

В. Д. Бертяев, Л. А. Булатов, В. В. Глаголев, В. И. Латышев, А. Г. Митяев. ЭВМ в курсе теоретической
.pdfСоздание элемента управления "Slider" для отображения механизма при различных значени- |
|||||||
ях угла поворота ведущего звена. |
|
|
|
|
|||
T := 0.5τ |
|
Задание момента времени, для которого производится расчет |
|||||
В скрытой области "Расчет механизма" содержатся все формулы математической модели |
|||||||
Расчет механизма |
|
|
|
|
|
||
mV := 10 |
|
ma := 70 |
Задаются масштабы для отображения векторов скоростей |
||||
|
и ускорений на графике. |
|
|||||
|
|
|
|
||||
В скрытой области "Формирование механизма и векторов" содержатся формулы позволяю- |
|||||||
щие отобразить механизм и векторы скоростей и ускорений на графике. |
|||||||
Форм-ние механизма и векторов |
|
|
|
|
|
||
Вывод значений угловых и линейных координат звеньев |
|
||||||
φ0(Tk) |
= 90 |
|
|
|
|
|
|
deg |
|
|
|
|
|
||
φ1(Tk) |
= |
φ2 |
(Tk) |
|
|
φ3(Tk) |
yD(Tk) = 86.591 |
deg |
349.8203 |
= 319.278 |
|
= 113.3638 |
|||
|
deg |
|
|
deg |
|
||
Отображение механизма, траекторий узловых точек, векторов скоростей и ускорений. |
|||||||
|
|
T 2 |
|
|
|
|
|
R(Tk ) |
|
|
|
|
|
|
|
YT |
|
|
|
|
|
|
|
Vy |
|
|
|
|
|
|
|
ay |
|
|
|
|
|
|
|
|
|
|
|
T |
1 |
T |
|
|
|
|
R(Tk ) |
|
|
, X , Vx, ax |
|
Результаты расчетов |
|
|
|
|
|
||
 Планы скоростей, ускорений
Планы скоростей, ускорений
41
Расчет механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ORIGIN := 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задание закона движения ведущего звена ОА |
|
|
φ0(t) := φo + ωo t |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Вычисление вспомогательных величин |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
2 |
|
|
− β) |
|
|
|
|
|
|
||
β := atan |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
a |
|
|
|
|
O1A(t) := |
|
a |
|
+ b |
+ OA |
|
|
− 2 OA |
a + b cos(φ0(t) |
|
|
|
|
|
|
|||||||||||||||||||||
α (t) := angle |
( |
OA cos |
φ |
0 |
(t) |
) |
− a ,OA sin |
( |
φ |
0 |
(t) |
) |
− b |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Вычисление угловых и линейных координат ведомых звеньев |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
− O1A(t) |
2 |
|
|
|
|
|
|
|
|
|
|
O1A(t) |
2 |
2 |
|
|
2 |
|
||||||||
φ1(t) := α (t) + acos |
O1B |
− AB |
|
|
|
|
|
|
|
φ2(t) := α (t) + acos |
|
+ O1B − AB |
|
|
|||||||||||||||||||||||||||
|
|
|
|
2 O1A(t) AB |
|
|
|
|
|
|
|
|
2 O1A(t) O1B |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
φ3(t) := acos |
|
− |
O1C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yD(t) := b + O1C sin (φ2(t)) + CD sin (φ3(t)) |
|
||||||||||||||
|
|
CD |
cos(φ2(t)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Задание рассчитываемого момента времени |
|
|
|
Tk := T |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Вычисление вспомогательных угловых координат |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
φ0(t) |
|
|
|
|
|
|
|
|
ψ1(t) |
:= φ1(t) − 2π |
|
|
|
|
|
|
ψ2(t) := φ2 |
(t) − 2π |
ψ3(t) := φ3(t) − |
π |
|
|
|
||||||||||||||||||
φ (t) := |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||||||||||
deg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задание векторов определяющих положение узловых точек на плоскости |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
OA cos(φ0(t)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
AM cos(φ1(t)) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin (φ1(t)) |
|
|
|
|||
RA(t) := OA sin (φ0(t)) |
|
|
|
|
|
|
|
RO1(t) := b |
|
|
|
|
|
|
ρAM(t) := AM |
|
|
|
|||||||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
(t)) |
|
|
|
|
|
|
|
|
|
|
||||||||
O1B cos |
(φ2(t)) |
|
|
|
|
|
|
|
|
|
|
O1C cos(φ2 |
|
|
|
|
AB cos(φ1(t)) |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin (φ2 |
(t)) |
|
|
|
|
|
|
|
|
|
|
|
||
ρB(t) := O1B sin (φ2(t)) |
|
|
|
|
|
ρC(t) := O1C |
|
|
|
ρAB(t) := AB sin (φ1(t)) |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
(φ3(t)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
CK cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
