

В. Д. Бертяев, Л. А. Булатов, В. В. Глаголев, В. И. Латышев, А. Г. Митяев. ЭВМ в курсе теоретической
.pdf
|
|
Xa + Xc |
|
|
|
Xa |
|
|
|
−Q + Ya + Yc |
|
|
|
||
|
|
|
|
|
|
Ya |
|
−2 |
|
|
|
||||
|
b Q + b Yc − a Xc + M |
|
|
|
|
|
|
|
3 |
|
|
|
|
Xb |
|
|
|
|
|||||
|
|
−P sin(α) + Xb − Xc |
|
|
0 |
R(α) := Find Yb |
|
|
|
|
|
|
|
|
|
|
|
−P cos (α) + Yb − Yc |
|
|
|
|
Xc |
|
|
|
|
|
|
Yc |
|
|
|
|
|
|
|
|
|
−P (c − s) + c cos (α) Yb + c sin( |
α) Xb |
|
|
|
|
||
Формируем векторы неизвестных реакций в виде двухэлементных матриц, их направление |
|
относительно осиOx , а также вычисляем предельные значения параметра α. |
|
RA(α) := submatrix(R(α),0,1,0,0) |
αA(α) := atan2(RA(α)0,RA(α)1) |
RB(α) := submatrix(R(α),2,3,0,0) |
αB(α) := atan2(RB(α)0,RB(α)1) |
RC(α) := submatrix(R(α),4,5,0,0) |
αC(α) := atan2(RC(α)0,RC(α)1) |
αmin := −π + γ |
|
|
|
|
|
αmax:= π + γ |
|
|||
|
2 |
|
|
|
|
|
|
2 |
|
|
α |
deg− 1 = −33.69 |
|
|
|
|
α |
deg− 1 |
= 146.31 |
|
|
|
min |
|
|
|
|
|
|
max |
|
|
|
|
π |
|
|
|
|
Строим график зависимостей модулей реак- |
|||
α := αmin,αmin + |
.. αmax |
|
|
|
ций от параметра α, изменяющегося в ука- |
|||||
|
|
180 |
|
|
|
занном интервале. |
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
RA(α) |
15 |
|
|
|
|
|
|
|
|
|
RB(α) |
|
|
|
|
|
|
|
|
|
|
RC(α) |
10 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
0 |
30 |
0 |
30 |
60 |
90 |
120 |
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
deg |
|
|
Для вычисления параметра α, соответствующего минимальным значениям реакций связей используем элемент управления Radio Button (см. п. 4.10.2)
I := |
I := |
I := |
jlm| Ra | |
ijlm| Rb | |
jlm| Rc | |
Объединим векторы реакций связей в матрицу, состоящую из трех столбцов, и сформируем
минимизируемую функцию.
R(α) := augment(RA(α),RB(α),RC(α)) Π(α) := R(α) I
Для нахождения минимальных значений реакций связей используем блок Given – Minimize, внутри которого укажем пределы изменения параметра α.
α := 0 |
Given |
61
αmin ≤ α ≤ αmax |
α' := Minimize(Π,α) |
