

В. Д. Бертяев, Л. А. Булатов, В. В. Глаголев, В. И. Латышев, А. Г. Митяев. ЭВМ в курсе теоретической
.pdfВчастности, число строк в матрице – идентификаторе символа "В" равно
12.Остальные символы следует формировать, так как показано на рис. 2.1.13.
Было |
|
|
|
|
|
|
|
|
Стало |
|
|
|
|
|
|
|
|
|
|
|
|
|
L_M(x,y,m) := |
Ro ← |
x x x x x T |
L_M(x,y,m) := |
x x x x x x x x x x x x T |
||||||||||||||||||
y y y y y |
|
Ro ← |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
T |
|
y y y y y |
y y y y y y y |
|||||||||||||||||
|
liter ← |
0 |
0 |
2 |
4 |
4 |
|
0 |
0 |
2 |
4 |
4 |
4 |
4 |
4 |
4 |
4 |
4 |
4 |
T |
||
|
0 |
5 |
2.5 |
5 |
0 |
|
|
liter ← |
5 |
2 |
5 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
||
|
|
|
|
0 |
|
|||||||||||||||||
|
Ro + m liter |
|
|
|
|
|
Ro + m liter |
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 2.1.13 Изменение матрицы – идентификатора буквы "М".
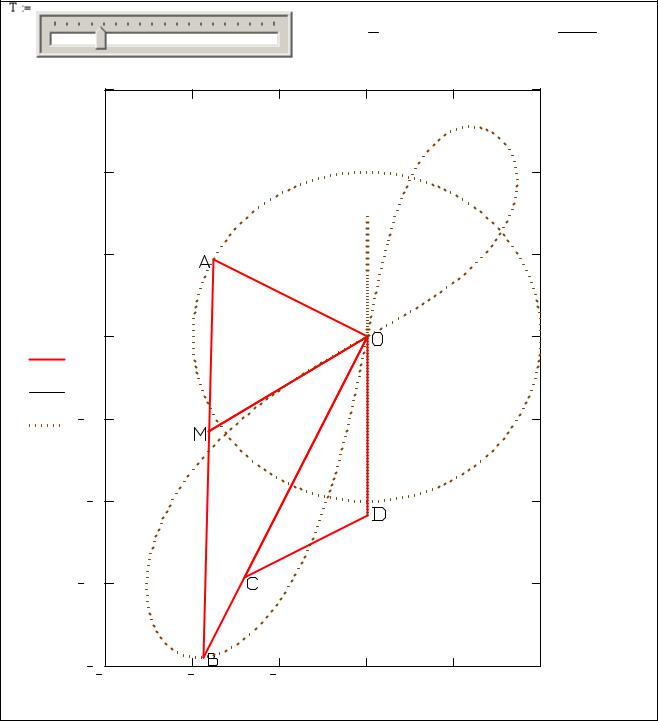
Ниже представлено содержимое скрытой области документа Mathcad "Планы скоростей, ускорений", а также результат построения этих планов.
Планы скоростей, ускорений
Задание приведенных векторов скоростей узловых точек механизма
Iv (t) := |
|
VA(t) |
|
Iv (t) := |
|
VB(t) |
|
Iv (t) := |
|
VM(t) |
|
Iv (t) := |
|
VC(t) |
|
Iv (t) := |
|
VD(t) |
|
A |
VA(t) |
|
B |
VA(t) |
|
M |
VA(t) |
|
C |
VA(t) |
|
D |
VA(t) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Формирование годографов приведенных скоростей точек механизма при построения плана скоростей
Ivx := |
for k 1 .. 361 |
Ivy := |
for k 1 .. 361 |
||||
|
|
tk ← 0.1 (k − 1) |
|
|
tk ← 0.1 (k − 1) |
||
|
|
|
IvA(tk)1 |
|
|
|
IvA(tk)2 |
|
|
|
|
|
|
|
|
|
|
x k |
← IvB(tk)1 |
|
|
y k |
← IvB(tk)2 |
|
|
|
IvD(tk)1 |
|
|
|
IvD(tk)2 |
|
xT |
|
|
yT |
|
||
Формирование буквенных идентификаторов, скоростей соответствующих точек
