

2.2. Будова, принцип роботи приладу та схеми замiщення вимiрюваних об'єктiв
Конденсатори, котушки iндуктивностi й резистори мають комплексний опiр i можуть бути поданi у виглядi однiєї зі схем замiщення (рис.2.4,а i 2.4,б).


Рис. 2.4. Схеми замiщення вимiрюваних об'єктiв
У
паралельнiй схемi замiщення вимiрюваний
iмпеданс подається у виглядi повної
провiдностi
![]() ,
складовi якої (активна провiднiстьg
i реактивна jВ)
з'єднанi паралельно:
,
складовi якої (активна провiднiстьg
i реактивна jВ)
з'єднанi паралельно:
![]() . (2.7)
. (2.7)
Якщо характер реактивної провiдностi ємнiсний, то:
![]() ; (2.8)
; (2.8)
![]() ; (2.9)
; (2.9)
![]() ,
де
f
– частота.
,
де
f
– частота.
У випадку iндуктивного характеру реактивної провiдностi
![]() ; (2.10)
; (2.10)
![]() . (2.11)
. (2.11)
І, вiдповiдно, iндуктивнiсть у паралельнiй схемi замiщення проявляється у виглядi вiд'ємної ємностi
![]() . (2.12)
. (2.12)
Таким чином, паралельну схему замiщення можна охарактеризувати активною провiднiстю g i додатною або вiд'ємною ємнiстю ±С.
У
послiдовнiй схемi замiщення iмпеданс
![]() подається у виглядi послiдовного
з'єднання активногоR
i реактивного опору jХ
подається у виглядi послiдовного
з'єднання активногоR
i реактивного опору jХ
![]() . (2.13)
. (2.13)
Послiдовну схему замiщення можна охарактеризувати активним опором R i додатною або вiд'ємною iндуктивнiстю ±L
![]() , (2.14)
, (2.14)
причому вiд'ємна iндуктивнiсть означає ємнiсний характер реактивного опору:
![]() . (2.15)
. (2.15)
Схеми замiщення не завжди вiдповiдають фiзичнiй структурi вимiрюваного об'єкта, але в основному на частотi 1кГц фiзична структура конденсаторiв вiдповiдає паралельнiй схемi замiщення, а котушок – iндуктивностi послiдовнiй. Тому прилад Е7-8 вимiрює характеристики конденсаторiв у виглядi компонентiв паралельної схеми замiщення, а котушок індуктивності – у виглядi компонентiв послiдовної схеми.
Дуже часто активна складова (втрати) конденсаторiв i котушок iндуктивностi характеризується вiдносним фактором втрат. Таким фактором для конденсаторiв є тангенс кута втрат (tg), а для котушок індуктивності – добротнiсть (Q).
При введеннi таких характеристик повна провiднiсть i повний опiр визначаються виразами
![]() , (2.16)
, (2.16)
де
![]() ;
;
![]() , (2.17)
, (2.17)
де
![]() .
.
Прилад Е7-8 забезпечує можливiсть вимiрювання втрат конденсаторiв i котушок iндуктивностi як у формi тангенса кута втрат (tg), так i у формi активної провiдностi (для конденсаторiв) або опору (для котушок iндуктивностi).
Структурна схема приладу Е7-8 наведена на рис. 2.5.
В основi вимiрювання приладом лежить мостовий метод із фазочутливими детекторами зрівноважування.