|
α' |
|
= 72.412 |
|
||||||||||
|
|
|
|
|
||||||||||||
Вычисление минимальных значений реакций связей |
|
deg |
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
4.766 |
|
RA(α') |
|
|
|
|
|
(α') deg− 1 |
|
|||||
|
|
|
|
|
|
|
|
|||||||||
R |
(α') = |
|
|
= 10.194 |
α |
|
= 62.123 |
|||||||||
A |
|
9.011 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
14.299 |
|
RB(α') |
|
|
|
|
|
|
(α') deg− 1 |
|
||||
|
|
|
|
|
|
|
|
|
||||||||
R (α') = |
|
|
|
|
= 15 |
α |
= 17.588 |
|||||||||
B |
|
4.533 |
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
−4.766 |
|
R |
(α ) |
|
|
= |
5 |
α |
(α') deg |
− 1 |
= −162.412 |
|||
|
|
|
||||||||||||||
R (α') = |
|
|
' |
|
|
|
|
|||||||||
C |
|
−1.511 |
|
C |
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Осуществляем визуализации проведенных расчетов |
|
|
|
|
|
|
|
|||||||||
|
Reference:C:\Program Files\Mathsoft\user_fun.mcd |
|
|
|
|
|
|
|
||||||||
Формируем векторы реакций связей для их отображения на графике. |
|
|
||||||||||||||
Ra(α) := vector7(0,0,RA(α)0,RA(α)1,1) |
|
|
|
|
Rb(α) := vector7 |
(0,0,RB(α)0,RB(α)1,1) |
||||||||||
Rc(α) := vector7(0,0,RC(α)0,RC(α)1,1) |
|
|
|
|
Ry(α) := augment(Ra(α) 1 ,Rb(α) 1 ,Rc(α) 1 ) |
|||||||||||
Rx(α) := augment(Ra(α) 0 ,Rb(α) 0 ,Rc(α) 0 ) |
|
|||||||||||||||
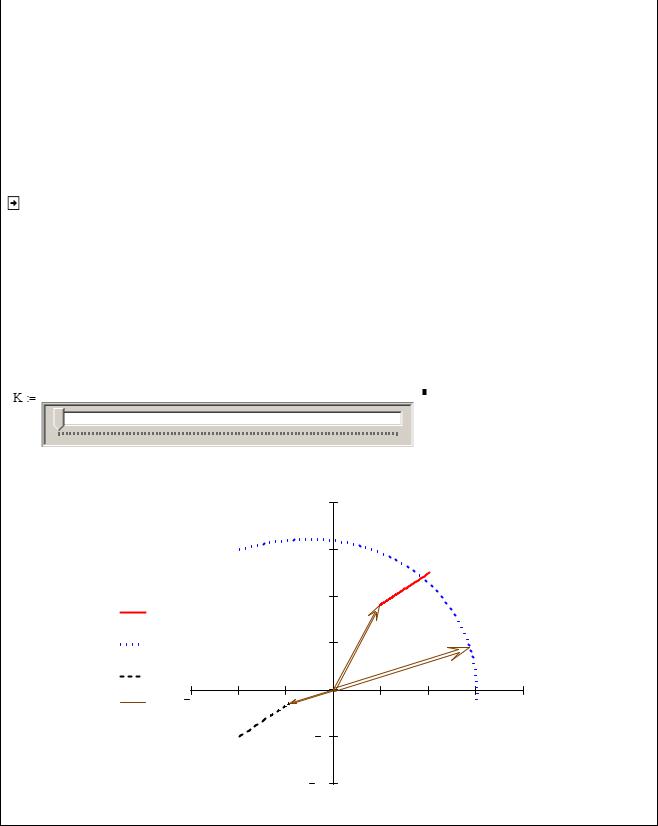
Используя элемент управления Slider , можно изобразить найденные величины при любом
значении угла α. Наличие символа " " рядом с переменными K и α′, свидетельствует об установленной, с помощью контекстного меню, опции Disable Evaluation (Отключить вы-
ражение)
α := 0, |
π |
|
.. π |
α' := |
π |
K |
|
|
α' |
= 72.412 |
|
|
* |
||||||||||
|
|
|
deg |
||||||||
180 |
2 |
180 |
|
|
|||||||
|
|
|
|||||||||
20
15
RA(α)1 |
10 |
RB(α)1
5
RC(α)1
Ry(α')
15 |
|
10 |
|
5 |
0 |
5 |
10 |
15 |
20 |
|
|
5
10
RA(α)0,RB(α)0,RC(α)0,Rx(α')
Таким образом, в задаче определены реакции связи и область существования решений уравнений равновесия. Решена задача оптимизации конструкции по одному параметру.