CD cos(φ3(t)) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ρCK(t) := CK sin (φ3(t)) |
|
|
|
|
|
RD(t) := yD(t) |
|
|
|
|
ρCD(t) := CD sin (φ3(t)) |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
RB(t) := RO1(t) + ρB(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC(t) := RO1(t) + ρC(t) |
|
|
|
|
|
|
|
||||||||||||
RM(t) := RA(t) + ρAM(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RK(t) := RC(t) + ρCK(t) |
|
|
|
|
|
|
|
||||||||||||
Формирование массива данных для отображения траекторий узловых точек механизма |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Rt(t) := stack R |
(t)T ,R |
M |
(t)T ,R |
|
|
(t)T |
,R (t)T ,R (t)T ,R |
(t)T |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
B |
|
|
C |
|
|
|
|
|
|
K |
D |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
i := 1 .. 73 |
|
|
tti |
:= 0.5 (i − 1) |
|
|
|
|
X i |
:= Rt(tti) 1 |
Y i |
:= Rt(tti)2 |
|
|
|
|
|
|
|
||||||||||||||||||||||
Формирование матрицы коэффициентов и вектора правых частей для определения угловых |
|
||||||||||||||||||||||||||||||||||||||||
и линейных скоростей звеньев механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
−AB sin (φ1(t)) |
|
|
O1B |
sin (φ2(t)) |
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
OA sin (φ0(t)) ωo |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
AB cos(φ1(t)) |
|
|
−O1B cos(φ2(t)) |
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
−OA |
cos(φ0(t)) ωo |
|
||||||||||||||||||||||
A(t) := |
|
0 |
|
|
|
|
|
|
−O1C sin (φ2(t)) |
|
|
|
−CD sin (φ3(t)) |
0 |
|
B(t) := |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
O1C |
cos(φ2(t)) CD cos(φ3(t)) |
|
−1 |
|
|
|
|
0 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
ω(t) := A(t)− 1 B(t) |
|
|
|
|
Вычисление угловых и линейных скоростей звеньев механизма |
|
|
|
|
||||||||||||||||||||||||||||||||
42 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формирование векторов скоростей звеньев механизма |
|
|
|
|
|||||
0 |
|
0 |
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
ω0(t) := 0 |
|
ω1(t) := 0 |
|
ω2(t) := 0 |
|
ω3(t) := 0 |
|
VD(t) := ω(t)4 |
|
|
|
|
|
|
|
|
|
|
|
ωo |
ω(t)1 |
ω(t)2 |
ω(t)3 |
0 |
|
||||
Вычисление скоростей узловых точек механизма
VA(t) := ω0(t) × RA(t)
VB(t) := ω2(t) × ρB(t)
VC(t) := ω2(t) × ρC(t)
VK(t) := VC(t) + ω3(t) × ρCK(t)
VM(t) := VA(t) + ω1(t) × ρAM(t)
VBτ(t) := VB(t) tau(RB ,t , 1)
VKτ(t) := VK(t) tau(RK ,t , 1)
Формирование матрицы коэффициентов и вектора правых частей для определения угловых и линейных ускорений звеньев механизма
OA cos(φ |
0(t)) ωo2 + AB cos(φ1(t)) (ω(t)1)2 − O1B cos(φ2(t)) (ω(t)2)2 |
|
|
|
||||||||||
|
|
0(t)) ωo2 + AB sin (φ1(t)) (ω(t)1)2 − O1B sin (φ2(t)) (ω(t)2)2 |
|
|
|
|
||||||||
OA sin (φ |
|
|
|
|
||||||||||
C(t) := |
|
O1C cos(φ2(t)) (ω(t)2)2 + CD cos(φ3(t)) (ω(t)3)2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
|
O1C sin (φ2(t)) (ω(t)2) |
2 |
+ CD sin (φ3 |
(t)) (ω(t)3) |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
ε(t) := A(t)− 1 C(t) |
Вычисление угловых и линейных ускорений звеньев механизма |
|||||||||||||
Формирование векторов ускорений звеньев механизма |
|
|
|
|
|
|
||||||||
0 |
0 |
|
|
0 |
|
0 |
|
0 |
||||||
ε0(t) := 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε1(t) := 0 |
|
ε2(t) := 0 |
|
ε3(t) := 0 |
|
a (t) := ε(t) |
4 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
0 |
|
|
|
|
|
|||||||||
ε(t)1 |
|
|
|
ε(t)2 |
|
|
ε(t)3 |
|
|
0 |
|
|
||
Вычисление ускорений узловых точек механизма aA(t) := ε0(t) × RA(t) + ω0(t) × (ω0(t) × RA(t))
aM(t) := aA(t) + ε1(t) × ρAM(t) + ω1(t) × (ω1(t) × ρAM(t)) aB(t) := ε2(t) × ρB(t) + ω2(t) × (ω2(t) × ρB(t))
aC(t) := ε2(t) × ρC(t) + ω2(t) × (ω2(t) × ρC(t))
aK(t) := aC(t) + ε3(t) × ρCK(t) + ω3(t) × (ω3(t) × ρCK(t))
 Расчет механизма
Расчет механизма
Рис. 2.1.8 Содержание скрытой области "Расчет механизма" при аналитическом решении поставленной задачи.
 Форм-ние механизма и векторов
Форм-ние механизма и векторов
Формирование векторов скоростей узловых точек для их отображения на графике с использованием функции пользователя, вычисляющей координаты шаблона вектора, рисуемого по 7 базовым точкам.
