

Мёртвая вода (2)
.pdfОрганизация (…) управления народным хозяйством
недопустимо в одном и том же алгоритме расчетов и/или управ- ления не различать их и смешивать. Теперь обратимся к рис. 6.
РИС. 6. УПРАВЛЕНЧЕСКИ НОРМАЛЬНЫЕ ПЕРЕХОДНЫЕ РЕЖИМЫ С ВЫХОДОМ НА УДОВЛЕТВОРЕНИЕ ДЕМОГРАФИЧЕСКИ ОБУСЛОВЛЕННОГО УРОВНЯ ПОТРЕБНО-
СТЕЙ.
На нём кривая I — прогноз демографически обусловленных потребностей в продукции отрасли i. Также показаны кусочно- ломаная линейная модель-аппроксимация («План А» — «П-А») и реальное производство под управлением на основе плана «Произ- водство А»; кроме того — кусочно-ломаная линейная модель- аппроксимация («План Б» — «П-Б») и реальное производство под управлением на основе плана «Производство Б». I’, I’’ — коррек- ции прогноза и обусловленная коррекцией прогноза I’’ коррекция плана «А» в процессе его осуществления — A’’.
Ясно, что ошибка в прогнозе I , впоследствии которой возника- ет коррекция прогноза I’ предпочтительнее, чем ошибка в прогно- зе I’’, впоследствии которой возникает коррекция плана A’’, по- скольку коррекция I’ в общем-то не вызывает необходимости кор- рекции планов, в отличие от коррекции прогноза I’’ , вызванной ошибкой прогноза I.
311

Мёртвая вода
Так же ясно с точки зрения потребителя план «А» лучше, чем план «Б», поскольку раньше выводит производство XK i на уровень демографической достаточности. Выход системы производства на уровень демографически обусловленной достаточности проявля- ется как сбыт по бросовым ценам (если не нулевым) при поддер- жании некоторого уровня товарных запасов продукта « i » при пополнении запасов за счёт текущего производства, кривая кото-
рого колеблется относительно прогнозной кривой с управленчески незначительной амплитудой и частотой, не вызывающими обще- ственно ощутимого дискомфорта1.
Рис. 6 показывает управленчески нормальное соотношение прогноза, плана (концепции управления) и реализующегося процесса управления (производства).
Но реально таких рисунков должно быть n — по числу отрас- лей. И каждый такой рисунок — проекция на ось « x i » n-мерной прокладки (штурманский термин) экономического курса, т.е. пла- на и n-мерной траектории реального движения объекта управле- ния, следующего проложенным курсом с некоторой ошибкой в n-мерном пространстве параметров, которыми описывается про- цесс.
В ином видении это — задача попадания в n-мерном простран- стве в движущуюся медленно маневрирующую цель самонаводя- щимся (или управляемым) снарядом. Специалисты военно- промышленного комплекса (ВПК) с начала 1950-х гг. для случая
трехмерного пространства неоднократно заказывали её решения математикам для нужд противовоздушной, противоракетной, про-
тиволодочной обороны и иных задач вывода средств поражения на движущуюся цель в кратчайшее время и, при необходимости, последующее её устойчивое ближнее сопровождение с вероятно- стно предопределенным успехом (т.е. заранее известной вероятно-
1 По отношению к жилищному строительству это выглядит так: если нет завершенного жилища, то можно не испытывая особого дискомфорта подождать месяц — два; но если возможности вселиться в свой дом ждать приходится годы и десятилетия после того как несколько поколе-
ний не видели на своем веку всёразрушающих войн и континентального масштаба стихийных бедствий, то это — паразитизм правящего режима и его хозяев на народе.
312
Организация (…) управления народным хозяйством
стью поражения цели, определяющей качество управления сред- ствами поражения). Это говорит о том, что математический аппа- рат и работоспособные алгоритмы где-то лежат в уже готовом виде и нуждаются лишь в модификации их для пространства кон- трольных параметров размерности « n », а также в метрологиче- ски состоятельной макро- и микроэкономической интерпретации входящих в алгоритмы параметров и переменных.
При адаптации алгоритмов к решению задач оптимизации мак- роэкономики, необходимо учесть, что общество порождает одно обстоятельство, которое не довлеет, по крайней мере, над боль-
шинством военных приложений математики в задачах поражения движущейся цели. Военным всё равно, поразит ракета самолёт при заходе на цель с её носовой, хвостовой, нижней или верхней полусферы. Но обществу не всё равно, выйдет ли народное хозяй-
ство на демографически обусловленный уровень производства хлеба и жилья, или же сначала в изобилии будут производиться зубочистки, а правящая “элита” будет раз в год менять лимузины, но хлеба вдоволь хватит только каждому десятому, а семьи будут разрушаться из-за того, что негде жить, поскольку эти виды про- изводства будут отложены на “потом”.