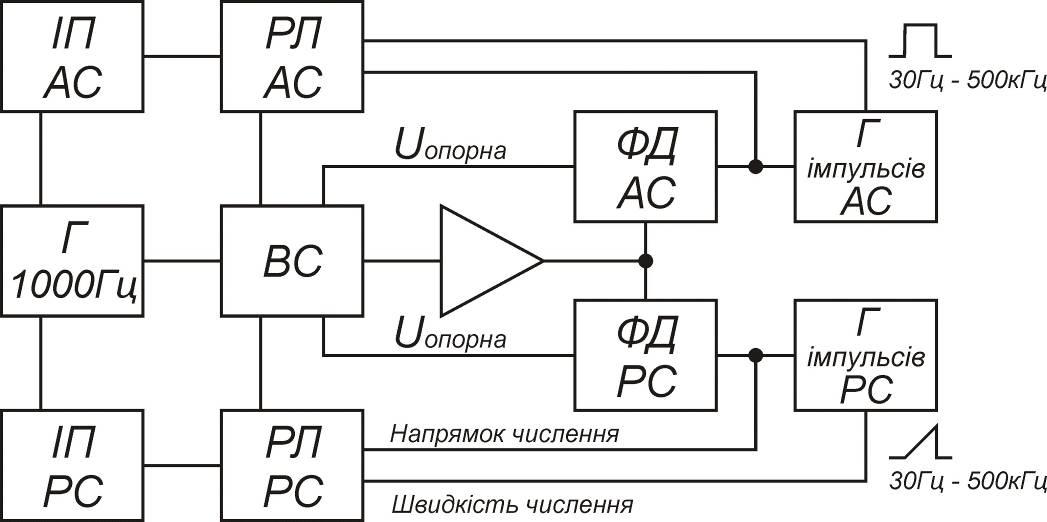
Рис.2.5. Структурна схема приладу Е7-8:
IП – iндикаторний пристрiй; ФД – фазовий детектор;
РЛ – реверсивний лiчильник; ВС – вимiрювальна схема.
Живлення моста здiйснюється вiд генератора 1000 Гц. Напруга розбалансування мостової схеми через пiдсилювач сигналу розбалансування надходить на входи фазових детекторiв активної (АС) i реактивної (РС) складових. Опорнi напруги фазових детекторiв знiмаються з мостової схеми i вибираються такими, щоб зв'язок контурiв зрівноважування був мiнiмальним. Вихiднi напруги розбалансування з фазових детекторiв подаються на реверсивнi лiчильники, якi керують станом органiв зрівноважування мостової схеми, i на генератори iмпульсiв, якi задають швидкiсть зчислення реверсивних лiчильникiв. Напрямок зчислення реверсивних лiчильникiв визначається знаком напруги розбалансування фазового детектора, швидкiсть зчислення – величиною цiєї напруги.
Чим далi мiст вiд стану рiвноваги, тобто бiльша напруга розбалансування, тим бiльша частота повторення iмпульсiв вiд генераторiв АС i РС, тим бiльша швидкiсть зчислення реверсивного лiчильника i, вiдповiдно, прискорюється процес врiвноваження моста. У мiру наближення до балансу напруга розбалансування зменшується, внаслiдок чого зменшується швидкiсть зрівноважування моста. Для запуску й зупинки системи дискретного зрівноважування є додаткова система аналогового зрівноважування (САЗ), яка плавно зрiвноважує мiст у межах ±0,6 одиницi дискретностi (на рис. 2.5 вона для спрощення залишена поза увагою). При наявностi розбалансування, бiльшого нiж 0,6 одиницi дискретностi, САЗ знаходиться в станi обмеження i вiдбувається дискретне зрівноважування моста. При досягненнi розбалансування, яке не перевищує ±0,6 одиницi дискретностi, САЗ виходить зi стану обмеження й зупиняє роботу схеми дискретного зрівноважування моста.
Вимiрювальна схема приладу являє собою чотириплечовий мiст із трансформаторами з тiсним iндуктивним зв'язком та операцiйними пiдсилювачами А1, А2, А3. Змiна схеми, яка забезпечує перехiд вiд вимiрювання об'єктiв з ємнiсним характером реактивностi до вимiрювання об'єктiв iндуктивного характеру, досягається змiною положення перемикача "С, G-L, R". Вимiрювання втрат у виглядi активної складової (G, R) або тангенса кута втрат (tg) визначається положенням перемикача "G, R-tg".
Умови балансу моста для випадку вимiрювання СX i g будуть такими:
![]() ; (2.18)
; (2.18)
![]() , (2.19)
, (2.19)
де w, m, g, l, n – кiлькiсть виткiв обмоток трансформаторiв Т2, Т1, Т5, Т4, Т3 вiдповiдно.
Для випадку вимiрювання СX i tg умова (2.18) не змiниться, а (2.19) набуде такого вигляду:
![]() . (2.20)
. (2.20)
При вимiрюваннi об'єктiв з iндуктивним характером у виглядi LX i RX умови балансу моста записуються так:
![]() ; (2.21)
; (2.21)
![]() ; (2.22)
; (2.22)
або
![]() . (2.23)
. (2.23)
Рiвностi (2.18)-(2.22) виведенi за умови, що операцiйнi пiдсилювачi мають нескiнченно великий коефiцiєнт пiдсилення, а трансформатори схеми – iдеальнi.