mV := 0.015
Ov := L_O(0.03 ,−0.05 ,mV)
Bv(t) := L_B(IvB(t)1 + 0.03 ,IvB(t)2 − 0.05 ,mV) Dv(t) := L_D(IvD(t)1 + 0.03 ,IvD(t)2 − 0.03 ,mV)
обозначающих концы векторов приведенных
Масштаб символа
Av(t) := L_A(IvA(t)1 − 0.08 ,IvA(t)2 − 0.05 ,mV) Cv(t) := L_C(IvC(t)1 + 0.02 ,IvC(t)2 − 0.075 ,mV) Mv(t) := L_M(IvM(t)1 − 0.08 ,IvM(t)2 − 0.05 ,mV)
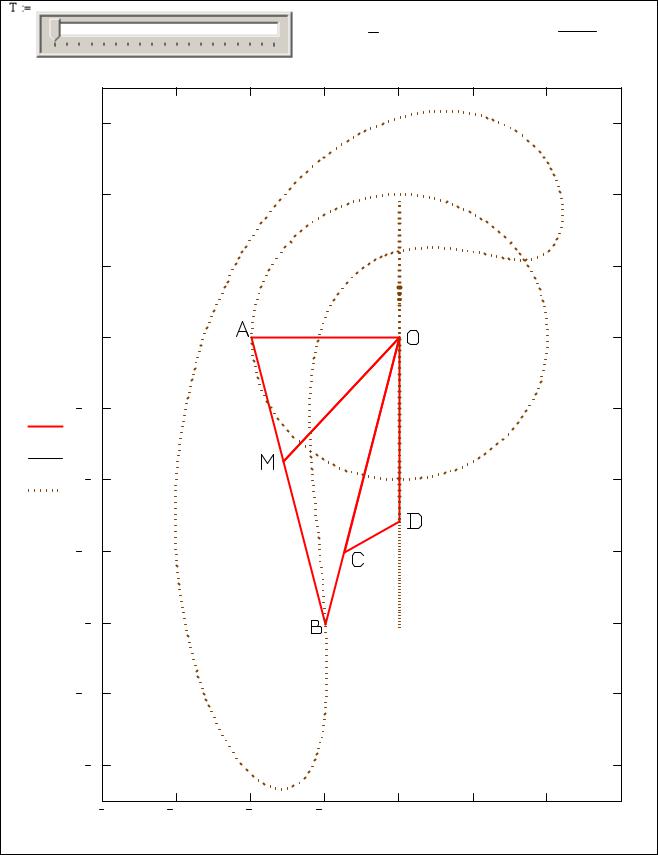
Формирование плана скоростей
Plvx(t) := augment (0 ,IvA(t)1 ,IvB(t)1 ,0 ,IvM(t)1 ,0 ,IvC(t)1 ,IvD(t)1 ,0)T
Plvy(t) := augment (0 ,IvA(t)2 ,IvB(t)2 ,0 ,IvM(t)2 ,0 ,IvC(t)2 ,IvD(t)2 ,0)T
Присвоение общего идентификатора буквенным символам на плане скоростей
Lvx(t) := augment (Av(t) 1 ,Bv(t) 1 ,Cv(t) 1 ,Dv(t) 1 ,Mv(t) 1 ,Ov 1 ) Lvy(t) := augment (Av(t) 2 ,Bv(t) 2 ,Cv(t) 2 ,Dv(t) 2 ,Mv(t) 2 ,Ov 2 )
………………………………
 Планы скоростей, ускорений
Планы скоростей, ускорений
51
Формирование плана ускорений проводится аналогично. |
|
|
||||||
|
|
|
|
T := |
T |
T = 6.2 |
φ0 |
(T) |
|
|
|
|
5 |
|
= 62 |
||
|
|
|
|
|
|
deg |
||
|
1.5 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
Plvy(T) |
0 |
|
|
|
|
|
|
|
Lvy(T) |
|
|
|
|
|
|
|
|
Ivy |
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
2 1.5 |
1 |
0.5 |
|
0 |
0.5 |
1 |
|
|
|
|
Plvx(T) , Lvx(T) , Ivx |
|
|
|
||
52 |
|
|
|
|
|
|
|
|
|
|
|
|
|
T := |
T |
T = 0 |
φ0 |
(T) |
|
|
|
|
|
5 |
|
= 0 |
||
|
|
|
|
|
|
|
deg |
||
|
1.5 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Play(T) 0.5 |
|
|
|
|
|
|
|
|
|
Lay(T) |
|
|
|
|
|
|
|
|
|
Iay |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2.5 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
1.5 |
1 |
0.5 |
|
0 |
0.5 |
1 |
1.5 |
|
|
|
|
Plax(T) , Lax(T) , Iax |
|
|
|
||
|
|
|
|
|
|
|
|
|
53 |
2.2.СТАТИКА
Вданном разделе рассматриваются задачи на равновесие системы тел и расчет плоских шарнирных ферм.
