

В. Д. Бертяев, Л. А. Булатов, В. В. Глаголев, В. И. Латышев, А. Г. Митяев. ЭВМ в курсе теоретической
.pdfДиалог с пользователем осуществляется с помощью основного и вспомогательных меню, располагаемых в правой части экрана. Элементами основного меню являются этапы алгоритма решения задачи.
Программа является контролирующей. Контроль можно проводить в трех режимах:
врежиме 1 определяются реакции всех связей данной конструкции; максимальная оценка за контрольную работу – 50 баллов;
врежиме 2 определяются только указанные реакции связей. Задание содержит одну задачу; максимальная оценка за контрольную работу – 50 баллов;
врежиме 3 задание содержит две задачи: первая решается в режиме 1, вторая – в режиме 2; максимальная оценка за контрольную работу – 100 баллов.
Режим контроля выбирается студентом самостоятельно или указывается преподавателем.
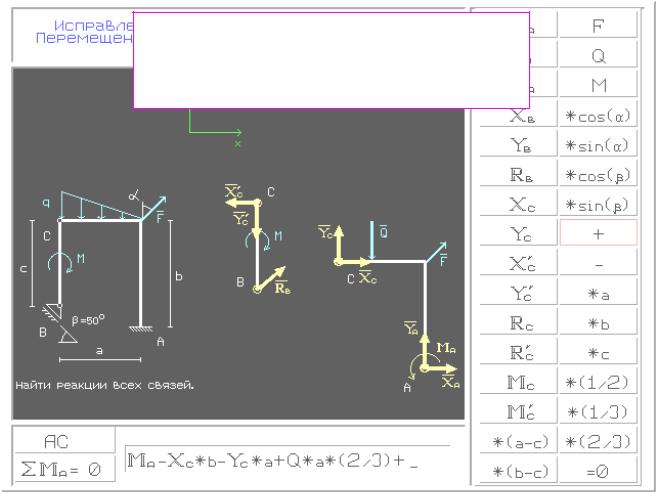
Задача решается в режиме 1. На расчетной схеме изображается составляющая
YC' реакции шарнира C. Указанный век-
тор разворачивается с помощью клавиш управления курсором в одно из возможных направлений.
Рис. 1.5
11
В режиме 1 реализованы три пути решения. В этом режиме можно:
o расчленить конструкцию на две части и рассмотреть их равновесие;
oрассмотреть равновесие конструкции в целом, освободив ее от внешних связей, и равновесие «правой» части;
oрассмотреть равновесие конструкции в целом, освободив ее от внешних связей, и равновесие «левой» части.
Врежиме 2 студент выбирает рациональный путь решения для определения указанных реакций, формируя систему уравнений равновесия, содержащую только искомые неизвестные и заданные силы.
Задача решается в режиме 1. Конструкция расчленена на два тела. На расчетных схемах изображены активные силы и реакции связей. Составляется уравнение моментов относительно точки A для тела AC.
Рис. 1.6
Программа проверяет знание типов связей, представление их реакций, знание условий равновесия плоской системы сил и умение составлять уравне-
12

ния равновесия. В режиме 2 дополнительно контролируется выбор совокупности тел и выбор составляемых уравнений.
На рис. 1.5 приведено состояние экрана в процессе построения расчетных схем: изображается реакцияYC' .
На рис. 1.6 приведено состояние экрана в процессе сборки уравнений равновесия.
Программа предоставляет студенту возможность использовать условия равновесия плоской системы сил в двух формах:
1)в форме двух уравнений проекций и одного уравнения моментов;
2)в форме двух уравнений моментов и одного уравнения проекций.
Впроцессе сборки уравнений равновесия предусмотрена возможность их просмотра и редактирования.
1.1.3.ПРОГРАММА «РАВНОВЕСИЕ ТВЁРДОГО ТЕЛА ПОД ДЕЙСТВИЕМ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ»
Программа содержит три комплекта задач:
1)Определение проекций на координатные оси силы, произвольно расположенной в пространстве, и ее моментов относительно этих осей.
2)Равновесие прямоугольной плиты.
3)Равновесие коленчатого вала.
Вкаждом комплекте содержится по 60 задач. В дальнейшем первый комплект именуется задача1, второй и третий – задача 2.