va(t) := vector7 (RA(t)1 ,RA(t)2 ,VA(t)1 ,VA(t)2 ,mV) vm (t) := vector7 (RM(t)1 ,RM(t)2 ,VM(t)1 ,VM(t)2 ,mV) vb(t) := vector7 (RB(t)1 ,RB(t)2 ,VB(t)1 ,VB(t)2 ,mV) vc(t) := vector7 (RC(t)1 ,RC(t)2 ,VC(t)1 ,VC(t)2 ,mV) vk (t) := vector7 (RK(t)1 ,RK(t)2 ,VK(t)1 ,VK(t)2 ,mV)
vd(t) := vector7 (RD(t)1 ,RD(t)2 ,VD(t)1 ,VD(t)2 ,mV)
43
Формирование массива данных для отображения векторов скоростей на графике |
|
||||||||||||||||||||
Vx := augment |
v |
|
(Tk) 1 |
,v |
(Tk) 1 |
,v |
(Tk) 1 |
,v |
(Tk) 1 |
,v |
(Tk) 1 |
,v |
(Tk) 1 |
|
|
||||||
|
|
|
|
|
a |
|
b |
|
c |
|
m |
|
k |
|
d |
|
|
|
|
||
Vy := augment |
v |
|
(Tk) 2 |
,v |
(Tk) 2 |
,v |
(Tk) 2 |
,v |
(Tk) 2 |
,v |
(Tk) 2 |
,v |
(Tk) 2 |
|
|
||||||
|
|
|
|
|
a |
|
b |
|
c |
|
m |
|
k |
|
d |
|
|
|
|
||
Формирование векторов ускорений узловых точек для их отображения на графике с исполь- |
|||||||||||||||||||||
зованием функции пользователя, вычисляющей координаты шаблона вектора, рисуемого по |
|||||||||||||||||||||
5 базовым точкам. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
aa(t) := vector5 (RA(t)1 ,RA(t)2 ,aA(t)1 ,aA(t)2 ,ma) |
|
|
|
|
|
|
|
|
|||||||||||||
am (t) := vector5 (RM(t)1 ,RM(t)2 ,aM(t)1 ,aM(t)2 ,ma) |
|
|
|
|
|
|
|
||||||||||||||
ab(t) := vector5 (RB(t)1 ,RB(t)2 ,aB(t)1 ,aB(t)2 ,ma) |
|
|
|
|
|
|
|
|
|||||||||||||
ac(t) := vector5 (RC(t)1 ,RC(t)2 ,aC(t)1 ,aC(t)2 ,ma) |
|
|
|
|
|
|
|
||||||||||||||
ak (t) := vector5 (RK(t)1 ,RK(t)2 ,aK(t)1 ,aK(t)2 ,ma) |
|
|
|
|
|
|
|
|
|||||||||||||
ad(t) := vector5 (RD(t)1 ,RD(t)2 ,aD(t)1 ,aD(t)2 ,ma) |
|
|
|
|
|
|
|
||||||||||||||
Формирование массива данных для отображения векторов ускорений на графике |
|
||||||||||||||||||||
a |
:= augment |
a |
a |
(Tk) 1 |
,a |
(Tk) 1 |
,a |
c |
(Tk) 1 |
,a |
(Tk) 1 |
,a |
(Tk) 1 |
,a |
|
(Tk) 1 |
|
|
|||
x |
|
|
|
|
|
b |
|
|
m |
k |
|
d |
|
|
|
||||||
a |
:= augment |
a |
a |
(Tk) 2 |
,a |
(Tk) 2 |
,a |
c |
(Tk) 2 |
,a |
(Tk) 2 |
,a |
(Tk) 2 |
,a |
|
(Tk) 2 |
|
|
|||
y |
|
|
|
|
|
b |
|
|
m |
k |
|
d |
|
|
|
||||||
Формирование массива данных для отображения механизма на графике |
|
|
|||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R(t) := augment |
0 ,RA(t) ,RB(t) , |
RO1(t) ,RC(t) ,RD(t) |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Форм-ние механизма и векторов |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рис. 2.1.9 Содержание скрытой области "Формирование механизма и векторов" |