Формально математически это означает, что если в n-мерном пространстве есть две точки, а объект необходимо перевести из одной из них в другую, то даже если существует некоторое мно-
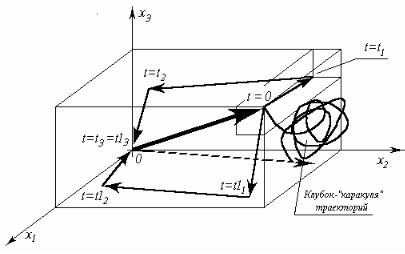
жество равновозможных траекторий и время перевода объекта по любой из них — одно и то же, то эти траектории всё же управлен- чески не эквивалентны. Трёхмерный случай, иллюстрирующий эту неэквивалентность, показан на рис. 7.
На рис. 7 «0 x1 x2 x3» — пространство параметров, каждый из которых является мерой одной из трех частных ошибок управле- ния в составе трехмерного вектора ошибки управления. То есть идеальному режиму управления соответствует начало координат. Радиус-вектор, идущий сплошной линией из начала координат, — вектор ошибки управления в момент времени t = 0 . Траектории, определяемые последовательностью положений: t = 0 , t = t1 ,
t = t2 , t = t3 и t = 0 , t = t11 , t = t12 , t = t13 = t3 — ведут из одной и той же точки в одно и то же начало координат и переход по лю-
бой из них длится одинаковое время t3 . Выбор переходного ре-
313
Мёртвая вода
жима (траектории) субъективно произволен, но первая траектория
— оптимальна при упорядоченности вектора целей управления ( x1 , x2 , x3 ), вторая — оптимальна при упорядоченности ( x3 , x2 , x1). В реальном процессе упорядоченность параметров в векторе целей, воистину принятая в управление, выражается в порядке исчезновения частных ошибок управления (обнуления компонент вектора ошибки), вне зависимости от деклараций о благих намерениях управленцев.
РИС. 7. ЗАВИСИМОСТЬ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ ПЕРЕВОДА ОБЪЕКТА ОТ УПОРЯДО- ЧЕННОСТИ ОДНОГО И ТОГО ЖЕ НАБОРА КОНТРОЛЬНЫХ ПАРАМЕТРОВ В ВЕКТО-
РЕ ЦЕЛЕЙ УПРАВЛЕНИЯ
Предположим, что на рис. 7: x1 — мера недостачи возможно- стей в получении образования подрастающим поколением; x2 — мера недостачи в питании, одежде, жилье, инфраструктурах; x3 — мера дефицита в роскоши и продукции деградационно- паразитического спектра потребностей. В силу действия неформа- лизуемых взаимно исключающих обусловленностей параметров x1 и x3 при упорядоченности ( x3 , x2 , x1), система вряд ли пройдет по соответствующей такой упорядоченности траектории далее поло- вины пути. Скорее всего, вследствие действия не формализован- ных в модели факторов, она уклонится в иной ошибочный режим, показанный пунктирным радиус-вектором, идущим из начала
314
Организация (…) управления народным хозяйством
координат, который возможно не будет устойчивым балансиро- вочным режимом. Именно на этот путь ступили “демократиза- торы” и хотят вести по нему народ.
Тому, кто себе в лоб забил алкогольно-никотиновый кол, лично непотребно образование, новое знание, поскольку оно — в тягость наркотически угнетенному. А его потомство, вследствие вероятно- стно предопределенных генетических нарушений, как в биомассе организма, так и в искалеченной и подавленной психике, возмож- но не сможет освоить и те знания и культурные навыки, что были достоянием предков. Это приведет к падению культуры производ- ства и уронит спектры производства и потребления.
“Саморегуляция” рынка без разделения демографически обу- словленного и деградационных спектров будет выглядеть на рис. 7 по этим информационным причинно-следственным обусловлен- ностям как хаотичное мельтешение ненулевого радиус-вектора в пространстве параметров, относительно какого-то среднестати-
стического положения, управляемого внесистемными факторами. “Саморегуляция” такого рода показана на рис. 7 как клубковид- ная “каракуля”.