Окремий вiдлiк досягається завдяки зрівноважуванню моста за реактивною складовою змiною кількості виткiв n трансформатора Т3 i за активною складовою змiною кількості виткiв l трансформатора Т4.
Спрощена схема моста подана на рис. 2.6.
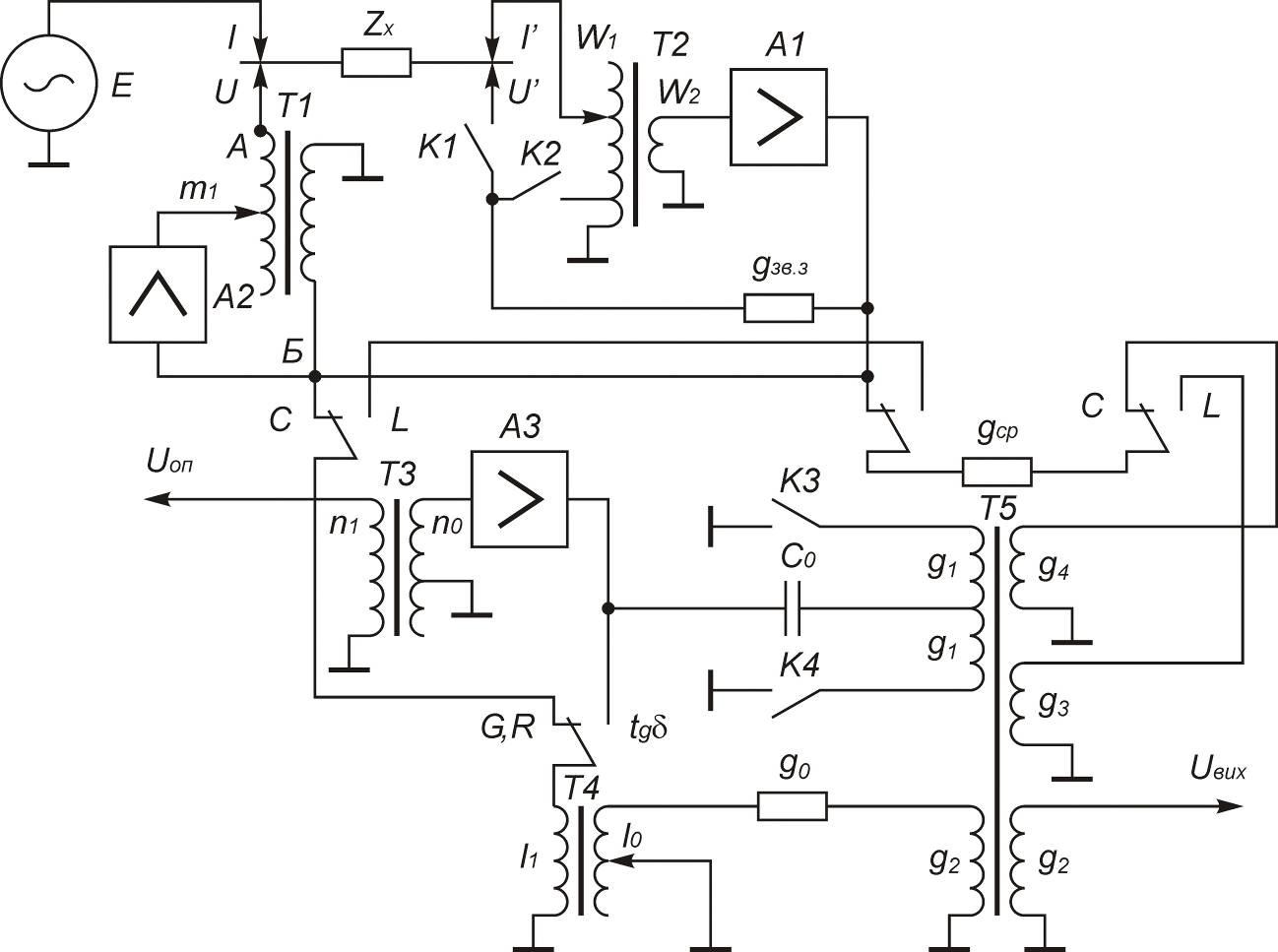
Рис. 2.6. Спрощена схема моста