|||||||||||||||||||||
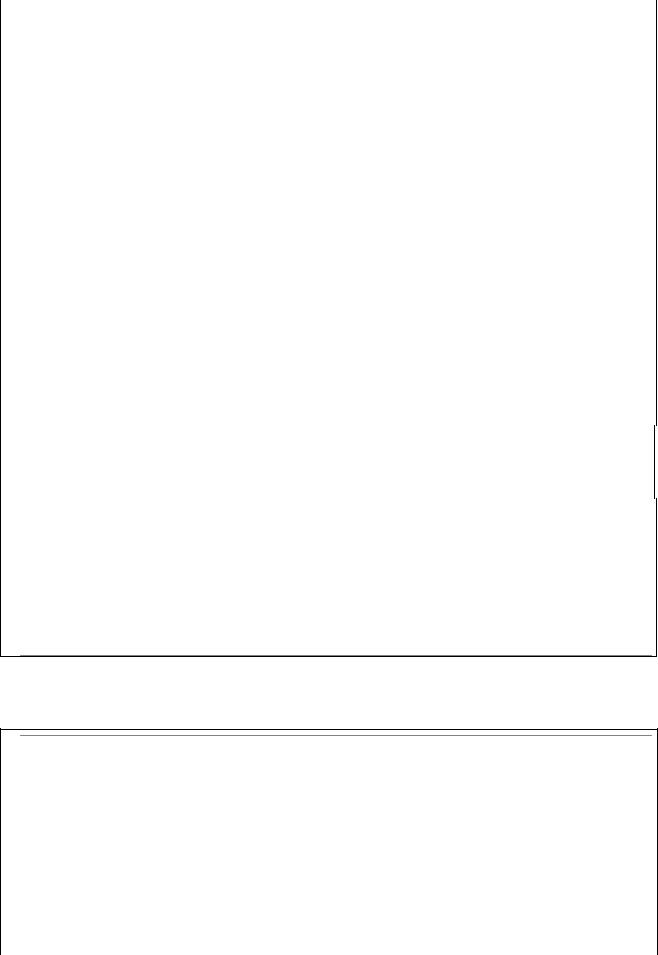
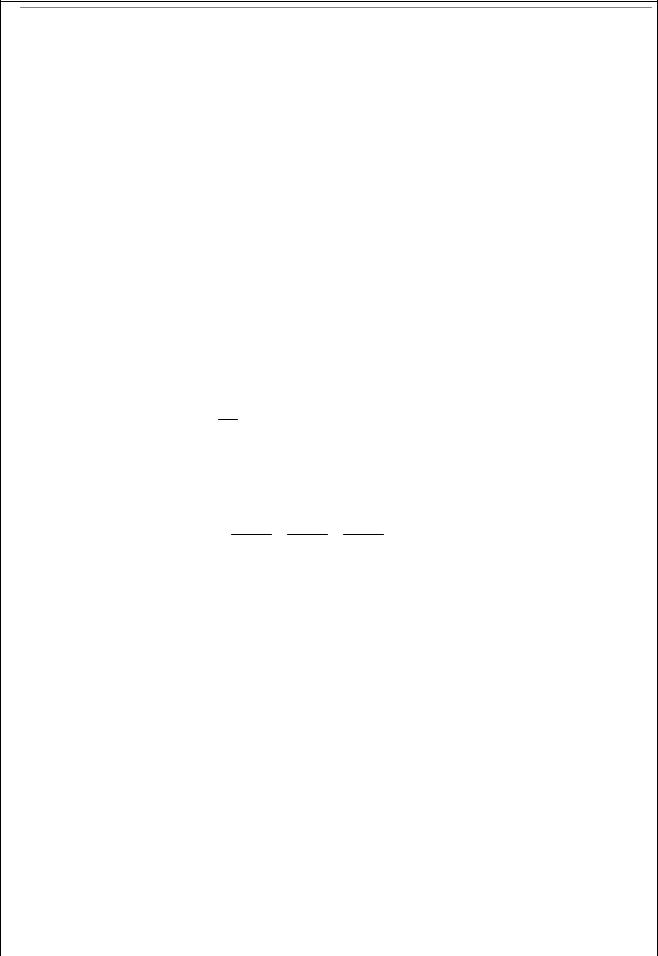
Результаты расчетов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ψ1(Tk) |
= −10.1797 |
ψ2(Tk) |
|
|
|
ψ3(Tk) |
= 23.3638 |
|
|
yD(Tk) = 86.591 |
|
||||||||||
deg |
|
|
= −40.722 |
|
deg |
|
|
|
|||||||||||||
|
|
|
|
|
|
deg |
|
|
|
|
|
|
|
|
|
|
|
||||
t := 0 ,0.5 .. 36 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
105 |
|
|
|
|
|
|
ψ1(t) |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
deg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ2(t) |
0 |
|
|
|
90 |
180 |
270 |
|
|
360 |
|
|
95 |
|
|
|
|
|
|
||
|
|
|
|
|
|
yD(t) |
|
|
|
|
|
|
|
||||||||
|
deg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
ψ3(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
deg |
40 |
|
|
|
|
|
|
|
|
|
|
|
|
85 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
80 0 |
90 |
|
180 |
270 |
360 |
|
|
|
|
|
|
|
|
|
φ(t) |
|
|
|
|
|
|
|
|
|
|
φ(t) |
|
|
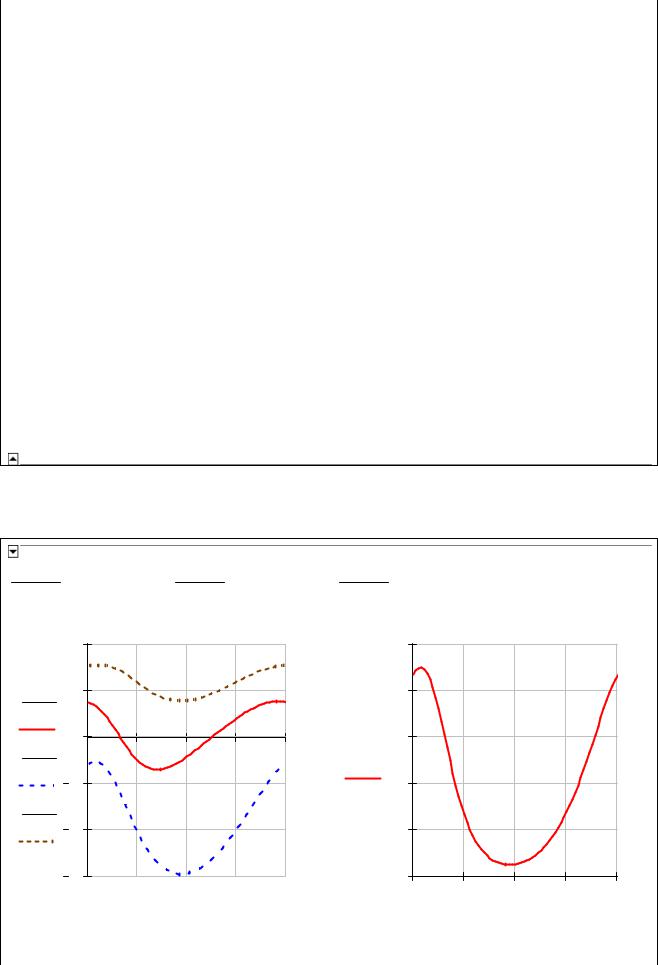
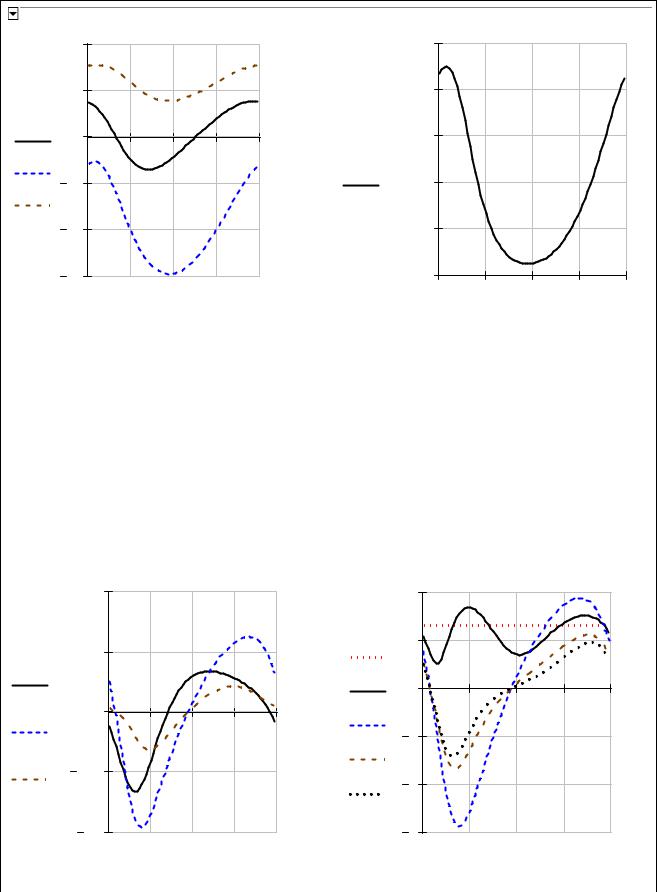
Вычисленные значения скоростей звеньев и узловых точек в момент времениt =TK . |
|
||||||||||||||||||||
ω(Tk)1 = −0.0403 |
|
|
|
|
ω(Tk)2 = −0.0845 |
|
|
ω(Tk)3 = −0.0314 |
|
|
|||||||||||
44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−2.618 |
|
−2.9168 |
−3.308 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
VA(Tk) = |
0 |
|
|
VM(Tk) = |
−1.664 |
|
VB(Tk) = |
−3.843 |
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
−2.481 |
|
|
−1.1251 |
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
VC(Tk) = |
−2.8822 |
|
VK(Tk) = −2.2965 |
|
VD(Tk) = |
−1.8105 |
|
|||
|
0 |
|
|
|
0 |
|
|
0 |
|
|
0.1 |
|
|
|
|
|
4 |
|
|
|
|
0.05 |
|
|
|
|
VM(t) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ω(t)1 |
|
|
|
|
VBτ(t) |
|
|
|
|
|
ω(t)2 |
|
|
|
|
0 |
90 |
180 |
270 |
360 |
|
90 |
180 |
270 |
360 |
|
|
|
|
|
|
|
0 |
VKτ(t) |
2 |
|
|
|
|
||||
ω(t)3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
VD(t)2 |
|
|
|
|
||
0.05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
6 |
|
|
|
|
|
|
φ(t) |
|
|
|
|
|
φ(t) |
|
|
Вычисленные значения скоростей звеньев и узловых точек в момент времени t =TK
ε(Tk)1 = 0.012 |
|
|
ε(Tk)2 = 0.0096 |
|
ε(Tk)3 = 0.0009 |
|
|||||||
|