Оптимизация каждого из множества производственных циклов T вне объемлющей задачи оптимизации по минимуму времени переходного процесса исчерпания недостаточности демографиче- ски обусловленного спектра потребления — изначально методо- логически несостоятельная задача, поскольку это — “оптималь- ный” шаг неизвестно куда. Но и оптимизация переходного макро- экономического процесса — лишь частная задача в процессе пе- рехода к жизни общества в ладу с объемлющей его биосферой.
Теперь рассмотрим метод динамического программирования,
поскольку хотя и было показано, что алгоритмы решения задачи об оптимальном наведении средств поражения на цель в нынеш- ней цивилизации не могут не существовать, тем не менее необхо- димо содержательно обсудить ещё некоторые “само собой” разу- меющиеся очевидности, касающиеся оптимального выбора траек- торий многопараметрических переходных процессов.
Формализованный выбор оптимальной в некотором смысле траектории в n-мерном пространстве возможен, в частности на основе использования аппарата “динамического программирова-
315
Мёртвая вода
ния”. Термин “динамическое программирование”, также как и термин “линейное программирование”, — прижившийся в Рус- ском языке подстрочник, мало что говорящий о существе самого метода.
Аппарат динамического программирования позволяет решать задачи многопараметрической оптимизации в тех случаях, когда в силу разного рода объективно-математических причин (дискрет- ность ограничений, нелинейности, нарушение свойства выпукло- сти и т.п.) аппарат линейного программирования неработоспосо- бен. Вполне понятно, что он тоже не изучался и не изучается в большинстве вузовских курсов СССР и России на специально- стях, в которых владение им придает квалификации специалистов КАЧЕСТВЕННО более высокий уровень.
Метод динамического программирования как алгоритмическое выражение достаточно общей теории управления
В изложении существа метода динамического программирова- ния мы опираемся на книгу “Курс теории автоматического управ- ления” (автор Палю де Ла Барьер: французское издание 1966 г., русское издание — “Машиностроение”, 1973 г.), хотя и не повто- ряем его изложения. Отдельные положения взяты из курса “Ис- следование операций” Ю.П.Зайченко (Киев, “Вища школа”, 1979 г.).
Метод динамического программирования работоспособен, если
формальная интерпретация реальной задачи позволяет выполнить следующие условия:
1. Рассматриваемая задача может быть представлена как N-шаговый процесс, описываемый соотношением:
Xn + 1 = f(Xn, Un, n), где n — номер одного из множества воз- можных состояний системы, в которое она переходит по заверше- нии n-ного шага; Xn — вектор состояния системы, принадлежа- щий упомянутому n-ному множеству; Un — управление, вырабо- танное на шаге n (шаговое управление), переводящее систему из возможного её состояния в n-ном множестве в одно из состояний (n + 1)-го множества. Чтобы это представить наглядно, следует обратиться к рис. 4, о котором речь пойдет далее.
316
Организация (…) управления народным хозяйством
2.Структура задачи не должна изменяться при изменении рас- четного количества шагов N.
3.Размерность пространства параметров, которыми описыва- ется состояние системы, не должна изменяться в зависимости от количества шагов N.
4.Выбор управления на любом из шагов не должен отрицать выбора управления на предыдущих шагах. Иными словами, оп-
тимальный выбор управления в любом из возможных состояний должен определяться параметрами рассматриваемого состояния, а не параметрами процесса, в ходе которого система пришла в рас- сматриваемое состояние.
Чисто формально, если одному состоянию соответствуют раз- ные предыстории его возникновения, влияющие на последующий выбор оптимального управления, то метод позволяет включить описания предысторий в вектор состояния, что ведёт к увеличе- нию размерности вектора состояния системы. После этой опера- ции то, что до неё описывалось как одно состояние, становится множеством состояний, отличающихся одно от других компонен- тами вектора состояния, описывающими предысторию процесса.
5.Критерий оптимального выбора последовательности шаго-
вых управлений Un и соответствующей траектории в пространстве формальных параметров имеет вид:
V = V0(X0, U0) + V1(X1, U1) + …+ VN - 1(XN- 1, UN - 1) + VN(XN) .
Критерий V принято называть полным выигрышем, а входящие в него слагаемые — шаговыми выигрышами. В задаче требуется найти последовательность шаговых управлений Un и траекторию,
которым соответствует максимальный из возможных полных вы- игрышей. По своему существу полный “выигрыш” V — мера каче- ства управления процессом в целом. Шаговые выигрыши, хотя и входят в меру качества управления процессом в целом, но в об- щем случае не являются мерами качества управления на соответ- ствующих им шагах, поскольку метод предназначен для оптими- зации управления процессом в целом, а эффектные шаговые управления с большим шаговым выигрышем, но лежащие вне оп- тимальной траектории, интереса не представляют. Структура метода не запрещает при необходимости на каждом шаге упот-
317

Мёртвая вода
реблять критерий определения шагового выигрыша Vn, отличный от критериев, принятых на других шагах.