Исследуется влияние геометрических параметров на величины реакций связей, определяются области их допустимых значений.
2.2.1 РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
Важной задачей статики системы твердых тел является определение внешних и внутренних реакций связей. Основным способом их нахождения является способ расчленения, при котором рассматривается равновесие отдельных тел системы.
Пример 1. Равновесие двух тел
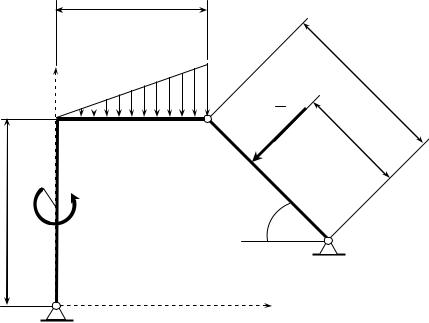
Конструкция состоит из жесткого угольника ADC и стержня BC , которые шарнирно соединены друг с другом в точке C (рис. 2.2.1).
b
qmax
y |
c |
D |
C |
P |
s |
|
L
a
M |
α |
B |
|
|
|
A |
x |
|
Рис. 2.2.1 Равновесие двухзвенной конструкцииADCB .
Внешними связями, наложенными на конструкцию, являются неподвижные опоры, приложенные в точках A и B . Конструкция находится в равнове-
54
сии под действием пары сил с моментом M , сосредоточенной силы P и распределенной нагрузки, действующей на участке DC угольника ADC по линейному закону. Максимальное значение интенсивности распределенной нагрузки qmax .
Определить реакции внешних и внутренних связей в точкахA , B и C если
a = 2 м, |
b = 3 м, |
c = 4 м, |
s =1 м, α = |
π |
, |
M =10 кН м, |
P = 20 кН, |
qmax = 5 кН м. |
|
2 |
|
|
|
|
Решение
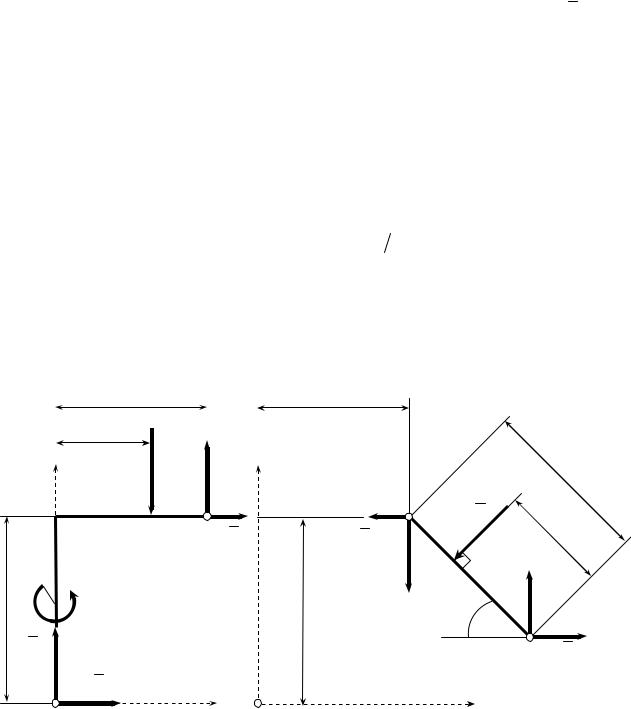
Для определения реакций связей расчленим конструкцию и рассмотрим равновесие каждой ее части отдельно (рис. 2.2.2).
|
|
|
b |
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|||||
|
|
2 |
b |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||
|
|
Q |
|
|
C |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Y |
|
c |
||
y |
y |
|||||||||||
|
|
|
|
|
|
|||||||
D |
|
|
|
C |
P |
s |
E |
C |
XC |
|
|||
X' |
|
|||||
|
|
|||||
|
|
|
|
C |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
YB |
||||
a |
a |
Y'C |
||||||
|
|
|
||||||
|
|
|
α |
|||||
M |
|
|
|
|
||||
YA B XB
A XA a ) x A b ) x
Рис. 2.2.2 Расчетная схема угольника ADC (а) и стержня BC (б).