62
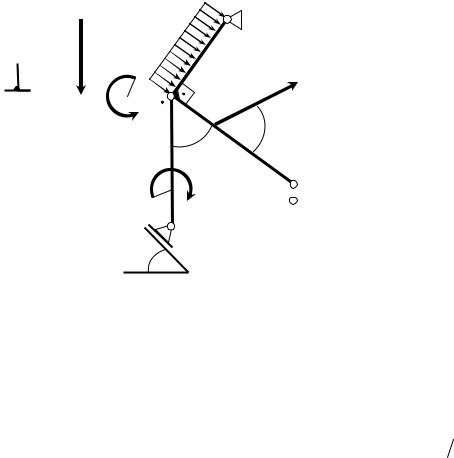
Пример 2. Равновесие трех тел
Конструкция состоит из жесткого угольника CED и двух стержней AE и BE , которые шарнирно соединены друг с другом в точке E (рис. 2.2.4). Внешними связями, наложенными на конструкцию, являются неподвижная опора, приложенная в точке D , катковая опора в точке B , невесомый стержень в точке C и скользящая заделка в точке A . Конструкция находится в равновесии под
действием пар сил с моментами M1 |
и M2 , сосредоточенных сил |
|
|
и |
|
|
|||||||||||||||||||
P1 |
|
P2 , а так- |
|||||||||||||||||||||||
же распределенной нагрузки постоянной интенсивности q . |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
q |
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
A |
|
|
L |
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
M1 |
E |
γ |
α1 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
β |
|
|
|
B |
M2 |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.2.4 Конструкция из трех звеньев |
|
|
|
|
|
|
||||||||||||||||
Найтиреакциивнешнихивнутреннихсвязейвточках A , B , C , |
D и E если |
||||||||||||||||||||||||
AE = 3 м, |
BE = 2 м, |
|
|
CE = 4 м, |
|
DE =1 м, |
|
|
|
|
|
|
|||||||||||||
AL = 2 м, |
CK = 3 м, |
|
|
α = π6 , |
|
|
β = π4 , |
γ = π3 , |
|||||||||||||||||
M1 =10 кН м, |
M2 =10 кН м, P1 = 20 кН, |
|
P2 = 20 кН, |
q = 5 кН м. |
|||||||||||||||||||||
Определить условия, при которых конструкция находится в равновесии. Указать области значений внутренних параметров конструкции, внутри которых модули реакции связей не превышают значение Fпр =100 кН .
63
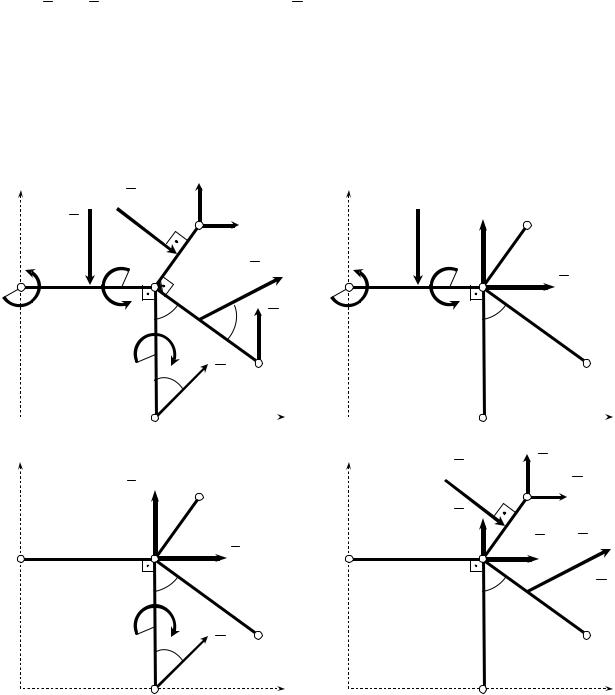
Решение
Проведем координатные оси xOy (рис. 2.2.5 а) и изобразим на схеме,
действующие на конструкцию внешние силы: пары сил с моментами M1 и M2 ,
силы P1 и P2 , равнодействующую Q от действия распределенной нагрузки
(Q = q a) постоянной интенсивности q , приложенную в точке N , а также реак-
ции внешних связей. Для нахождения реакций внешних и внутренних связей расчленим конструкцию и рассмотрим равновесие каждой ее части отдельно
(рис. 2.2.5 б, в, г):
y |
Q |
|
|
P2 |
|
MA |
E |
N |
A |
|
|
|
L |
|
M1 γ
|
Y |
D |
y |
|
|
|
|
||||
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
Y |
|
|||
|
|
|
P2 |
|
E 1 |
|
|||||
D |
|
|
D |
||||||||
|
|
|
|
|
|
||||||
|
P1 |
A |
MA |
E |
|
|
|
XE 1 |
|||
K α |
|
L |
|
||
|
RC |
|
γ |
||
|
M1 |
|
|
M2 |
RB |
C |
|
|
C |
|
|
|
|
|||
O a ) |
|
β |
x |
O б) |
|
x |
|
B |
B |
y |
y |
YE 2
D
A |
E |
XE 2 |
A |
|
γ
Q YD
XD
YE 3 |
|
D |
|
|
N |
XE 3 |
P1 |
||
E |
γ K α
 RC
RC
M2 |
RB |
C |
|
|
C |
||
|
|
|
|
||||
O в) |
|
β |
x |
O г ) |
|
x |
|
|
B |
B |
|||||
|
Рис. 2.2.5 Расчетные схемы узлов конструкции. |
|
|||||
Стержень |
AE (рис. 2.2.5 б). Изобразим действующие на стержень силы: |
||||||
пару сил с моментом M1 , силу |
|
|
и реакции связей. Реакцию скользящей за- |
||||
P2 |
|||||||
64

делки A изображаем парой сил с моментом M A , а реакции шарнира E изобра-
жаем двумя составляющими: X E1 , YE1 .
