

3.4.3. Коробки скоростей со сложенной структурой
Обычная множительная структура, состоящая из одной кинематической цепи с последовательным соединением групп передач, является наиболее простой. Она позволяет создавать рациональные приводы главного движения. Однако во многих случаях, особенно при увеличении диапазона регулирования скоростей, создать простой привод, удовлетворяющий требованиям, на базе обычной структуры невозможно. Поэтому в практике станкостроения применяют так называемые сложенные структуры – структуры многоскоростного привода, состоящие из двух или более кинематических цепей, каждая из которых является обычной множительной структурой. Одна из этих цепей (короткая) предназначена для высоких скоростей привода, другие (более длинные) – для низких скоростей [6].
Множительные
структуры состоят чаще всего из двух,
реже из трех кинематических цепей. Общее
число скоростей привода для структуры,
состоящей из двух цепей,
![]() ,
где
,
где![]() и
и![]() – число ступеней первой и второй
кинематических цепей. Если цепи имеют
одинаковые группы передач (по количеству
и характеристике), то их можно объединить
в общую цепь. Пустьzо
– число скоростей общих передач,
– число ступеней первой и второй
кинематических цепей. Если цепи имеют
одинаковые группы передач (по количеству
и характеристике), то их можно объединить
в общую цепь. Пустьzо
– число скоростей общих передач,
![]() ,
а
,
а![]() ;
тогда
;
тогда
![]() .
Общую часть структурыzо,
используемую для получения всех
скоростей, называют основной, zд
– дополнительной.
.
Общую часть структурыzо,
используемую для получения всех
скоростей, называют основной, zд
– дополнительной.
Для объединения составляющих структур в одну – сложенную в схему привода – вводят соединительные передачи. Наиболее распространенные принципиальные схемы соединения двух структур представлены на рис. 3.7.
Верхнюю
область регулирования скоростей вращения
шпинделя получают при помощи основной
структуры zо
и
передают движение на шпиндель I
через зубчатую передачу
![]() (рис. 3.7,а)
или через муфту 1
(рис.
3.7, б).
Нижнюю
область регулирования обеспечивают
последовательным соединением основной
zо
и дополнительной zд
структур
соединительной передачей (на схеме
показано условно).
(рис. 3.7,а)
или через муфту 1
(рис.
3.7, б).
Нижнюю
область регулирования обеспечивают
последовательным соединением основной
zо
и дополнительной zд
структур
соединительной передачей (на схеме
показано условно).

б)
а) в)
Рис. 3.7. Схемы соединения множительных структур
На
рис. 3.8 показана простая схема коробки
скоростей со сложенной структурой.
Здесь сложены две кинематические цепи,
структуры которых:
![]() и
и![]() .
Группы колесрa
и
рb
являются общими и поэтому образуют
основную структуру
.
Группы колесрa
и
рb
являются общими и поэтому образуют
основную структуру
![]() ;
они вращают полый валIII.
Далее
движение шпинделю V
от
первой цепи передается с помощью муфты,
а
от
второй цепи – через звено возврата
(перебор) с колесами
;
они вращают полый валIII.
Далее
движение шпинделю V
от
первой цепи передается с помощью муфты,
а
от
второй цепи – через звено возврата
(перебор) с колесами
![]() и
и![]() ,
которые играют роль соединительных
передач. Общее число скоростей привода
,
которые играют роль соединительных
передач. Общее число скоростей привода
![]() .
.

