

Консольного (I) и бесконсольного (II) фрезерных станков:
1 – деформация колонны; 2 – деформации станины или консоли: 3 – смещения
в горизонтальных направляющих; 4 - смещения в вертикальных направляющих;
fx, fy, fz – упругие перемещении инструмента относительно заготовки
соответственно по осям х, у, z

Рис. 4.2. Влияние компоновки на характер температурных деформаций
Универсальность станка также значительно влияет на окончательный выбор его компоновки. При этом необходимо учитывать массу, габариты, транспортабельность, способы закрепления обрабатываемых деталей на данном станке для всего их множества. Кроме того, от компоновки станка зависит и его переналаживаемость. Для станков с ручным управлением очень важным фактором является удобство обслуживания.
4.1. Структурный анализ базовых компоновок
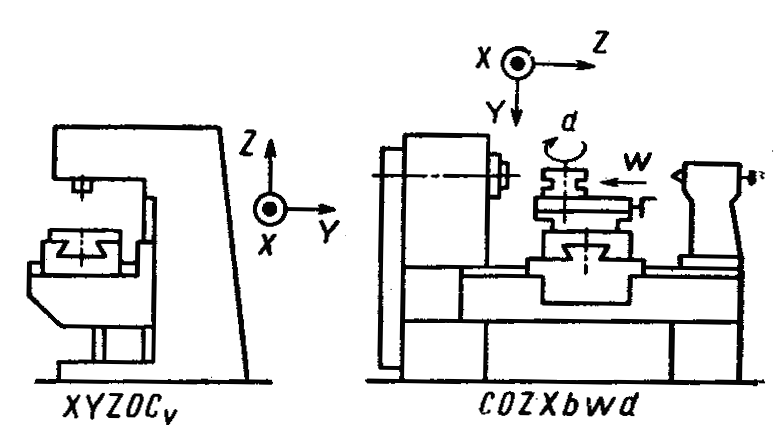
Исходя из заданных движений инструмента относительно обрабатываемой детали, можно рассмотреть всю совокупность возможных базовых компоновок, пользуясь методом Ю.Д. Врагова. Если выбрать прямоугольную систему координат, ориентированную в неподвижном пространстве, то минимальное число подвижных узлов должно соответствовать числу заданных элементарных движений. Обозначим неподвижный узел символом О, а подвижные узлы символами X, Y, Z, если они перемещаются прямолинейно по соответствующим осям координат, и буквами А, В, С – вращательные движения относительно тех же осей. Последовательность расположения узлов станка, которая и определяет его базовую компоновку, тогда можно записать структурной формулой, в которой запись будет начинаться с узла, несущего заготовку, а кончаться узлом, несущим режущий инструмент. На рис. 4.3 приведены компоновки некоторых типов станков общего назначения и соответствующие этим компоновкам формулы условной записи [12].
а) б)

в) г)
Рис. 4.3. Типичные компоновки некоторых станков:
а – консольно-вертикально-фрезерного; б – токарного; в – зубодолбежного;
г – сверлильного агрегатного
Формализация компоновок в виде условной записи имеет то достоинство, что позволяет рассмотреть все возможное множество вариантов компоновок путем формальной перестановки символов в формуле.
Все возможные варианты компоновки могут быть сведены в матрицу (рис. 4.4, а). Столбцы матрицы различаются положением неподвижного узла, а строки (попарно) положением вертикально перемещаемого узла. Анализ всего множества компоновок, заключенных в матрице, осуществляют на основе выделения подмножеств, обладающих некоторыми общими признаками. Так, например, варианты последнего столбца приводят к компоновкам с неподвижным изделием, варианты, выделенные из третьего и четвертого столбцов жирной линией (рис. 4.4, а), дают компоновки с подвижной стойкой (рис. 4.5).
|
ZYXO |
ZXOY |
ZOXY |
OZXY |
|
|
|
|
OZXY |
|
ZXYO |
ZYOX |
ZOYX |
OZYX |
|
|
|
|
OZYX |
|
XZYO |
X |
XOZY |
OXZY |
|
|
|
XOZY |
OXZY |
|
YZXO |
YZOX |
YOZX |
OYZX |
|
|
|
YOZX |
OYZX |
|
XYZO |
XYOZ |
XOYZ |
OXYZ |
|
|
XYOZ |
XOYZ |
OXYZ |
|
YXZO |
YXOZ |
YOXZ |
OYXZ |
|
|
YXOZ |
YOXZ |
OYXZ |
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
б) |
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OZXY |
|
|
ZXOY |
|
|
|
|
|
|
OZYX |
|
|
ZYOX |
|
|
|
|
|
XOZY |
OXZY |
|
|
|
|
|
|
|
|
YOZX |
OYZX |
|
|
|
|
|
|
|
|
XOYZ |
OXYZ |
|
|
|
XOYZ |
|
|
|
|
YOXZ |
OYXZ |
|
|
|
YOXZ |
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
г) |
| ||