Стержень BE (рис. 2.2.5 в). Изобразим действующие на стержень силы:
пару сил с моментом M2 и реакции связей. Реакцию RB катковой опоры B на-
правим перпендикулярно опорной плоскости, а реакции шарнира E изобража-
ем двумя составляющими: X E 2 , YE 2 .
Угольник DEC (рис. 2.2.5 г). Изобразим действующие на угольник силы:
равнодействующую |
|
|
|
|
|
|
, приложенную в |
точке |
|||||||
|
распределенной нагрузки Q |
||||||||||||||
N EN = 1 DE , силу |
|
|
и реакции связей. Реакции неподвижной опоры |
D и |
|||||||||||
P |
|||||||||||||||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D , |
|
|
|
|
|
|
|
|
|
||||
шарнира E изобразим двумя составляющими: X |
YD и X E 3 , YE 3 , а усилие RC в |
||||||||||||||
стержне C направим вдоль его оси. |
|
|
|
|
|
|
|
|
|
|
|||||
Все звенья механической системы: стержень |
|
AE , стержень BE и уголь- |
|||||||||||||
ник DEC находятся в равновесии под действием произвольной плоской системы сил и для каждого из них можно записать по три независимых уравнений равновесия, например
AE, BE, CED : ∑Fkx = 0, |
∑Fky = 0, |
∑M E (Fk )= 0. |
k |
k |
k |
Таким образом, общее число независимых уравнений равновесия равно девяти. Число неизвестных величин, в девяти уравнениях — одиннадцать (реакции
M A , RB , RC , X D , YD , X E 1 , YE1 , X E 2 , YE 2 , X E 3 , YE 3 ).
Учтем, что шарнирE , в котором соединены звенья конструкции, ненагружен, т.е., согласно аксиоме о равенстве действия и противодействия, должно выполняться равенство
RE 1 + RE 2 + RE 3 = 0,
которое в проекциях на оси координат примет вид
65
Е: ∑Fkx = 0; X E 1 + X E 2 + X E 3 = 0,
k
∑Fky = 0; YE 1 +YE 2 +YE 3 = 0. k
Окончательно имеем одиннадцать уравнений и столько же неизвестных реакций. Задача является статически определимой.
Формируем активные силы, действующие на конструкцию
|
|
|
P1 sin(α + γ) |
|
|
|
|
|
|
0 |
|
|
|
|
Q sin(γ) |
|
|
0 |
|
|
|
0 |
|
||||||||
P1 := |
− |
|
cos |
(α + γ) |
|
P2 := |
|
−P |
|
|
F := |
− |
|
(γ) |
M1 := |
|
0 |
|
M2 := |
|
0 |
|
|||||||||
|
|
|
|
P1 |
|
|
|
|
|
|
|
2 |
|
Q |
|
|
Q cos |
|
|
|
|
|
−M |
||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
M |
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||
Формируем выражения для реакций связей |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
Rb sin(β) |
|
|
|
0 |
|
|
|
Xd |
|
|
|
|
||||||||
M |
A |
:= |
|
0 |
|
|
|
R |
:= Rb cos (β) |
R |
:= |
Rc |
|
|
R := |
|
Yd |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
C |
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
Ma |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
||||
|
|
|
Xe1 |
|
|
|
|
|
|
Xe2 |
|
|
Xe3 |
|
|
|
|
|
|
|
|
|
|
||||||||
R |
|
:= |
|
Ye1 |
|
|
R |
|
:= |
|
Ye2 |
|
R |
:= |
Ye3 |
|
|
|
|
|
|
|
|
|
|
|
|||||
E1 |
|
|
|
|
|
|
|
E2 |
|
|
|
|
|
|
E3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
Определяем радиус-векторы точек приложения действующих внешних сил.