|
0 |
|
|
|
0.0221 |
|
0.0509 |
|||||
a |
(Tk) = |
−0.4569 |
|
a |
(Tk) = |
0.051 |
|
a (Tk) = |
0.716 |
|
|||
A |
|
|
|
|
M |
|
|
|
B |
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0.0382 |
|
|
|
0.0173 |
|
|
0 |
|
||||
a |
(Tk) = |
0.537 |
|
|
a (Tk) = |
0.4774 |
|
a |
(Tk) = |
0.428 |
|
||
C |
|
|
|
|
K |
|
|
|
|
D |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0.02 |
|
|
|
|
|
2 |
|
|
|
|
|
0.01 |
|
|
|
|
aM(t) |
|
|
|
|
|
ε(t)1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aB(t) |
1 |
|
|
|
|
|
ε(t)2 |
0 |
90 |
180 |
270 |
360 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
aK(t) |
|
|
|
|
|
|
ε(t)3 |
0.01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aD(t)2 |
0 |
90 |
180 |
270 |
360 |
|
|
0.02 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0.03 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
φ(t) |
|
|
|
|
|
φ(t) |
|
|
Результаты расчетов |
|
|
|
|
|
|
|
|
|
||
Рис. 2.1.10 Содержание скрытой области "Результаты расчетов" при аналитическом решении поставленной задачи.
45
 Расчет механизма
Расчет механизма
Закон движения ведущего кривошипа ОА
φ0(t) := φo + ωo t
Начальное приближение для углов поворота звеньев и положения ползуна
ψ1 := 0 ψ2 := 0. ψ3 := 0 yD := 2 b
Система алгебраических уравнений относительно углов поворота звеньев и положения ползуна формируется в блоке "Given" с использованием угловых координат, изменяющихся в интервале от −π / 2 до π / 2 для звеньев 1 и 2, а также от 0 до π для звена 3.
Given
AB cos(2 π + ψ1) − O1B cos(2 π + ψ2) |
|
|
|
a − OA cos(φ0(τ)) |
|||
|
|
|
|||||
|
|
|
|||||
AB sin (2 π + ψ1) − O1B sin (2 π + ψ2) |
|
|
|
b − OA sin (φ0(τ)) |
|||
|
|
|
|||||
|
|
|
|||||
π |
|
|
|
|
|
|
|
O1C cos(2 π + ψ2) + CD cos |
+ ψ3 |
|
|
0 |
|
|
|
|
|
|
|||||
|
|||||||
2 |
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
O1C sin (2 π + ψ2) + CD sin |
+ ψ3 |
− yD |
|
−b |
|||
|
|||||||
|
|||||||
2 |
|
|
|
|
|
|
|
Решение системы уравнений с использованием функции – процедуры "Find" оформляется в виде 4-х элементного вектора, зависящего от времени.
ψ(τ) := Find (ψ1 ,ψ2 ,ψ3 ,yD)
Вычисление координат звеньев и узловых точек механизма производится для всего рассчитываемого диапазона времени от 0 до Т с шагом . Все вычисляемые величины формируют-
ся в виде одномерных ( Ψi i =1,3,φ ) или трехмерных ( R * ) матриц длиной N.