Программа имеет два режима: режим обучения и режим контроля.
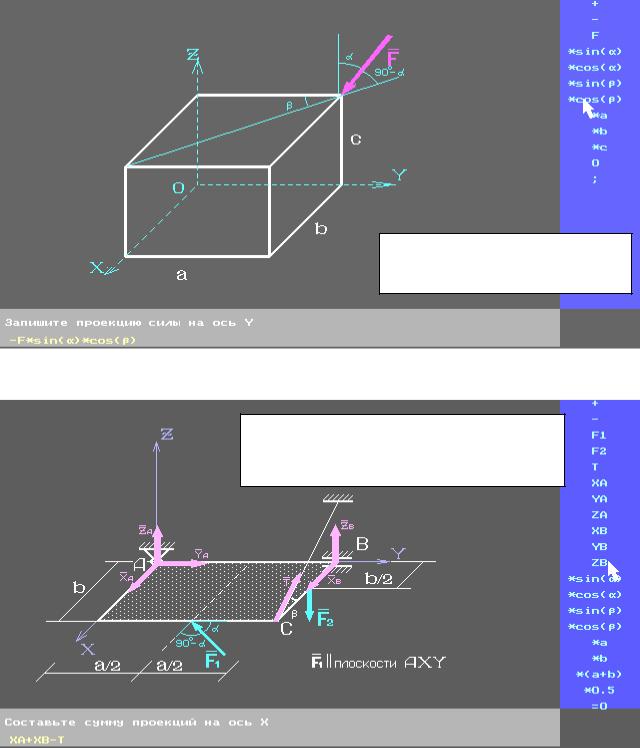
Взаимодействие с пользователем реализовано в форме «вопрос-ответ». При решении задачи 1 (рис. 1.7) студент отвечает на шесть вопросов (определяет проекции силы на координатные оси и ее моменты относительно этих осей), при решении второй задачи (рис. 1.8) – на девять вопросов, связанных с построением расчетной схемы и составлением уравнений равновесия. «Сборка»
13
уравнений осуществляется с помощью меню силовых и геометрических параметров.
Пример задачи 1. Определяется проекция силы на ось Y
Рис. 1.7
Пример задачи 2. Рассматривается равновесие плиты. Построена расчетная схема. Составляется уравнение проекций на ось X
Рис. 1.8
В режиме обучения программа контролирует действия студента по решению задач, не оценивая их в баллах. При контроле составляемых уравнений
14
выдаются сообщения об ошибках с указанием слагаемых, в которых они допущены. Количество попыток составления уравнений не ограничено.
В режиме контроля действия студента оцениваются в баллах. Контрольное задание содержит две задачи. Максимальная оценка за контрольную работу – 100 баллов.
1.2 КОНТРОЛЬНО-ОБУЧАЮЩИЕ ПРОГРАММЫ ПО КИНЕМАТИКЕ
1.2.1. ПРОГРАММА«ОПРЕДЕЛЕНИЕСКОРОСТЕЙТОЧЕКТВЕРДОГОТЕЛА ПРИПЛОСКОМДВИЖЕНИИ»
Программа содержит 60 схем плоских механизмов, имеющих по два звена, совершающих плоское движение. Эти механизмы представляют собой различные комбинации кривошипно-шатунного, кулисного и четырехзвенного механизмов.
Таблица результатов
Исходные
данные
Поле дополнительной  информации
информации
Основное меню 
Поле вопросов и ответов
Рис. 1.9
15
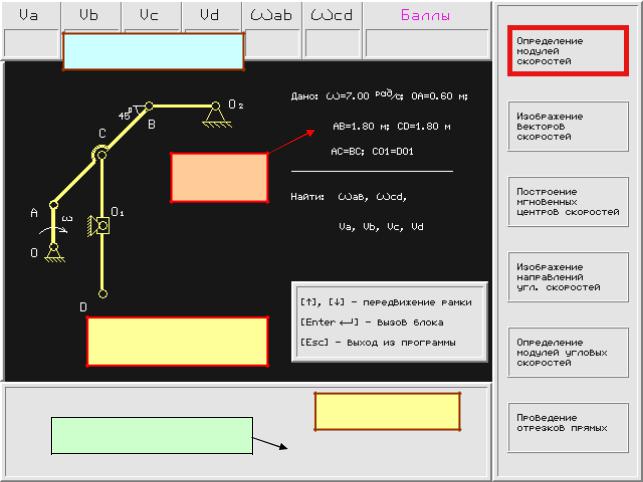
В каждом из вариантов задаются угловая скорость ведущего звена, размеры звеньев и положение механизма. Студент должен определить скорости указанных точек ведомых звеньев и угловые скорости этих звеньев, используя метод МЦС.
