

Bystrov_Grigorye_Pershin_-_Sintez_raspredelennykh_regulyatorov
.pdfРис. 2.29. Графики коэффициентов усиления
Рис. 2.30. Графики частотных характеристик.
Рис. 2.31. График зависимости частоты среза фазы от G.
Полученные частотные характеристики могут быть использованы в процедуре синтеза систем управления. При этом в результате синтеза могут быть определены параметры Ly – длина Б.П. и Lz - толщина Б.П.,
обеспечивающие заданное качество процесса регулирования.
90

2.2.5 Исследование характеристик распределенного звена, охваченного положительной обратной связью
Многие объекты излучают сигналы, которые изменяются не только во времени, но и имеют пространственную форму. При этом достаточно много информации о генерирующем объекте можно получить с помощью анализа пространственных форм ( мод) распределенного сигнала. Как известно, в сосредоточенных системах, для выделения заданной несущей частоты используется колебательный контур. Аналогичное устройство используемое для выделения заданной пространственной частоты (моды) может быть получено с использованием пространственно-усилительного звена .
Положим, что имеется объект, который изучает сигнал
Aη sin(ψη x). На некотором удалении от объекта расположены датчики, с
помощью которых определяется информация о части сигнала (см.
рис.3.32)
Рис. 2.32. Распространение сигнала.
Ставится задача определения пространственной частоты ψ~n по результатам измерений n датчиков (частота ψ~n корелирована с частотой
ψn ).
Для решения поставленной задачи, воспользуемся пространственно-
усилительным звеном, включенным в положительную обратную связь . Функции входа и выхода рассматриваемого блока связаны
соотношением
F(x, y*,τ) = (1+ |
1 |
2 ) u(x,τ), |
(2.63) |
|
T |
||||
|
|
|
где : x – пространственная координата;
91
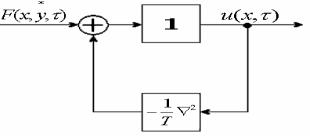
y * - заданное число; τ - время; 2 - лапласиан; T – заданный параметр.
Передаточный коэффициент блока может быть записан в виде
K =1/(1+ (1/T ) 2 ),
или, записывая с использованием обобщенной координаты K = 1/(1 − G /T ).
Рис. 2.33. Структурная схема блока
Подавая на вход рассматриваемого блока воздействие |
~ |
~ |
x), на |
|||||
F = Aη sin(ψ |
||||||||
выходе получим |
~ |
~ |
|
|
|
|
||
|
|
U = |
|
|
|
|
||
~ |
|
1/(1 − G /T ) Aη sin(ψ~η x), |
|
|
|
|
||
= |
~2 |
|
|
|
|
|
|
|
где G |
ψη . |
|
|
~ |
|
|
|
|
Если |
~ |
→ T то, abs(K ) → ∞ т.е. функция выхода, при |
→ T , имеет разрыв. |
|||||
G |
G |
|||||||
Запишем дискретный аналог уравнения (2.63)
Fi, j = Ui, j + (1/(T x2 )) (Ui −1, j − 2Ui, j + Ui +1, j ), |
(2.64) |
||
(i |
= 1, N |
; j = 1,2,..) , |
|
где i – точки дискретизации по пространственной координате; |
x - шаг |
||
дискретизации;
j – точки дискретизации по времени τ . Представим (2.64) в матричном виде
F = A U ,
где
U T = [U 1 , j U N , j ]; F T = [F 1 , j F N , j ];
E1 =1−(2 −C1 ) /(T X 2 ); Eo =1−2 /(T X 2 );
E2 =1/(T X 2 );
E3 =1−(2 −C2 ) /(T X 2 );
С1 =U 0, j / U1 ;
C2 =U N +1, j /U N , j ;−
коэффициенты, учитывающие граничные значения функции U.
92

E |
1 ; |
E 2 ; |
0 |
L |
|
|
|
|
|
|
|
|
|
A = E 2 ; |
E o ; |
E 2 ; |
0 |
|
||
|
|
|
M |
O |
E 2 |
|
|
0 |
|
|
0; |
|
|
|
E 2 ; E 3 |
|||||
Значение вектора U может быть определено из следующего соотношения
U = A−1 F .