|
0 |
|
|
|
|
AE |
|
|
|
|
|
|
AE |
|
|
|
|
|
AL |
|
|
|
||||||||
r |
:= BE |
|
|
|
|
r |
:= |
0 |
|
|
|
|
r |
:= |
BE |
|
|
|
|
|
r |
:= BE |
|
|
|
|
||||
A |
|
|
|
|
|
B |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
||
|
0 |
|
ED cos (γ) |
|
|
0 |
|
|
(γ) |
|
|
|
0 |
|
|
|
(γ) |
|
|
0 |
|
|
(γ) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ED cos |
|
|
|
|
|
|
EK sin |
|
|
|
EC sin |
|
|||||||||||
r |
:= r + |
1 |
|
|
ED sin(γ) |
r |
:= r |
+ |
ED sin(γ) |
|
r |
:= r |
+ |
|
−EK cos (γ) |
r |
:= r + |
|
−EC cos (γ) |
|||||||||||
2 |
|
|||||||||||||||||||||||||||||
Q E |
|
|
|
|
D E |
|
|
|
|
|
|
K E |
|
|
|
|
|
C E |
|
|
|
|
||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
Вычисление главного вектора |
|
AE |
и главного момента M E внешних сил, действующих на |
|||||||||||||||||||||||||||
P |
||||||||||||||||||||||||||||||
стержень AE . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xe1 |
|
|
|
|
|
|
|
|
|
PAE := P2 + RE1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ Ye1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
P |
|
→ −P |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AE |
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
MeAE := MA + (rL − rE)× P2 + M1 + (rE − rE)× RE1 MeAE → Ma −
Вычисление главного вектора PBE и главного момента M E стерженьBC .
0 |
|
0 |
|
|
|
(AL − AE) P |
+ M |
2 |
1 |
внешних сил, действующих на
Rb sin(β) + Xe2
PBE:= RB + RE2 PBE → Rb cos (β) + Ye2
0
66
|
|
|
|
|
|
|
|
|
|
0 |
|
Me |
|
:= (r − r )× R + M2 + (r − r )× R |
|
|
|
|
0 |
|
|||
BE |
Me |
BE |
→ |
|
|
||||||
|
B E |
B |
E E |
E2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
BE Rb sin(β) − M |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Вычисление главного вектора PCD и главного момента M E внешних сил, действующих на угольникCED .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P sin(α + γ) + Xe3 + Q sin(γ) + Xd |
|
||||||
PCD := RC + P1 + RE3 + FQ + RD |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
P |
|
→ Rc − P cos (α + γ) |
+ Ye3 − Q cos (γ) + Yd |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Me |
CD |
:= (r − r ) |
× R + (r − r |
) |
× P1 + (r − r |
)× R + (r − r |
)× F + |
(r − r )× R |
|
||||||||||||||||
|
|
C E |
|
C K E |
|
|
E E |
E3 Q E |
|
Q D |
E |
|
D |
|
|||||||||||
|
|
|
expand |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
MeCD |
|
simplify→ |
|
|
(γ) |
Rc |
+ |
|
|
sin |
(α) |
− |
1 |
+ |
|
|
(γ) |
Yd |
− |
|
(γ) |
|
|
||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
EC sin |
|
|
EK P |
|
|
|
ED Q |
|
ED cos |
|
|
ED sin |
|
Xd |
|
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Вычисление главного вектора внутренних сил, действующих в шарниреE .