Программа работает только в режиме контроля. При формировании задания на экран выводятся (рис. 1.9):
o схема механизма; o исходные данные;
oтаблица результатов, в которую заносятся значения искомых величин после контроля их значений;
o основное меню;
o поле дополнительной информации; o поле вопросов и ответов.
Взаимодействие студента с программой осуществляется с помощью основного меню, состоящего из шести блоков, и некоторых вспомогательных меню. Только иногда диалог принимает форму вопроса и ответа. В последнем случае вопросы носят вспомогательный характер и служат успешному «путешествию» студента по программе. В ходе решения задачи студент имеет возможность проводить следующие графические операции:
1)Изображать скорости точек механизма.
2)Показывать направления вращения ведомых звеньев.
3)Проводить прямые линии, перпендикулярные к векторам скоростей.
4)Соединять точки отрезком прямой.
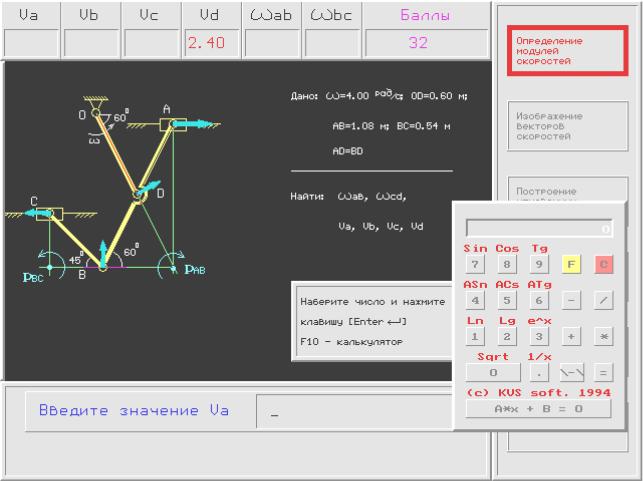
На рис. 1.10 приведено состояние экрана в процессе решения задачи: определена скорость точки D, найдены мгновенные центры скоростей звеньев АВ и ВС, определены направления скоростей точек A, B, C и направления вращения указанных звеньев, вызван калькулятор для вычисления величины скорости точки A.
16
Для проведения вычислений программа имеет встроенный калькулятор. Все действия студента по решению задачи оцениваются в баллах. Максимальная оценка за правильно решенную задачу – 50 баллов.
Рис. 1.10
В ходе решения задачи контролируются 14 действий обучающегося: студент находит мгновенные центры скоростей двух звеньев механизма, вычисляет модули угловых скоростей этих звеньев и определяет направления их вращения, а также находит скорости четырех точек, принадлежащих разным звеньям. Неправильные действия студента штрафуются начислением отрицательных баллов. Исключена возможность набора баллов путем многократного ответа на один и тот же вопрос.
17
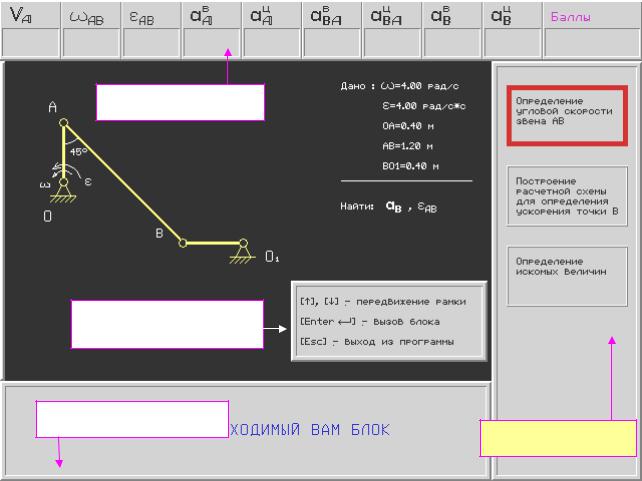
1.2.2. ПРОГРАММА «ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ТВЕРДОГО ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ»
Программа содержит 65 схем плоских механизмов, имеющих по одному звену, совершающему плоское движение: Это – четырехзвенные, кривошипношатунные и планетарные механизмы. В каждом из вариантов задаются угловая скорость и угловое ускорение ведущего звена, размеры звеньев и положение механизма. Студент должен определить ускорение точки, расположенной на звене, совершающем плоское движение, а также угловое ускорение этого звена с помощью теоремы об ускорениях точек плоской фигуры.