Если → ~ , то определитель матрицы → .
T G А 0
Положим, что имеется возможность изменять значение T.Пусть
T = G ,
где G - обобщенная координата . Тогда пробегая числовую ось изменения
, можно определить значение = ~ при котором функция выхода терпит
G G G
разрыв, а следовательно определить значение ~ . Устройство
ψη
определяющее ~ может состоять из нескольких, последовательно
ψη
соединенных блоков, представленных на Рис. 2.33
Пример: На вход устройства (см. Рис. 2.33) было подано воздействие вида
F = 10 sin( ψ~1 |
x ) |
, |
~ |
= 0.001. |
|
|
где ψ1 |
Рассматриваемое воздействие измерялось с помощью набора датчиков (n=32), при этом шаг установки датчиков x =1м. На Рис. 2.34 показано расположение датчиков и измеряемая часть воздействия.
( (ψ~1 = π 1/ Lx → Lx = π /ψ~1 = 3.14/ 0.001 = 3140м)
Рис. 2.34. Входное воздействие. Измеряемая часть сигнала (в виде вектора размерности 32) поступает на
вход устройства. Сканируя пространство изменения, G и определяя,
L = abs(K ), найдем значение, |
~ |
при котором функция выхода терпит |
G = G |
разрыв (значение Т=G при котором определитель A ≈ 0 ). Результаты
93
численного моделирования рассматриваемого устройства, в окрестности
~ |
|
|
|
|
|
G = G приведены ниже. При этом число блоков, используемых в |
|||||
|
рассматриваемом устройстве, было выбрано М=1, М=2, М=3. |
||||
|
|
|
3.3Таблица Результаты вычислений |
||
|
М=1 |
|
|
М=2 |
|
|
lg(G)= -6.100000 |
abs(K)=3.687157 |
|
lg(G)= -6.100000 |
abs(K)=14.240127 |
|
lg(G)= -6.090000 |
abs(K)=4.146019 |
|
lg(G)= -6.090000 |
abs(K)=18.005010 |
|
lg(G)= -6.080000 |
abs(K)=4.720121 |
|
lg(G)= -6.080000 |
abs(K)=23.336584 |
|
lg(G)= -6.070000 |
abs(K)=5.458632 |
|
lg(G)= -6.070000 |
abs(K)=31.210355 |
|
lg(G)= -6.060000 |
abs(K)=6.444057 |
|
lg(G)= -6.060000 |
abs(K)=43.496080 |
|
lg(G)= -6.050000 |
abs(K)=7.824168 |
|
lg(G)= -6.050000 |
abs(K)=64.122132 |
|
lg(G)= -6.040000 |
abs(K)=9.895629 |
|
lg(G)= -6.040000 |
abs(K)=102.569593 |
|
lg(G)= -6.030000 |
abs(K)=13.348836 |
|
lg(G)= -6.030000 |
abs(K)=186.646089 |
|
lg(G)= -6.020000 |
abs(K)=20.256770 |
|
lg(G)= -6.020000 |
abs(K)=429.806281 |
|
lg(G)= -6.010000 |
abs(K)=40.986455 |
|
lg(G)= -6.010000 |
abs(K)=1759.597438 |
|
lg(G)= -6.000000 |
abs(K)=23989838.444 |
|
lg(G)=-6.000000 |
abs(K)=602819804490000.0 |
|
lg(G)= -5.990000 |
abs(K)=41.939472 |
|
lg(G)= -5.990000 |
abs(K)=1842.379349 |
|
lg(G)= -5.980000 |
abs(K)=21.211337 |
|
lg(G)= -5.980000 |
abs(K)=471.269693 |
|
lg(G)= -5.970000 |
abs(K)=14.303599 |
|
lg(G)= -5.970000 |
abs(K)=214.301059 |
|
lg(G)= -5.960000 |
abs(K)=10.850098 |
|
lg(G)= -5.960000 |
abs(K)=123.310856 |
|
lg(G)= -5.950000 |
abs(K)=8.778973 |
|
lg(G)= -5.950000 |
abs(K)=80.727544 |
|
lg(G)= -5.940000 |
abs(K)=7.398696 |
|
lg(G)= -5.940000 |
abs(K)=57.338310 |
|
lg(G)= -5.930000 |
abs(K)=6.413254 |
|
lg(G)= -5.930000 |
abs(K)=43.081588 |
|
lg(G)= -5.920000 |
abs(K)=5.674750 |
|
lg(G)= -5.920000 |
abs(K)=33.730960 |
|
lg(G)= -5.910000 |
abs(K)=5.100705 |
|
lg(G)= -5.910000 |
abs(K)=27.251842 |
|
lg(G)= -5.900000 |
abs(K)=4.641849 |
|
lg(G)= -5.900000 |
abs(K)=22.569288 |
|
|
|
|
|
|
|
|
|
|
|
|
М=3
lg(G)= -6.100000 abs(K)=54.996777 lg(G)= -6.090000 abs(K)=78.190948 lg(G)= -6.080000 abs(K)=115.377826 lg(G)= -6.070000 abs(K)=178.449158 lg(G)= -6.060000 abs(K)=293.590242 lg(G)= -6.050000 abs(K)=525.506834 lg(G)= -6.040000 abs(K)=1063.149602 lg(G)= -6.030000 abs(K)=2609.725162 lg(G)= -6.020000 abs(K)=9119.595369 lg(G)= -6.010000 abs(K)=75541.640900