С индексом n — указателем-определителем множеств возмож- ных векторов состояния — в реальных задачах может быть связан некий изменяющийся параметр, например: время, пройденный путь, уровень мощности, мера расходования некоего ресурса и
т.п. То есть метод применим не только для оптимизации управле- ния процессами, длящимися во времени, но и к задачам оптими-
зации многовариантного одномоментного или нечувствительного ко времени решения, если такого рода “безвременные”, “непроцес- сные” задачи допускают их многошаговую интерпретацию.
Теперь обратимся к рис. 8 — рис. 10, повторяющим взаимно связанные рис. 40, 41, 42 из курса теории автоматического управ- ления П. де Ла Барьера.
РИС. 8. К СУЩЕСТВУ МЕТОДА ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ. МАТРИЦА ВОЗМОЖНОСТЕЙ.
На рис. 8 показаны начальное состояние системы — «0» и множества её возможных последующих состояний — «1», «2», «3», а также возможные переходы из каждого возможного состоя-
318
Организация (…) управления народным хозяйством
ния в другие возможные состояния. Всё это вместе похоже на кар- ту настольной детской игры, по которой перемещаются фишки: каждому переходу-шагу соответствует свой шаговый выигрыш, а в завершающем процесс третьем множестве — каждому из со- стояний системы придана его оценка, помещенная в прямоуголь- нике. Принципиальное отличие от игры в том, что гадание о вы- боре пути, употребляемое в детской игре, на основе бросания кос- тей или вращения волчка и т.п., в реальном управлении недопус- тимо, поскольку это — передача целесообразного управления тем силам, которые способны управлять выпадением костей, враще- нием волчка и т.п., т.е. тем, для кого избранный в игре «генератор случайностей» — достаточно (по отношению к их целям) управ- ляемое устройство.
Если выбирать оптимальное управление на первом шаге, то необходимо предвидеть все его последствия на последующих ша- гах. Поэтому описание алгоритма метода динамического про-
граммирования часто начинают с описания выбора управления на последнем шаге, ведущем в одно из завершающих процесс со- стояний. При этом ссылаются на «педагогическую практику», которая свидетельствует, что аргументация при описании алго-
ритма от завершающего состояния к начальному состоянию легче воспринимается, поскольку опирается на как бы уже сложившие- ся к началу рассматриваемого шага условия, в то время как воз- можные завершения процесса также определены.
В соответствии с этим далее на рис. 9 анализируются возмож- ные переходы в завершающее множество состояний «3» из каждо- го возможного состояния в ему предшествующем множестве со- стояний «2», будто бы весь предшествующий путь уже пройден и
осталось последним выбором оптимального шагового управления завершить весь процесс. При этом для каждого из состояний во множестве «2» определяются все полные выигрыши как сумма = «оценка перехода» + «оценка завершающего состояния». Во множестве «2» из полученных для каждого из состояний, в нём возможных полных выигрышей, определяется и запоминается
максимальный полный выигрыш и соответствующий ему переход (фрагмент траектории). Максимальный полный выигрыш для каждого из состояний во множестве «2» взят в прямоугольную
319

Мёртвая вода
рамку, а соответствующий ему переход отмечен стрелкой. Таких оптимальных переходов из одного состояния в другие, которым соответствует одно и то же значение полного выигрыша, в прин- ципе может оказаться и несколько. В этом случае все они в методе неразличимы и эквивалентны один другому в смысле по- строенного критерия оптимальности выбора траектории в про- странстве параметров, которыми описывается система.
После этого множество «2», предшествовав- шее завершающе- му процесс мно- жеству «3», мож-
но рассматривать в качестве завер- шающего, по-
скольку известны оценки каждого из его возмож-
ных состояний (максимальные полные выигры- ши) и дальней-
шая оптимизация последовательно-
сти шаговых управлений и выбор оптималь-
ной траектории могут быть проведены только на ещё не рассмотренных множест- вах, предшествующих множеству «2» в оптимизируемом процессе (т.е. на множествах «0» и «1»).
Таким образом, процедура, иллюстрируемая рис. 9, работоспо-
собна на каждом алгоритмическом шаге метода при переходах из n-го в (n - 1)-е множество, начиная с завершающего N-ного мно- жества до начального состояния системы.
320