Вычисление координат всех звеньев |
|
||
i := 1 .. N |
ti := (i − 1) |
k := τ + 1 |
Задание рассчитываемого момента времени |
Вычисление угловых координат звеньев |
|
||
(φi |
|
|
Ψ3i ):= |
φ0(ti) |
||
Ψ1i |
Ψ2i |
|
|
|
||
deg |
||||||
(φOi |
φ1i |
φ2i |
φ3i ):= |
|
φi deg |
|
|
||||||
|
|
|
|
|
|
|
ψ(ti)1 ψ(ti)2 ψ(ti)3
deg deg deg
ψ(ti)1 + 2π ψ(ti)2 |
+ 2π ψ(ti)3 |
+ |
π |
|
2 |
|
|||
|
|
|
|
Определение законов движения узловых точек механизма. Углы вычисляются в радианах.
i
RD
i
RA
i
RM
i
RB
i
RC
i
RK
:= (a ψ(ti)4 0 )T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RO1 i |
:= (a b 0 )T |
|||||
:= (OA cos(φ0(ti)) |
|
OA sin (φ0(ti)) |
|
0 )T |
|
|
|
|||||||||||||||
:= R |
i |
+ AM cos |
( |
φ |
1i) |
|
AM sin |
φ |
1i) |
0 T |
|
|
||||||||||
|
A |
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
||||||
:= R |
i |
+ O1B cos |
( |
φ |
2i) |
|
O1B sin |
φ |
2i) |
0 |
T |
|
||||||||||
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|||||
:= R |
i |
+ O1C cos |
φ |
2i) |
O1C sin |
φ |
2i) |
0 |
T |
|
||||||||||||
O1 |
|
|
|
|
|
|
( |
|
|
|
|
|
( |
|
|
|
|
|||||
:= R |
i |
+ CK cos |
φ |
3i) |
|
CK sin |
( |
φ |
3i) |
|
0 T |
|
|
|
||||||||
C |
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Формирование механизма для его отображения его графике по координатам узловых точек
|
0 |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|||||||
R := augment |
0 |
,R |
k |
,R |
k |
, b ,R |
k |
,R |
k |
|
|
|
|
|
A |
|
B |
|
|
C |
|
D |
|
0 |
|
|
|
|
|
|
|||||
|
|
|
|
|
0 |
|
|
|
|
|
|
46

Формирование траекторий всех 6 узловых точек механизма для их отображения на графике в виде двух матриц X и Y размером6 × N .
|
|
|
|
T |
1 |
T |
1 |
T |
1 |
|
T |
1 |
|
T |
1 |
|
T |
1 |
|
|||
X |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
augment RA |
|
, RM |
|
, RB |
|
, RC |
|
, RK |
|
, RD |
|
|
||||||||||
|
:= |
|
T |
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Y |
|
2 |
|
2 |
|
T 2 |
T 2 |
T 2 |
T 2 |
|
||||||||||||
|
augment RA |
|
, RM |
|
, RB |
|
, RC |
|
, RK |
|
, RD |
|
|
|||||||||
Вычисление скоростей звеньев и узловых точек механизма производится для всего рассчитываемого диапазона времени от 0 до Т с шагом . Все вычисляемые величины формируются в виде трехмерных матриц длиной N.
−AB sin (φ1i)AB cos(φ1i)
Ai :=
0
0
Ωi := (Ai)− 1 Bi T
O1B sin (φ2i) −O1B cos(φ2i) −O1C sin (φ2i) O1C cos(φ2i)
0 |
0 |
|
|
|
OA sin |
φ |
Oi) |
ω |
|
|
|
|
|
|
o |
||||||
|
|
|
|
|
( |
|
|
|
||
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
−CD sin (φ3i) |
|
|
B := |
|
−OA cos(φOi)ωo |
|||||
0 |
|
i |
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|||||
CD cos(φ3i) |
|
|
|
|
|
|
|
|
|
|
−1 |
|
0 |
|
|
|
|||||
|
|
|
|
|
|
|||||
(xi yi |
zi |
di ) := Ωi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
0 |
|
0 |
0 |
|
0 |
|
0 |
|
|
||||||
|
i |
i |
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
||||||||
ω0 |
ω1 |
|
ω2 |
ω3 |
|
VD |
:= |
0 |
|
0 |
|
|
0 |
|
0 |
|
di |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωo |
|
xi |
|
yi |
|
zi |
|
0 |
|
|
|
||
V |
i |
:= ω |
i |
× R |
i |
|
|
|
|
|
|
|
V |
i |
:= V |
i |
+ ω |
i |
× |
R |
i |
− R |
i |
|||
|
A |
|
0 |
|
A |
|
|
|
|
|
|
|
|
M |
|
|
A |
|
1 |
|
|
M |
|
A |
||
V |
i |
:= ω |
i |
× |
R i − R |
|
i |
|
|
|
V |
i |
:= ω |
i × |
R |
i |
− R |
i |
|
|||||||
|
B |
|
2 |
|
|
B |
|
O1 |
|
|
|
|
C |
|
2 |
|
|
C |
|
O1 |
|
|||||
V |
i |
:= V |
i |
+ ω |
i |
× |
R |
i − R |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
K |
|
C |
|
|
3 |
|
|
K |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление проекций скоростей узловых точек механизма на положительное направление единичного вектора касательной к траектории соответствующих точек производится для всего рассчитываемого диапазона времени от 0 до Т с шагом .
Вычисляемые величины формируются в виде вектора длиной N.
Va |
|
Vm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
V |
i V |
i |
|
|
|
|
V |
i V |
|
i |
|
|
|||||
|
|
|
i |
|
|
|
|
|
A |
A |
|
|
|
|
|
M |
|
M |
|
|
|||
|
|
Vc |
|
|
|
|
i |
i |
|
|
|
i |
1 |
i |
i |
|
|
|
|
i |
|||
Vb |
i |
|
:= |
|
|
|
|
|
|
1 |
|||||||||||||
|
i |
|
|
|
|
VB |
VB |
signum VB |
VB |
|
VC |
VC signum |
VC |
VC |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
Vk |
i |
Vd |
|
|
|
|
|
|
|
|
|
1 |
|
|
T |
|
|||||||
|
|
|
|
|
|
|
i |
i |
|
|
i |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
VK |
VK |
signum VK |
VK |
|
|
VD |
|
|
|
|
|
||||
Вычисление ускорений звеньев и узловых точек механизма производится для всего рассчитываемого диапазона времени от 0 до Т с шагом . Все вычисляемые величины формируются в виде трехмерных матриц длиной N.