Рассмотрим равновесие угольника ADC (рис. 2.2.2 а). Проведем координатные оси xAy и изобразим действующие на угольник силы: пару сил с момен-
|
|
Q = |
1 qmax b |
, прило- |
|
томM , равнодействующую распределенной нагрузки Q |
|||||
|
|
|
2 |
|
|
55
женную в точке E DE = 23 b , и реакции связей. Реакции неподвижной шарнирной опоры A и шарнира C изображаем двумя их составляющими: X A , YA и XC , YC .
Угольник ADC находится в равновесии под действием произвольной плоской системы сил, для которой можно записать три независимых уравнения равновесия.
Рассмотрим равновесие стержня BC (рис. 2.2.2 б). Изобразим действую-
щие на стержень силы: силу P и реакции связей. Реакцию неподвижной шар-
нирной опоры B изображаем двумя ее составляющими: X B , YB , а реакции шарнира C : XC′ и YC′ направим, согласно аксиоме о равенстве сил действия и противодействия, в стороны противоположные реакциям шарнира C — XC ,
YC угольника ADC .
Стержень BC находится в равновесии под действием произвольной плоской системы сил, для которой также можно записать три независимых уравнений равновесия.
Число неизвестных величин, с учетом аксиомы о равенстве сил действия и противодействия RC = −RC′ , равно шести (реакции связей X A , YA , X B , YB , XC ,
YC ). Число независимых уравнений равновесия для обеих частей конструкции также равно шести. Задача является статически определимой.
Для решения поставленной задачи необходимо составить шесть уравнения равновесия, по три для каждого звена конструкции, например
ADC : |
∑Fkx = 0, |
∑Fky = 0, |
|
k |
k |
BC : |
∑Fkx = 0, |
∑Fky = 0, |
|
k |
k |
∑M A (Fk )= 0;
k
∑MC (Fk )= 0.
k
Формируем активные силы, действующие на конструкцию
|
|
0 |
|
|
−P sin(α) |
|
|
0 |
|
||
F := |
−Q |
|
F |
:= |
−P cos (α) |
M |
1 |
:= 0 |
|
||
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
M |
|
56
Формируем выражения для сил реакций связей
|
Xa |
|
Xb |
|
Xc |
|
−Xc |
||||
R |
:= |
Ya |
R |
:= |
Yb |
R |
:= |
Yc |
R' |
:= |
−Yc |
A |
|
|
B |
|
|
C |
|
|
C |
|
|
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
Определяем радиус-векторы точек приложения действующих внешних сил.
|
0 |
|
|
b |
|
r |
:= 0 |
|
r |
:= a |
|
A |
|
|
C |
|
|
|
0 |
|
|
0 |
|
|
c cos (α) |
|
(c − s) cos (α) |
|
|
2 |
b |
|||||
|
|
|
3 |
|||||||||
r := r |
+ |
−c sin(α) |
r := r |
+ |
−(c − s) sin(α) |
r |
:= |
|
|
|||
B C |
|
|
|
L C |
|
|
|
E |
|
a |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вычисление главного вектора PAC и главного момента M A внешних сил, действующих на угольник ADC .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xa + Xc |
|
|
PAC := F1 + RA + RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
PAC simplify → |
−Q + Ya + Yc |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
MA := rE × F1 + rA × RA + rC × RC + M1 |
|
M |
A |
simplify |
→ |
|
|
|
0 |
|
||||||||||||||
|
−2 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
b Q + b Yc − a Xc + M |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление главного вектора |
|
BC |
и главного момента MC внешних сил, действующих на |
|||||||||||||||||||||
P |
||||||||||||||||||||||||
стержень BC . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−P sin(α) + Xb − Xc |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
PBC := F2 + RB + R'C |
|
|
|
|
|
|
|
|
|
PBC simplify |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
→ |
|
−P cos (α) + Yb − Yc |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
(r |
− r )× F |
+ (r |
|
|
)× R |
|
|
|
|
|
|
|
|
0 |
|
||||||