|
|
|
|
|
|
|
|
|
|
Xe1 + Xe2 + Xe3 |
||
PE := RE1 + RE2 + RE3 |
|
PE → |
|
|
|
|||||||
|
|
Ye1 + Ye2 + Ye3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Формирование ортов |
|
, |
|
, |
|
декартовой системы координат. |
|
|
||||
i |
j |
k |
|
|
||||||||
1 |
|
0 |
|
|
0 |
|
||||||
i := 0 |
|
j := 1 |
|
|
k := |
0 |
|
|||||
|
|
|
|
|
|
|
|
|||||
0 |
|
0 |
|
|
|
1 |
|
|||||
Формируем и вычисляем левую часть уравнений равновесия
EQ := (PAE i PBE i PCD i PE i PAE j PBE j PCD j PE j MeAE k MeBE k MeCD k)T
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xe1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rb sin(β) + Xe2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
P1 sin(α) cos (γ) + P1 cos (α) sin(γ) + Xe3 + Q sin(γ) + Xd |
|
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xe1 + Xe2 + Xe3 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
−P2 + Ye1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
expand |
|
|
|
|
|
|
|
|
|
|
|
Rb cos (β) + Ye2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
EQ |
simplify→ |
Rc − P |
|
cos (α) cos (γ) + P sin(α) sin(γ) |
+ Ye3 − Q cos (γ) + Yd |
|
|||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ye1 + Ye2 + Ye3 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Ma − P2 AL + P2 AE + M1 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
BE Rb sin(β) − M2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
(γ) |
|
|
+ |
|
|
|
|
(α) − 1 |
+ |
|
|
(γ) |
|
− |
|
( |
γ) |
|
||
|
|
EC sin |
|
Rc |
|
EK P |
|
sin |
|
|
ED Q |
|
ED cos |
|
Yd |
|
ED sin |
|
|
Xd |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
67

Вводим исходные данные для расчета
AE := 2 |
BE:= 1 |
AL := 1 |
ED := 3 |
EC:= 4 |
EK := 1 |
α := |
π |
β := |
π |
γ := |
π |
|
|
|
|
|
|
|
6 |
|
4 |
|
3 |
M1 := 15 |
M2 := 20 |
P1 := 10 |
P2 := 30 |
q := 5 |
|
|
|
|
|
|
|
Задаем начальное приближение для неизвестных реакций.
Ma |
0 |
||||
|
Rb |
|
|
0 |
|
|
|
|
|
|
|
|
Rc |
|
0 |
|
|
|
Xd |
|
|
0 |
|
|
Yd |
|
|
0 |
|
|
|
|
|
||
Xe1 |
:= 0 |
||||
|
Ye1 |
|
|
0 |
|
|
Xe2 |
|
|
0 |
|
|
|
|
|
||
|
Ye2 |
|
|
0 |
|
|
Xe3 |
|
|
0 |
|
|
|
|
|
|
|
|
Ye3 |
|
0 |
||
Given
Вычисляем равнодействующую Q распределенной нагрузки, постоянной интенсивностиq .
Q := q ED * |
Q = 15 |
Задаем начало блока решений системы уравнений "Given", и формируем систему уравнений равновесия с помощью операций копирования и вставки.
|
|
|
|
|
|
|
|
|
|
|
Xe1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Rb sin(β) + Xe2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
P1 sin(α) cos (γ) + P1 cos (α) sin(γ) + Xe3 + Q sin(γ) + Xd |
|
||||||||||||||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Xe1 + Xe2 + Xe3 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
−P2 + Ye1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Rb cos (β) + Ye2 |
|
|
|
|
|
|
|
|
||||||
|
Rc |
− P |
cos (α) cos (γ) + P sin(α) sin(γ) |
+ Ye3 − Q cos (γ) + Yd |
|
|
0 |
||||||||||||||||
|
|||||||||||||||||||||||
|
|||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Ye1 + Ye2 + Ye3 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Ma − P2 AL + P2 AE + M1 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
BE Rb sin(β) − M2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
(γ) |
|
+ |
|
|
|
|
(α) − 1 |
+ |
|
|
(γ) |
|
− |
|
( |
γ) |
|
||||
EC sin |
|
Rc |
|
EK P |
|
sin |
|
|
ED Q |
|
ED cos |
|
Yd |
|
ED sin |
|
|
Xd |
|||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
Ma |
Ma |
||||
|
Rb |
|
|
Rb |
|
|
|
|
|
|
|
|
Rc |
|
Rc |
||
|
Xd |
|
|
Xd |
|
|
Yd |
|
|
Yd |
|
|
|
|
|
||
Xe1 |
:= Find Xe1 |
||||
|
Ye1 |
|
|
Ye1 |
|
|
Xe2 |
|
|
Xe2 |
|
|
|
|
|
||
Ye2 |
Ye2 |
||||
|
Xe3 |
|
|
Xe3 |
|
|
|
|
|
|
|
|
Ye3 |
|
Ye3 |
||
Ma |
|
|
|
|
||
|
|
0 |
||||
|
Rb |
|
|
|
|
|
|
0 |
-45 |
||||
|
|
|
||||
Rc |
|
1 |
28.284 |
|||
|
|
|
||||
|
Xd |
|
|
2 |
-61.322 |
|
|
Yd |
|
|
3 |
-42.99 |
|
|
|
|
|
|
||
|
4 |
78.822 |
||||
Xe1 |
|
= |
||||
5 |
0 |
|||||
|
Ye1 |