lg(G)= -6.000000 abs(K)=15147735052000000000000.0 lg(G)= -5.990000 abs(K)=80934.747897
lg(G)= -5.980000 abs(K)=10470.579037 lg(G)= -5.970000 abs(K)=3210.723503 lg(G)= -5.960000 abs(K)=1401.420295 lg(G)= -5.950000 abs(K)=742.333469 lg(G)= -5.940000 abs(K)=444.358775 lg(G)= -5.930000 abs(K)=289.403635 lg(G)= -5.920000 abs(K)=200.497745 lg(G)= -5.910000 abs(K)=145.599615 lg(G)= -5.900000 abs(K)=109.734506
94

Рис.2.35. Результаты численного моделирования
Как показывают результаты численного моделирования, значения пространственной частоты могут быть определены с большой степенью точности. При этом
используются конечное число результатов измерения распределенного сигнала.
2.2.6 Распределенная система передачи информации
В системах передачи и приема информации выделение каналов осуществляется (в основном) с использованием заданных несущих частот. Методы анализа и синтеза сосредоточенных каналов передачи информации достаточно разработаны.
В распределенном сигнале, помимо временной составляющей, присутствует пространственная форма. Эта пространственная форма может быть использована для выделения дополнительных каналов передачи информации. Помимо этого, если физический объект излучает распределенный сигнал, то, используя анализ пространственных форм (мод) рассматриваемого сигнала, можно получить дополнительную информацию о процессах, протекающих внутри объекта. Это особенно важно при анализе сейсмических процессов. Рассмотрим построение устройств, используемых для передачи и обработки распределенных сигналов.
95

Положим, что имеется источник, который может передать
информацию в виде распределенной функции |
f ( x, y,τ ) сформированной |
|||||||||||||
следующим образом: |
|
|
|
|
|
|
|
|||||||
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
f (x, y,τ) = ∑C j,i (τ) Bj,i (x, y), |
0 < x < Lx , |
0 < y < Ly , |
|
(2.65) |
||||||||||
|
|
|
j,i=1 |
|
|
|
|
|
|
|
|
|
|
|
где |
|
B j,i (x, y) = sin(Ψj |
~ |
|
- |
пространственные |
моды; |
|||||||
|
x) sin(Ψi y) |
|||||||||||||
π |
j |
~ |
π i |
- пространственные частоты; Сj,i (τ) - полезный сигнал по |
||||||||||
Ψj = Lx |
|
, Ψi = Ly |
||||||||||||
j,i -му каналу ( j,i = |
|
); x, y - пространственные координаты; τ - время. |
||||||||||||
1,∞ |
||||||||||||||
Будем полагать, что информация распространяется по каналу, |
||||||||||||||
приведенному на Рис. 2.36. Здесь |
передающее устройство, |
площадью |
||||||||||||
s1 = Lx Ly , генерирует |
|
|
сигнал |
f (x, y,τ) . |
Принимающее |
устройство |
||||||||
принимает |
сигнал |
* |
|
|
|
f (x, y,τ) с |
некоторым |
искажением). |
||||||
f (x, y,τ) (сигнал |
||||||||||||||
Используя пространственные моды в качестве «координирующей» пространственной частоты, мы можем осуществить передачу информации (сj,i (τ)) параллельно, по бесконечному множеству каналов ( j,i =1, ∞) . При
этом, нет особой проблемы в «упаковке» полезной информации (представлении в виде ряда(2.65)). Эту упаковку можно выполнить как с использованием цифровой техники, так и с использованием аналоговых вычислительных устройств. Проблема «распаковки» информации (выделения соответствующих каналов) достаточно сложная задача. Если схема распространения информации соответствует Рис. 2.36, то выделение соответствующих каналов можно осуществить, используя аппарат Фурье, (т.к. значения параметров Lx и Ly полагаются известными), либо, используя
пространственные фильтры (методику построения которых рассмотрим ниже).
