5; |
1,4 |
|
||||||||||||
Геометрические параметры камеры равны: |
|
|
|
|
|
|||||||||
|
z1 = 0,145м; |
z2 = 0,085м; |
z3 = 0,08м |
|
||||||||||
|
|
|
|
z1 = 0,105м; |
z2 = 0,04м; |
|
|
|
|
|||||
|
|
|
|
|
xL = 2,4м; |
yL =1,5м; |
|
|
|
|
||||
|
xi = |
x i, |
(i = |
|
|
yv = y v, |
(v = |
|
|
|
||||
|
1,5); |
1,4); |
|
|||||||||||
|
|
|
|
|
|
x = 0,4м; |
y = 0,3м. |
|
|
|
|
|||
Постановка задачи: для системы управления температурным полем
нагревательной камеры синтезировать распределенные регуляторы R(1)(х, у, s) и R(2)(х, у, s), реализующие пропорционально-интегрально-
дифференциальные законы управления, с учетом ограничений на запасы устойчивости по фазе ϕ(ξ)
ϕ(ξ) ≥ 0,8, |
(ξ =1,2) . |
3.2.2.1 Анализ объекта управления
Для оценки динамических характеристик сформируем математическую модель объекта управления. При этом сделаем следующие допущения: температура на входе и выходе камеры поддерживается постоянной; тепловой поток через боковые стенки камеры
136

равен нулю; |
скорость движения заготовки, вследствие малости |
(υ = 0,001м/ с), |
примем равной нулю. С учетом принятых допущений, |
математическая модель объекта управления имеет вид:
|
|
|
∂T |
|
∂2T |
|
∂2T |
|
∂2T |
|
|
|
|||
|
|
|
i |
|
|
i |
+ |
|
i |
+ |
|
i |
|
, |
(3.32) |
|
|
|
∂τ |
= a |
∂x |
2 |
∂у |
2 |
∂z |
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
(i = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,3) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 < x < xL , 0 < y < yL , |
|
|
zi+1 < z < zi , |
|
|||||||||||
Рис. 3.14. Нагревательная камера
Рис. 3.15. Структурная схема системы управления.
Граничные условия для системы уравнений (3.32) задаются
137
следующими соотношениями: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
λi |
∂Ti (x, y, zi+1,τ) |
= λi+1 |
∂Ti+1(x, y, zi+1,τ) |
, |
(3.33) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
||
|
Ti (x, y, zi+1,τ) =Ti+1 (x, y, zi+1,τ) , |
|
(i =1,2) , |
|
|
|||||||||||||||||||||||
|
λ |
∂T1 (x, y, z1 ,τ) |
=U |
1 |
(x, y,τ) , |
|
|
|
0 < x < x |
L |
, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
1 |
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
λ3 |
|
∂T3 (x, y,0,τ) |
|
=U 2 (x, y,τ) , |
|
|
0 < y < yL , |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ti (0, y, z,τ) =Ti (xL , y, z,τ) = 0 , |
|
|
zi+1 < z < zi , |
|
|
||||||||||||||||||||||
|
|
∂Ti (x,0, z,τ) |
|
= |
∂Ti (x, yL , z,τ) |
= 0 , |
(i =1,3), |
(z4 = 0) , |
|
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|||
|
где х, у, z, |
— пространственные координаты; τ - |
время; |
λ1, λ3 - |
||||||||||||||||||||||||
коэффициент |
|
теплопроводности |
воздуха |
( λ1 = λ3 = 0,059 ), |
|
λ2 - |
||||||||||||||||||||||
коэффициент |
|
|
теплопроводности |
материала листовой заготовки |
||||||||||||||||||||||||
(λ2 = 20,1) ; а1, |
а3 |
|
|
|
коэффициент температуропроводности |
воздуха |
||||||||||||||||||||||
(а |
= а |
3 |
= 0,4 10−5 ) ; |
|
|
а |
2 |
- |
коэффициент |
|
температуропроводности |
|||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
материала заготовки |
(а2 = 0,19 10−4 ) ; Тi (x, y, z,τ) - температурное поле в |
|||||||||||||||||||||||||||
i—й среде;Uξ (x, y,τ) |
- ξ -е входное воздействие(ξ =1,2) . |
|
|
|
|
|
||||||||||||||||||||||
|
Функциями |
|
|
|
|
выхода |
|
|
будут |
Н1 =Т1(x, y, |
|
,τ) |
|
и |
||||||||||||||
|
|
|
|
|
|
|
z1 |
|
||||||||||||||||||||
Н2 = Т3 (x, y, |
|
,τ) . |
Для |
|
|
анализа |
объекта управления |
представим |
||||||||||||||||||||
z2 |
|
|
||||||||||||||||||||||||||
U1(x, y,τ) в виде: |
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
U1(x, y,τ) = |
∑e jωτ sin(Ψν x) cos(ϕγ |
y) |
(3.34) |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
ν,γ =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
где |
|
Ψ |
|
= π ν |
; |
|
|
|
|
ϕ |
= π ν ; |
ω - круговая частота. |
|
||||||||||||||
|
|
|
|
|
ν |
|
|
|
xL |
|
|
|
|
|
|
ν |
|
|
yL |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Полагая U2=0 и определяя комплексный передаточный коэффициент объекта по каждой составляющей ряда (3.34), получим
|
(1) |
|
|
|
|
(1) |
|