|
|
|||
|
|
|
6 |
30 |
||
Xe2 |
|
|||||
|
|
|
|
|
||
|
7 |
-20 |
||||
|
Ye2 |
|
|
|
|
|
|
8 |
-20 |
||||
|
Xe3 |
|
|
|
|
|
|
9 |
20 |
||||
|
|
|
||||
Ye3 |
|
|
10 |
-10 |
||
Вычисляем неизвестные реакции связей с помощью процедурыFind , которая указывает окончание блока решения системы уравнений.
68

Формируем векторы реакций внешних и внутренних связей, действующих на конструкцию. Вычисляем модули реакций и их ориентацию относительно декартовой системы координат.
|
|
0 |
|
|
|
|
|
|
|
|
|
|
M |
A |
|
|
|
|
|
|
|
− 1 |
|||||||||
MA := |
|
0 |
|
|
|
αA := acos |
|
|
|
|
|
|
|
|
|
|
deg |
||||||||||||||
|
|
|
|
|
|
|
|
|
MA |
|
|
|
|
|
|||||||||||||||||
|
Ma |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Rb sin(β) |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
R := |
|
|
|
|
(β) |
α |
|
:= acos |
|
|
|
|
|
|
|
|
B |
|
|
|
|
deg− 1 |
|||||||||
|
|
B |
|
|
|
|
R |
|
|
|
|
||||||||||||||||||||
B |
Rb cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1 |
||||||||||||||
RC := |
|
|
|
αC := acos |
|
|
|
|
|
|
|
C |
deg |
||||||||||||||||||
Rc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Xd |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1 |
|||||||||||||
RD := |
|
|
|
αD := acos |
|
|
|
|
|
D |
|
deg |
|||||||||||||||||||
Yd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
R |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Xe1 |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1 |
||||||||||
RE1 := |
Ye1 |
|
αE1 |
:= acos |
|
|
|
|
E1 |
|
deg |
||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
E1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Xe2 |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1 |
||||||||||
RE2 := |
Ye2 |
|
αE2 |
:= acos |
|
|
|
|
E2 |
|
deg |
||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
E2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Xe3 |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 1 |
||||||||||
RE3 := |
Ye3 |
|
αE3 |
:= acos |
|
|
|
|
E3 |
|
deg |
||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
E3 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
|
|
|
|
90 |
|
MA = |
|
0 |
|
|
MA |
|
= 45 |
αA = |
|
90 |
|
|
|
||||||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
−45 |
|
|
|
|
|
180 |
||||
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
45 |
|
||||
RB = |
|
|
|
|
|
RB |
|
|
|
|
= 28.284 |
αB = |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||||||
20 |
|
|
|
|
|
|
|
45 |
|
||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
||
|
|
|
|
|
|
|
|
RC |
|
|
|
= 61.322 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
RC = |
|
−61.322 |
|
|
|
|
αC = |
|
180 |
|
|||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
||
|
|
−42.99 |
|
|
|
|
|
|
|
|
|
|
|
118.609 |
|||||||
|
|
|
|
|
|
|
RD |
|
|
= 89.783 |
|
|
|
|
28.609 |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
RD = |
78.822 |
|
|
|
|
αD = |
|
|
|||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
RE1 = |
|
|
|
|
|
RE1 |
|
= 30 |
αE1 = |
|
|
|
|||||||||
|
|
|
|
|
|||||||||||||||||
|
30 |
|
|
|
|
|
0 |
|
|||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
−20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
135 |
|
||
R |
= |
|
−20 |
|
|
|
RE2 |
|
= 28.284 |
α |
E2 |
= |
|
135 |
|
||||||
|
|
|
|
||||||||||||||||||
E2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
26.565 |
||||
|
|
|
|
|
|
|
|
= 22.361 |
|
|
= 116.565 |
||||||||||
R |
= |
−10 |
|
|
RE3 |
|
α |
|
|||||||||||||
E3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
Расчет |
многозвенных конструкций с помощью блока решений |
Given − Find |
не требует знания программирования и матричной алгебры, но в |
тоже время не позволяет получить исчерпывающую информацию при исследовании найденных решений уравнений равновесия. Применение же матричных методов, особенно при решении систем линейных алгебраических уравнений, позволяет провести исследование найденных решений в полном объеме.