M |
C |
:= |
− r |
|
M |
C |
simplify |
→ |
|
|
|
0 |
|
|||||||||||
|
|
L |
C |
2 |
B |
|
C |
B |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−P c + P s + c cos (α) Yb + c sin(α) Xb |
||||
Формирование ортов |
|
, |
|
, |
|
декартовой системы координат. |
|
|
||||||||||||||||
i |
j |
k |
|
|
||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
||||
i := 0 |
|
|
|
|
|
|
|
|
|
|
j := |
|
1 |
|
|
|
|
|
|
k := 0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
Формируем и вычисляем левую часть уравнений равновесия
Ur :=
PAC i
PAC j MA k
PBC i PBC j MC k
|
|
Xa + Xc |
|
|
|
−Q + Ya + Yc |
|
|
|
|
|
|
−2 |
b Q + b Yc − a Xc + M |
|
|
3 |
|
|
Ur simplify → |
|
|
|
|
−P sin(α) + Xb − Xc |
||
|
|
|
|
|
|
−P cos (α) + Yb − Yc |
|
|
|
|
|
|
−P c + P s + c cos (α) Yb + c sin(α) Xb |
||
Вводим исходные данные для расчета
a := 2 |
b := 3 |
c := 4 |
s := 1 |
M := 10 |
P := 20 |
qmax:= 5 |
α := |
π |
|
|
|
|
|
|
|
|
6 |
57
Задаем начальное приближение для неиз- |
Вычисление равнодействующей распределен- |
|||||||
|
|
, интенсивность которой изме- |
||||||
ной нагрузкиQ |
||||||||
вестных реакций. |
няется по линейному закону. |
|||||||
Xa |
|
0 |
||||||
|
|
|
|
|||||
|
Ya |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xb |
|
|
0 |
|
1 |
|
|
|
Yb |
:= |
|
0 |
|
Q := 2 qmax b * |
|
Q = 7.5 |
|
|
|
|
|
|
|
|
|
|
Xc |
|
|
0 |
|
|
|
|
Yc |
|
0 |
|
|
|
|||
Задаем начало блока решений системы уравнений "Given", и формируем систему уравнений равновесия с помощью операций копирования и вставки.
Given |
|
|
|
|
|
|
|
Xa + Xc |
|
||
|
|
−Q + Ya + Yc |
|
||
|
|
|
|||
|
−2 |
b Q + b Yc − a Xc + M |
|
||
|
3 |
|
|||
|
−P sin(α) + Xb − Xc |
|
|
0 |
|
|
|||||
|
|
||||
|
|
|
|||
|
|
−P cos (α) + Yb − Yc |
|
||
|
|
|
|
||
|
−P c + P s + c cos (α) Yb + c sin(α) Xb |
||||
Вычисляем неизвестные реакции связей с помощью процедурыFind , которая указывает окончание блока решения.
Xa |
|
Xa |
Xa |
|
5.981 |
|
||||||||
|
Ya |
|
|
|
Ya |
|
|
Ya |
|
|
|
9.821 |
|
|
|
Xb |
|
|
|
Xb |
|
|
Xb |
|
|
|
4.019 |
|
|
|
|
:= Find |
|
|
|
|
= |
|
|
|||||
|
Yb |
|
|
Yb |
|
|
Yb |
|
|
15 |
|
|||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
Xc |
|
|
|
Xc |
|
|
Xc |
|
|
|
−5.981 |
||
Yc |
|
Yc |
Yc |
|
−2.321 |
|||||||||
Формируем векторы реакций внешних и внутренних связей, действующих на конструкцию. Вычисляем модули реакций и их ориентацию относительно декартовой системы координат.
|
|
Xa |
|
R |
|
|
|
|
|
|
5.981 |
|
|
|
|
58.658 |
||||||||
RA := |
|
|
αA := acos |
|
A |
|
deg |
− 1 |
RA = |
|
9.821 |
|
RA |
= 11.498 |
αA = |
|
31.342 |
|
||||||
|
Ya |
|
RA |
|
|
|
|
|
|
|||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
90 |
|
||||
|
|
Xb |
|
R |
|
|
|
|
4.019 |
|
|
|
|
75 |
|
|||||||||
|
|
|
− 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
αB := acos |
|
|
B |
deg |
RB = |
15 |
|
RB |
= 15.529 |
αB = |
15 |
|
|||||||||||
RB := |
|
Yb |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
RB |
|
|
|
|
|
||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
90 |
|
||||
|
|
Xc |
|
R |
|
|
|
|
−5.981 |
|
|
|
158.794 |
|||||||||||
|
|
|
− 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
αC := acos |
|
|
C |
deg |
RC = |
−2.321 |
RC |
= 6.415 |
αC = |
|
|
||||||||||||
RC := |
|
Yc |
|
|
|
|
|
|
|
|
111.206 |
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
0 |
|
RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
90 |
|
||
Исследуем влияние геометрических параметров балки на величины реакций и найдем области их допустимых значений.