Рис. 2.36. Схема распространения информации.
96

Положим, что параметры передающего устройства неизвестны, причем принимающее устройство осуществляет прием некоторой части
сигнала |
* |
|
|
как |
показано |
на Рис. |
2.37. |
Здесь |
S3 |
– |
область |
||||
f (x, y,τ) |
|||||||||||||||
распределения |
приходящей |
|
информации |
|
* |
|
|
|
|||||||
|
|
f (x, y,τ) (полагается |
|||||||||||||
неизвестной); S4 |
– область распределения |
принимаемой |
информации |
||||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( f (x, y,τ)). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В области S4 содержится весь спектр пространственных мод сигнала |
|||||||||||||||
* |
. Проблема состоит в том, |
чтобы |
по |
сигналу |
~ |
|
|
||||||||
f (x, y,τ) |
f (x, y,τ),(x, y s4 ) |
||||||||||||||
выделить |
весь |
спектр |
пространственных |
мод |
* |
|
|
который |
|||||||
f (x, y,τ) , |
|||||||||||||||
коррелирован со спектром |
f (x, y,τ). |
Структурная схема обработки |
|||||||||||||
сигнала |
~ |
|
|
показана на рис.3.38. Сигнал |
~ |
|
|
|
|
|
|||||
f (x, y,τ) |
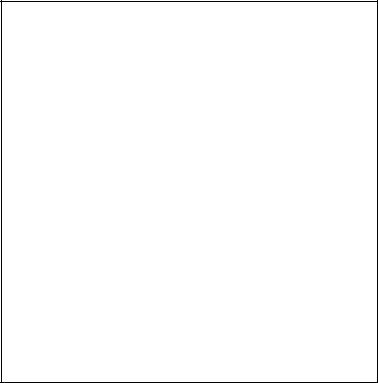
f (x, y,τ) поступает на вход |
||||||||||||||
пространственного сканера, который, сканируя |
~ |
|
|
|
|
|
|||||||||
f (x, y,τ) по пространству |
|||||||||||||||
изменения обобщенной координаты G, определяет значения Gη , (η =1,2,...) |
|||||||||||||||
для пространственных |
мод содержащихся |
в |
распределенном |
сигнале |
|||||||||||
2 |
~ 2 |
используя |
|
обобщенную координату, удается |
свернуть |
||||||||||
(Gη = Ψj |
+ Ψi |
|
|
||||||||||||
дискретные |
|
пространства |
~ |
в |
пространство |
G |
). По вычисленным |
||||||||
|
Ψj , Ψi |
||||||||||||||
значениям Gη , определяются параметры распределенных фильтров,
которые настраиваются на выделенные пространственные моды. После определения параметров пространственных фильтров, работа блока 1 (см. рис.2.38) завершена.
Рис. 2.37. Распространение информации.