 ZOY
ZOY


Рис. 4.4. Матрицы вариантов компоновок:
а – полное множество для формулы XYZO; б – подмножество при отсутствии
вертикального перемещения детали; в – подмножество при одном только горизонтальном перемещении детали; г – подмножество при условии примыкания горизонтального
перемещаемого узла к неподвижной станине

Рис. 4.5. Варианты компоновок станка с подвижной стойкой
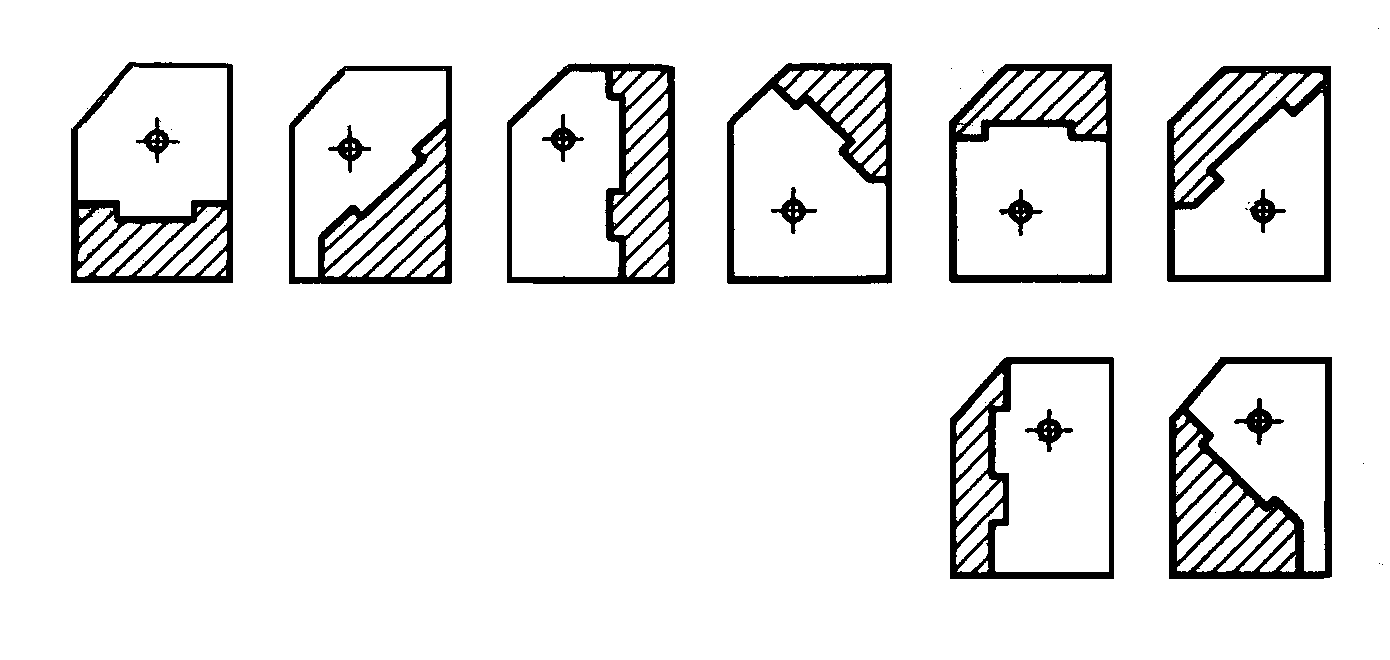
Число различных вариантов компоновок возрастает из-за возможности их различного расположения в пространстве. Все 24 варианта базовых компоновок, обусловленных различием в последовательности расположения узлов станка между инструментом и обрабатываемой деталью, могут быть ориентированы в пространстве как горизонтальные или вертикальные. Кроме того, компоновка станка по указанным ранее соображениям отвода стружки и охлаждающей жидкости для изменения теплового баланса может предусматривать различную конструкцию и расположение направляющих (рис. 4.6, а-г и рис. 4.7, а-з).

а) б) в)

г)
Рис. 4.6. Варианты расположения подвижных узлов станка в пространстве
а) б) в) г) д) е)

ж) з)
Рис. 4.7. Варианты ориентации направляющих при неизменной исходной