47

|
|
|
|
|
|
2 |
+ AB cos(φ1i) (ω13, i) |
2 |
− O1B cos(φ |
2i) (ω23, i) |
2 |
|
||||||||||||||||||||
|
OA cos(φOi)ωo |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
(φ1i) |
(ω13, i) |
2 |
− O1B sin (φ2i) (ω23, i) |
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
C := |
OA sin (φOi)ωo |
+ AB sin |
|
|
|
|
|
|||||||||||||||||||||||||
i |
|
|
O1C cos(φ2i) (ω23, i)2 + CD cos(φ3i) (ω33, i)2 |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
O1C sin (φ2i) (ω23, i) |
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
+ CD sin (φ3i) (ω33, i) |
|
|
|
|
|
|
|||||||||||||||||||||
Ei := |
(Ai)− 1 |
Ci T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(xi |
|
yi |
zi |
di ) := Ei |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε i ε i |
ε i ε |
i |
|
a |
i := |
|
0 |
0 0 0 0 |
|
|
|
|||||||||||||||||||||
|
|
|
0 |
0 0 0 d |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
2 |
|
3 |
|
|
|
D |
|
|
|
|
0 |
i |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xi |
|
yi |
zi |
0 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a i |
:= ω i |
× |
|
ω i |
× R |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
A |
0 |
|
|
0 |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
i |
|
|
|
i |
|
|
i |
|
|
|
i |
|
|
|
i |
|
|
i |
i |
|
|
||||||||
aM := aA |
+ ε1 |
× RM |
|
− RA |
|
|
|
+ ω1 |
× |
ω1 |
× RM |
− RA |
|
|
||||||||||||||||||
i |
i |
|
|
i |
|
|
|
i |
|
|
|
i |
|
|
i |
|
|
|
|
i |
|
i |
|
|
|
|
|
|||||
aB |
:= ε2 |
× |
RB |
− RO1 |
|
+ ω2 |
|
|
× ω2 |
|
× |
RB − RO1 |
|
|
|
|
|
|||||||||||||||
i |
i |
|
|
i |
|
|
|
i |
|
|
|
i |
|
i |
|
|
|
i |
|
i |
|
|
|
|
|
|||||||
aC |
:= ε2 |
× |
RC |
|
− RO1 |
+ ω2 |
|
× ω2 |
|
× |
RC |
− RO1 |
|
|
|
|
|
|||||||||||||||
i |
i |
|
|
i |
|
|
|
i |
|
|
|
i |
|
|
|
i |
|
|
i |
|
|
i |
i |
|
|
|
|
|||||
aK |
:= aC + ε |
3 |
× |
RK |
− RC |
|
+ ω3 |
× |
|
ω3 |
× |
RK |
− RC |
|
|
|
|
|||||||||||||||
Вычисление модулей ускорений узловых точек механизма производится для всего рассчитываемого диапазона времени от 0 до Т с шагом . Вычисляемые величины формируются в виде вектора длиной N.
aa |
|
am |
|
|
a |
i |
a |
i |
a |
i |
a |
|
i |
|||
i |
|
A |
A |
|
M |
|
||||||||||
|
|
|
i |
|
|
|
M |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
abi |
aci |
:= |
a |
i |
a |
i |
a |
i |
a |
i |
||||||
|
|
|
|
|
|
|
B |
|
B |
C |
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||
a |
|
|
a |
|
|
|
|
|
a |
|
|
|
||||
|
ki |
d |
|
|
a |
i |
a |
i |
T |
|
|
|
|
|||
|
|
|
|
|
|
|
K |
|
K |
|
D |
|
|
|
|
|
 Расчет механизма
Расчет механизма
Рис. 2.1.11 Содержание скрытой области "Расчет механизма" при численном решении поставленной задачи
48
|
Результаты расчета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Графики изменения координат звеньев механизма. |
|
|
105 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
20 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
Ψ1 |
|
|
|
|
|
|
|
|
|
|
|
|
95 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
90 |
180 |
270 |
360 |
|
R T |
|
|
|
|
|
|
|
|
|||
Ψ2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
Ψ3 |
|
20 |
|
|
|
|
|
|
|
D |
|
90 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
40 |
|
|
|
|
|
|
|
|
|
85 |
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
80 |
0 |
90 |
|
180 |
270 |
360 |
||
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
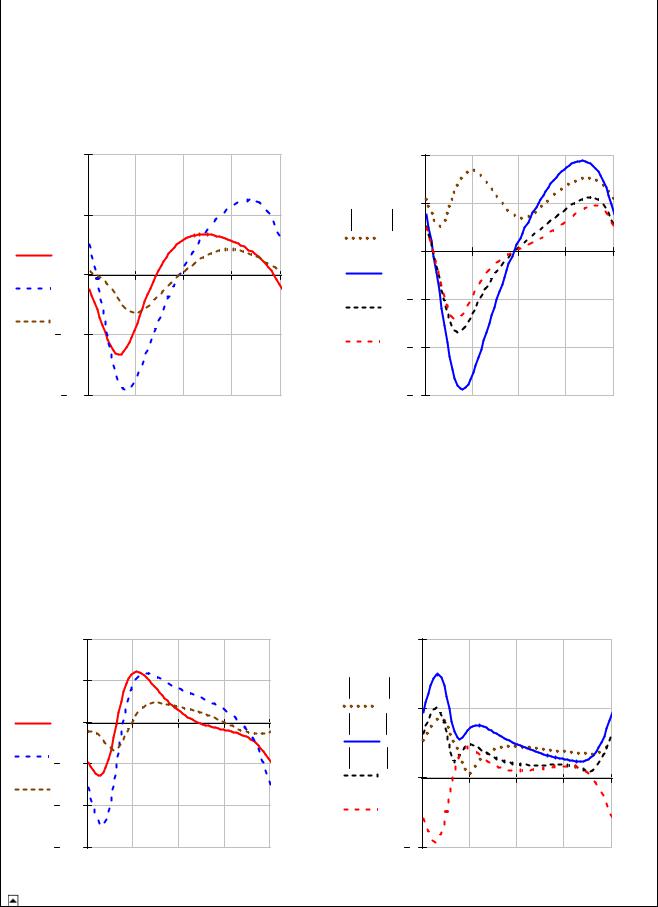
Вычисление значений скоростей узловых точек при φ = 90 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ω1 k |