С другой стороны, использование матричных методов в явной форме: то есть, прямое задание матрицы коэффициентов при неизвестных величинах и вектора правой части уравнений равновесия ограничено в Mathcad системой десяти уравнении. В том случае, если число неизвестных больше десяти, необходимо применять или методы программирования, или блочную форму записи искомых матриц, с последующим применением функций объединения stack иaugment , или другие методы, вытекающие из условий задачи.
69

В данной задаче систему одиннадцати линейных алгебраических уравнений можно уменьшить до девяти, применив аксиому о равенстве действия и противодействия, расчленив, например, конструкцию на две части, AEB и CED . В этом случае уравнения связей примут вид
RE 3 = −RE′ 3 = −RE 1 − RE 2 .
После этого можно использовать матричный метод решения в явном виде. Пример формирования уравнений равновесия, а затем матрицы коэффициентов и вектора правой части, представлен ниже.
……………….
Формируем выражения для реакций связей
……………….
|
Xe1 |
|
Xe2 |
|
:= −1 (R |
|
) |
||||
R |
:= |
Ye1 |
|
R |
:= |
Ye2 |
|
R |
+ R |
||
E1 |
|
|
|
E2 |
|
|
|
E3 |
E1 |
E2 |
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
………………..
Формируем и вычисляем левую часть уравнений равновесия
EQ := (PAE i |
PAE j MeAE k PBE i |
PBE j MeBE k |
PCD i PCD j |
MeCD k)T |
|
|||||||||
|
|
|
|
|
|
|
|
Xe1 |
|
|
|
|
||
|
|
|
|
|
|
−P2 + Ye1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Ma − P2 AL + P2 AE + M1 |
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
Rb sin(β) + Xe2 |
|
|
|||||||
|
expand |
|
|
|
|
|
|
|
(β) + |
Ye2 |
|
|
||
|
|
|
|
|
|
|
||||||||
|
|
|
|
Rb cos |
|
|
|
|
||||||
EQ |
→ |
|
|
|
|
|
|
(β) − |
M2 |
|
|
|||
|
simplify |
|
|
BE Rb sin |
|
|
|
|||||||
|
|
|
|
P sin(α) cos (γ) |
+ P cos (α) sin(γ) − Xe1 − Xe2 + Q sin(γ) |
|
||||||||
|
|
|
|
+ Xd |
||||||||||
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
Rc − P1 cos (α) cos |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(γ) + P1 sin(α) sin(γ) − Ye1 − Ye2 − Q cos (γ) + Yd |
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
EC sin(γ) Rc + EK P sin(α) − |
|
ED Q + ED cos (γ) |
Yd − ED sin(γ) Xd |
||||||||
|
|
|
2 |
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
Формируем матрицы коэффициентов A и вектор правых частей уравнений равновесияB .
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
||
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
|
|
|
|
|||||||||
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
0 |
sin(β) |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
|
|
|
cos (β) |
|
|
|
|
|
|
|
|
|
A(β,γ) := 0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
* |
||
|
|
BE sin(β) |
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|||
|
0 |
0 |
0 |
1 |
0 |
−1 |
0 |
−1 |
0 |
|
|
|
|
|
|||||||||
|
0 |
0 |
1 |
0 |
1 |
0 |
−1 |
0 |
−1 |
|
|
|
|
|
|||||||||
0 |
0 |
EC sin(γ) |
−ED sin(γ) |
ED cos (γ) |
0 |
0 |
0 |
0 |
|
|
|
70