Рис.
3.8. Схема коробки скоростей со сложенной
структурой
![]()
Для
нашего случая рa
=
31;
рb
=
23
и рс
= рd
= 1. Поэтому
![]() .
.
На
рис. 3.9 показано графическое сложение
структур для рассматриваемой коробки
скоростей. На
рис.
3.9, а
представлены отдельно сетки для каждой
структуры. Первая обеспечивает ряд
![]() ,
вторая – ряд
,
вторая – ряд
![]() .
Условимся муфты изображать штриховым
лучом (на структурной сетке он может
занимать любое положение, на графике
частот вращения – только горизонтальное).
Тогда
все точки, изображающие частоты вращения
вала III,
соединим
горизонтальными штриховыми лучами с
точками
.
Условимся муфты изображать штриховым
лучом (на структурной сетке он может
занимать любое положение, на графике
частот вращения – только горизонтальное).
Тогда
все точки, изображающие частоты вращения
вала III,
соединим
горизонтальными штриховыми лучами с
точками
![]() вала
V.
Первые
две группы передач (31
и 23)
у
обеих структур одинаковы. Принимаем их
как общие и придаем первой структуре
вала
V.
Первые
две группы передач (31
и 23)
у
обеих структур одинаковы. Принимаем их
как общие и придаем первой структуре
![]() .
Наносим последнюю на сложенную сетку
(рис. 3.9, б).
Точки, изображающие частоты вращения
вала III,
располагаются в верхней части графика.
Соединяем их штриховыми линиями с
точками
.
Наносим последнюю на сложенную сетку
(рис. 3.9, б).
Точки, изображающие частоты вращения
вала III,
располагаются в верхней части графика.
Соединяем их штриховыми линиями с
точками
![]() .Из
них же проводим лучи, изображающие
соединительную передачу 1
– 7,
2
– 8,
…, 7
– n6,
8
– n5
…
.Из
них же проводим лучи, изображающие
соединительную передачу 1
– 7,
2
– 8,
…, 7
– n6,
8
– n5
…
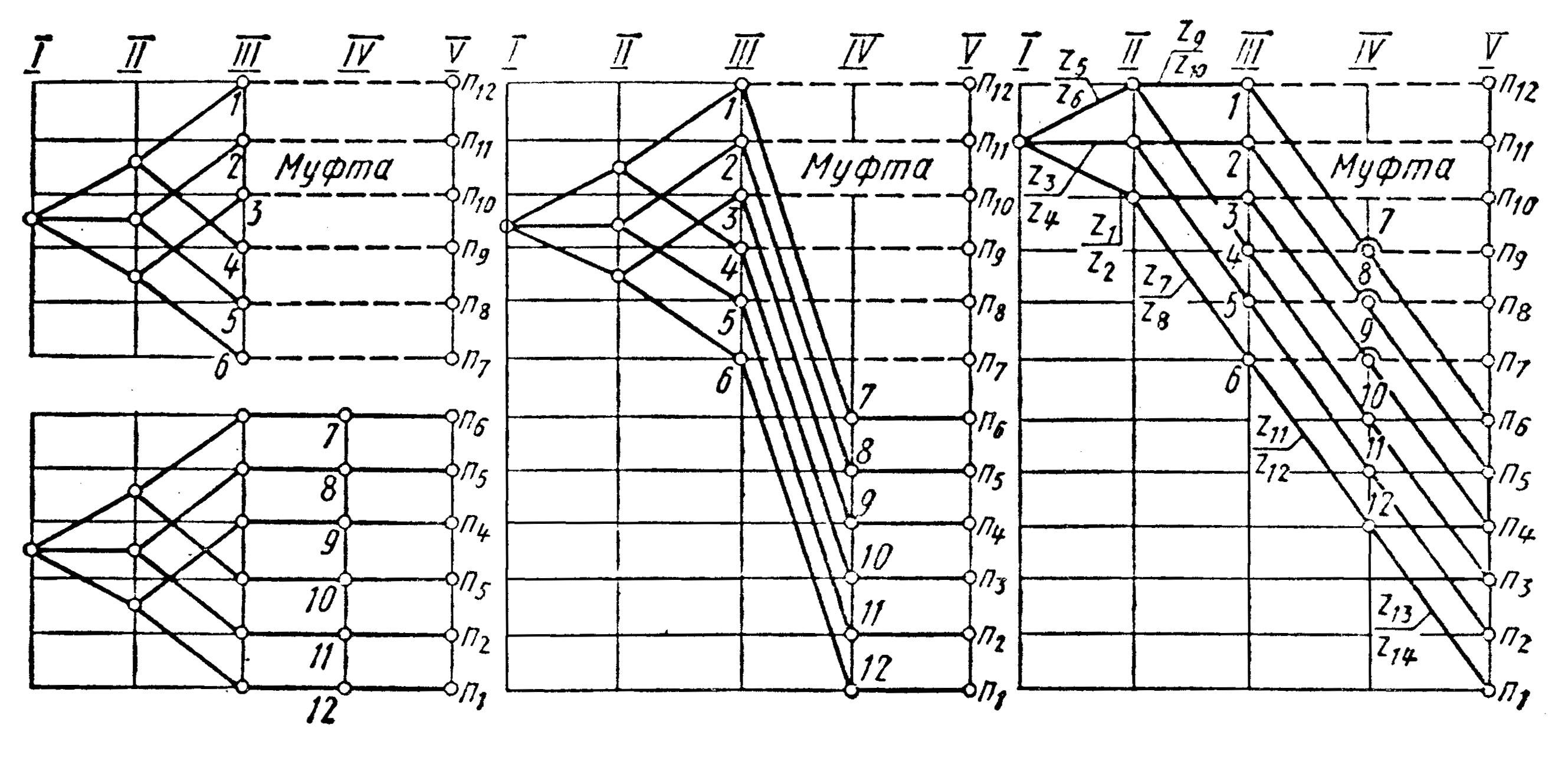
а) б) в)
Рис. 3.9. Структурная сетка и график частот вращения коробки скоростей