Таблица результатов
Поле дополнительной информации
Поле вопросов и ответов
Основное меню
Рис. 1.11
Программа работает только в режиме контроля. При формировании задания на экран выводятся (рис. 1.11):
o схема механизма; o исходные данные;
18
oтаблица результатов, в которую заносятся значения искомых величин после контроля их значений;
o основное меню;
o поле дополнительной информации; o поле вопросов и ответов.
Взаимодействие студента с программой осуществляется с помощью основного меню, состоящего из трех блоков, и некоторых вспомогательных меню. Только иногда диалог принимает форму вопроса и ответа. В ходе решения задачи студент имеет возможность проводить следующие графические операции:
1)Изображать скорости и ускорения некоторых точек механизма.
2)Показывать направления вращения и углового ускорения ведомого звена.
3)Проводить прямые линии (при отыскании МЦС).
Рис. 1.12
19
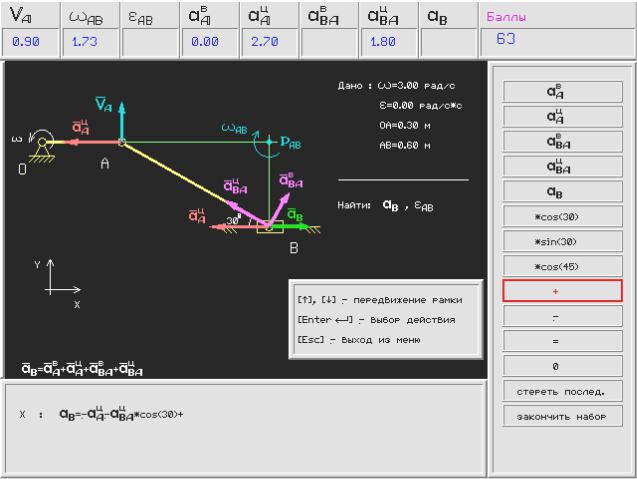
Для проведения вычислений программа имеет встроенный калькулятор. Все действия студента по решению задачи оцениваются в баллах. Максимальная оценка за правильно решенную задачу – 100 баллов.
На рис. 1.12 приведено состояние экрана в процессе решения задачи: определена скорость точки A, найден мгновенный центр скоростей звена АВ, определены величина угловой скорости звена AB и направление его вращения, построена расчетной схема для определения ускорения точки B, найдены значения некоторых ускорений, идет сборка уравнений для определения искомых величин.
Программа контролирует и оценивает до 22 действий студента. Студент должен владеть следующими навыками:
1)Уметь определять скорость и ускорение точки тела, совершающего вращательное движение вокруг неподвижной оси.
2)Находить МЦС и определять с его помощью угловую скорость звена, совершающего плоское движение, а также скорости точек этого звена.
3)Уметь применять теорему об ускорениях точек плоской фигуры для определения ускорений точек звена, совершающего плоское движение, а также его углового ускорения.
1.2.3. ПРОГРАММА «КИНЕМАТИКА СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИ»
Программа содержит 60 задач. В каждой задаче имеется тело А, вращающееся вокруг неподвижной оси по заданному закону, и точка М, движущаяся относительно тела А по известному закону. Требуется определить для указанного момента времени абсолютную скорость и абсолютное ускорение точки М. Предполагается применение теорем о сложении скоростей и ускорений.
Программа работает только в режиме контроля. После формирования задания на экран выводятся:
o рисунок к задаче;
o исходные данные; 20