α1 |
z |
|
|
(1) |
|
−α z |
W |
(z |
|
, jω) = A |
e |
1 |
+ B |
e |
|||||||
|
1 |
|
|
|
|
1 1 , |
||||||||
1,ν,γ |
|
|
ν,γ |
|
|
|
|
ν,γ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.35) |
|
138

W (2) |
( |
|
2, jω) = A(3) |
eα3 |
z |
21 + B(3) |
|||||||||
z |
|||||||||||||||
1,ν,γ |
|
|
|
|
|
|
ν,γ |
|
|
|
|
ν,γ |
|||
|
|
|
2 |
|
2 |
|
jω |
12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||
|
Ψν |
+ϕγ |
+ |
|
, (i =1,3) ; |
||||||||||
|
|||||||||||||||
где αi = |
|
|
|
ai |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
e−α3z2
значения коэффициентов
Aν(i,γ) и Bν(i,γ) определяется из следующего уравнения:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D A = C , |
|
|
|
|
|
|
|
(3.36) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
где |
CT = [1,0,0,0,0,0,]; |
|
AT = [Aν(1,γ) , Bν(1,γ) , Aν(2,γ) , Bν(2,γ) , Aν(3,γ) , Bν(3,γ) ]; |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
α1z1 |
|
|
−α e |
−α1z1 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
||||||||||
|
α e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
1 |
α z |
|
|
|
1 |
|
−α z |
|
|
λ2 |
|
|
|
|
α z |
|
λ2 |
|
|
|
|
|
|
|
|
−α z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
−α e |
|
− |
α |
|
|
|
α |
|
|
|
e |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|||||||||||||||||||||||
|
α e |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
1 |
|
1 2 |
|
|
1 |
|
|
|
|
1 2 |
|
|
|
|
|
2 |
|
2 |
2 |
|
|
|
|
|
|
|
2 |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
|
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
α z |
|
|
e |
−α z |
|
|
|
1 |
|
|
α z |
|
|
1 |
|
|
|
|
|
|
−α z |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
||||||||||||||
D = |
|
e |
1 2 |
|
|
|
|
|
1 2 |
|
|
− e |
2 2 |
|
|
|
−e |
|
|
|
2 2 |
|
|
|
λ3 |
|
|
|
|
|
|
|
|
λ3 |
|
|
||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
α2eα2z3 |
|
|
−α2e−α2z3 |
− |
|
α3eα3z3 |
|
α3e−α3z3 |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α z |
|
|
|
|
|
|
|
|
−α z |
|
|
|
λ2 |
|
|
|
|
|
|
|
λ2 |
−α z |
|
|||||||||||||
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
α z |
|
−e |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
e 2 3 |
|
|
|
|
|
|
|
|
|
2 3 |
|
|
|
− e |
3 3 |
|
|
|
|
|
3 3 |
|
|||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
α3 |
|
|
−α3 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
Запишем (3.35) в следующем виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
α1 |
(Gη ) |
z |
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
−α1 (Gη ) |
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
(Gη , z1, jω ) = |
|
|
|
|
|
|
|
|
1 |
|
|
+ |
B |
(Gη ) e |
z |
, |
|
|
|
|||||||||||||||||||||||||||||||
|
|
W1 |
A (Gη ) e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
+ B(3) e−α3 (Gη ) |
|
2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
W (2) (G , |
|
|
2, jω ) = A(3) (G ) e−α3 |
z |
21 |
z |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
z |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(G |
|
|
) = (G |
|
jω |
|
|
1 |
2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
где α |
i |
|
|
+ |
|
) |
|
(i =1,3) ; |
|
|
|
|
G |
|
|
- дискретная |
функция, |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
η |
|
|
|
|
η |
|
ai |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
принимающая все значения функции Ψ2 |
+ ϕ 2 |
для ν,γ = |
|
. |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
1, ∞ |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
|
|
|
|
|
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Полагая |
|
|
U1 = 0 |
|
и |
|
|
|
|
определяя |
|
|
|
|
комплексный передаточный |
|
||||||||||||||||||||||||||||||||||||
коэффициент объекта, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
) = A(3) (G ) eα3 |
(Gη ) |
|
2 |
|
+ B(3) (G ) e−α3(Gη )z2 , |
|
|
||||||||||||||||||||||||||||||||||||
|
|
W |
(2) |
(G , |
|
|
|
|
|
|
z |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
z |
2 , jω |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
η |
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
139