Проводя анализ уравнений равновесия, видим, что решение существует, если определитель матрицы A , составленной из коэффициентов при неизвестных реакциях связей, не равен нулю.
58
|
1 |
0 |
0 |
||
|
|
0 |
1 |
0 |
|
|
|
0 |
0 |
0 |
|
A := |
|
||||
|
0 |
0 |
1 |
||
|
|||||
|
|
||||
|
|
0 |
0 |
0 |
|
|
0 |
0 |
c sin(α) |
||
0 |
1 |
0 |
|
0 |
0 |
1 |
|
0 |
−a |
b |
|
|
|||
0 |
−1 |
0 |
|
|
|||
1 |
0 |
−1 |
|
c cos (α) |
0 |
0 |
|
substitute ,a  AC cos (γ)
AC cos (γ)
Asubstitute ,b  AC sin(γ)→ −c AC (cos (γ) cos (α) + sin(α) sin(γ)) factor
AC sin(γ)→ −c AC (cos (γ) cos (α) + sin(α) sin(γ)) factor
Выражение для определителя матрицы A преобразуем к виду (рис. 2.2.3)
det (A)=−c AC cos(α −γ )= −c h .
Величина h определяет расстояние от точки A до стержня CB . Если
h = 0, определитель |
матрицы |
A равен |
нулю. Математически |
это условие |
det (A)= 0 можно записать в виде |
|
|
||
|
α = ±π +γ , гдеγ |
= arctg b . |
|
|
|
|
2 |
a |
|
Таким образом, существует два положения стержня CB , определяемые |
||||
углами αmin = −π +γ |
и αmax = |
π +γ , при которых решения не существует. В |
||
2 |
|
2 |
|
|
этом случае стержень CB расположен на линии AC , например, |
так, как пока- |
|||
зано на рис. 2.2.3. Конструкция получает дополнительную степень свободы и превращается в механизм, в котором звено ADC может совершать вращательное движение вокруг неподвижной опоры A , а звено CB — вокруг опоры B .
При значениях α =αmin или α =αmax :
Величина главного момента плоской системы сил не равна нулю и, относительно точки A , определяется выражением
M A = M − 23 Q b + P(AC −c + s) ;
Значение главного вектора плоской системы сил стремится к нулю при стремлении неизвестных реакций к бесконечности.
59

|
|
b |
|
2 |
Q |
|
3 b |
|
y |
|
|
D |
|
C |
|
|
|
|
|
L |
a |
|
P |
|
|
|
M |
α |
s |
|
|
|
γ |
B |
c |
A
x
Рис. 2.2.3 Превращение равновесной двухзвенной конструкции в механизм Исследуем теперь влияние угла α на величину реакций связей. Для этого
представим вычисляемые реакции функциями параметра α . При необходимости, таких параметров может быть несколько. В ниже представленном документе Mathcad реализована процедура анализа и определения экстремумов исследуемых величин.
Вводим исходные данные для расчета (Значение влияющего параметра α не задается)
a := 2 |
b := 3 |
c := 4 |
s := 1 |
M := 10 |
qmax:= 5 |
P := 20 |
|
Вычисляем вспомогательные величины и задаем начальные приближения неизвестных реакций для решения уравнений равновесия с помощью блока Given − Find
Xa |
|
0 |
|
1 |
|
|
|
|
b |
||||
|
Ya |
|
|
|
0 |
|
Q := |
q |
b |
* |
γ := atan |
||
|
Xb |
|
|
|
0 |
|
|
2 |
|
max |
|
a * |
|
|
|
:= |
|
|
|
|
|
|
|
|
|
||
|
Yb |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Q = 7.5 |
|
|
γ deg− 1 = 56.31 |
|||||
|
Xc |
|
|
|
0 |
|
|
|
|||||
Yc |
|
0 |
|
|
|
|
|
|
|
||||
Given
60