= |
0 |
|
|
|
ω2 k |
= |
0 |
|
|
|
|
ω3 k |
= |
0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−0.0403 |
|
|
|
|
−0.0845 |
|
|
|
|
|
−0.0314 |
|
|
|||||
|
|
|
|
−2.618 |
|
|
|
|
−2.9168 |
|
|
|
|
|
|
−3.308 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
VA k |
= |
0 |
|
|
|
VM k |
= −1.664 |
|
|
|
|
VB k |
= |
−3.843 |
|
|
|||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
−2.481 |
|
|
|
|
−1.1251 |
|
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
VC k |
= |
−2.8822 |
|
VK k |
= −2.2965 |
|
|
|
|
VD k |
= |
−1.8105 |
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
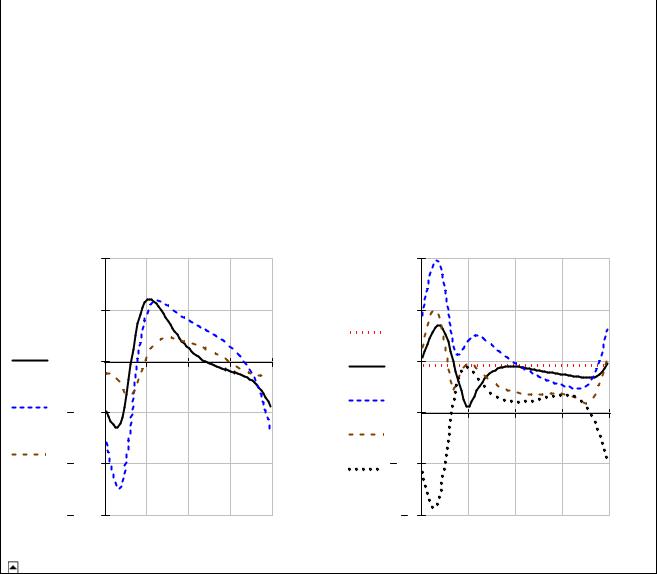
Графики изменения скоростей звеньев и узловых точек механизма. |
|
|
|
|
|
||||||||||||||||
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
3 |
0.05 |
|
|
|
|
|
|
Va |
|
2 |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
||||
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
T 3 |
|
|
|
|
|
|
|
V |
|
0 |
|
90 |
180 |
270 |
|
360 |
||||
ω2 |
|
|
0 |
|
90 |
180 |
270 |
360 |
|
b |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||
|
T |
|
|
|
|
|
|
|
|
|
Vk |
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ω3 |
|
|
0.05 |
|
|
|
|
|
|
Vd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
Вычисление ускорений звеньев при φ = 90 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ε1 k |
= |
0 |
ε2 k |
= 0 |
|
ε3 k |
= 0 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.012 |
|
|
|
0.0096 |
|
|
|
0.0009 |
||||
|
|
|
0 |
|
|
|
0.0221 |
|
|
0.0509 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
a |
k |
= |
−0.4569 |
a |
k |
= 0.051 |
|
a |
k |
= 0.716 |
|
|||
|
A |
|
|
|
|
M |
|
|
|
|
B |
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0.0382 |
|
|
0.0173 |
|
|
|
0 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
a |
k |
= |
0.537 |
a |
k |
= 0.4774 |
|
a |
k |
= 0.428 |
|
|||
|
C |
|
|
|
|
K |
|
|
|
|
D |
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Графики изменения ускорений звеньев и узловых точек механизма.
|
|
|
0.02 |
|
|
|
|
|
|
1.5 |
|
|
|
|
|
T 3 |
0.01 |
|
|
|
|
aa |
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ε1 |
|
|
|
|
|
|
am |
0.5 |
|
|
|
|
|
|
T 3 |
0 |
90 |
180 |
270 |
360 |
|
|
|
|
|
|
||
|
ab |
|
|
|
|
|
||||||||
|
ε2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.01 |
|
|
|
|
a |
k |
0 |
90 |
180 |
270 |
360 |
|
T |
3 |
|
|
|
|
|
|
||||||
|
ε3 |
|
|
|
|
|
|
ad |
|
|
|
|
|
|
|
|
|
0.02 |
|
|
|
|
0.5 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0.03 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
φ |
|
|
|
Результаты расчета |
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 2.1.12 Содержание скрытой области "Результаты расчетов" при численном решении поставленной задачи.
Приведем еще один способ построения планов скоростей и ускорений, который может быть использован и для визуализации схем рассчитываемых механизмов с большим количеством буквенных символов.
Векторы и схемы механизмов, для их визуализации, формируются матрицами одинакового размера и, следовательно, для идентичных величин можно использовать один идентификатор. Для отображаемых на графике буквенных символах используются матрицы с разным количеством строк. Для того чтобы все буквы – символы можно было обозначить одним символьным идентификатором, достаточно увеличить число строк в матрицах – идентификаторах до их
максимального количества. 50