97
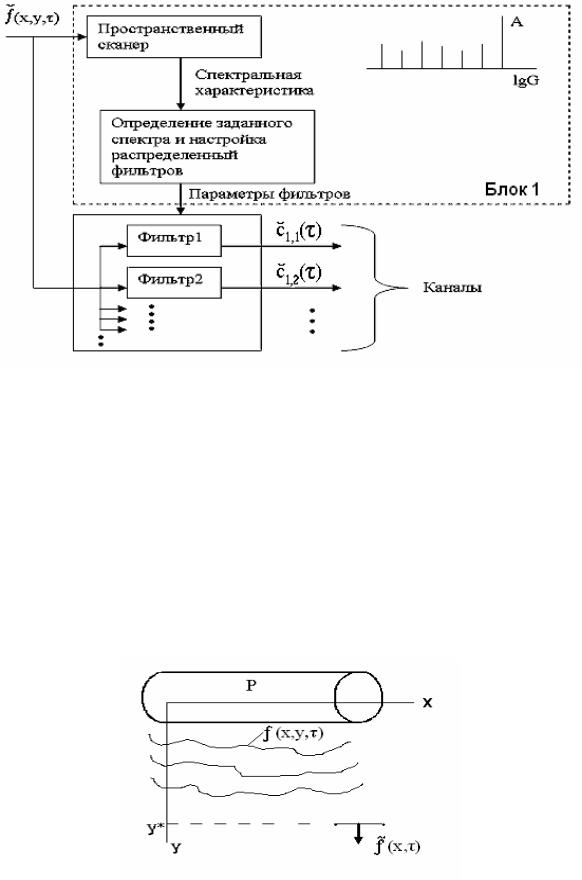
Рис. 2.38. Структурная схема обработки сигнала.
Далее сигнал |
~ |
пространственных фильтров, |
f (x, y,τ) поступает на вход |
||
которые выделяют из входного воздействия |
заданные каналы (оценочные |
|
значения амплитуды Сj,i (τ) заданного спектра пространственных мод) т.е.
осуществляется «распаковка» информации. Рассмотренная схема обработки информации может быть реализована для распределенных объектов любой физической природы.
В качестве примера рассмотрим емкость, расположенную в сплошной среде, в которой могут распространяться колебания корпуса (см. рис.2.39). Полагаем, что давление Р в рассматриваемой емкости мы можем изменять.
Рис. 2.39. Распространение сигнала.
98

При ударе о корпус емкости, в сплошной среде будет распространяться распределенный сигнал (в рассматриваемом случае сигнал распространяется вдоль оси у ). Этот сигнал содержит заданный спектр пространственных мод, может быть представлен в виде
∞ |
|
f (x, y,τ) = Σ Aj ( y,τ) sin(ψ j x) . |
|
j=1 |
|
|
____ |
Положим, что определен характер изменения амплитуд (АJ = |
1, ∞ ). |
Если увеличивать давление P, то корпус емкости при ударе |
будет |
генерировать тот же спектр пространственных мод, но характер изменения амплитуд будет иной (значение max Аj будет смещаться в сторону более
высоких частот пространственных мод). Анализируя изменение амплитуд, мы можем судить о внутреннем состоянии объекта (в рассматриваемом
случае мы можем судить об изменении давления Р). Положим, что для |
||||||
фиксированного значения |
* |
, |
измеряется |
часть |
сигнала |
~ |
y =у |
f (x,τ) . |
|||||
Ставится следующая задача: |
по |
|
измеряемой |
части |
сигнала |
~ |
|
f (x,τ) |
|||||
восстановить характер изменения амплитуд АJ, и оценить динамику изменения давления Р.
Рассматриваемая задача может быть решена с использованием структурной схемы обработки сигнала, показанной на рис.3.38.
2.2.7 Построение пространственного фильтра
Для построения пространственного фильтра будем использовать различные варианты подключения пространственно-усилительного звена, передаточная функция которого имеет вид :
W1 (x, y) = −E1 |
1 |
2 , |
(2.66) |
|
n |
||||
|
|
|
||
|
1 |
|
|
где E1 , n1 - заданные числа, 2 - лапласиан.
Коэффициент усиления рассматриваемого звена может быть записан в
виде
K (G) = E1 G , n1
где G-обобщенная координата.
На рис.3.40 приведены графики статических коэффициентов усиления рассматриваемого звена при E1 = 1.
99