

3.7 Электрооборудование
Электрооборудование машин напольного электротранспорта включает: источник энергии — аккумуляторную батарею, электродвигатели механизмов передвижения, подъема вил и управления погрузчиком, штепсельное соединение, реверсор, контроллер, систему включения и регулирования скоростей передвижения погрузчика и подъема вил, систему сигнализации и освещения.
Аккумуляторы. Для машин напольного электротранспорта применяются щелочные и свинцово-кислотные аккумуляторные батареи. К щелочным относятся железоникелевые и кадмиевоникелевые аккумуляторы. Наиболее распространенный тип щелочного аккумулятора с ламельными электродами состоит из следующих частей: положительных пластин, состоящих из плоских ламелеи или трубок с навитой спиралью перфорированной ленты, в которых активным материалом является гидрат закиси никеля; отрицательных пластин, состоящих из плоских ламелеи, в которых активным материалом являются либо окись железа (либо окись кадмия); электролита – раствора едкого калия или едкого натра в чистом виде либо с добавкой в них небольших количеств гидроокиси лития; сепараторов – дырчатых пластин из полимерных материалов, устанавливаемых между пластинами разного знака заряда для фиксирования их положения в аккумуляторе; токоведущих частей: борнов, межэлементных соединений и Других деталей крепления; стального сосуда, покрытого изнутри и снаружи слоем никеля толщиной 10-15 мм.
Свинцово-кислотные аккумуляторы состоят из следующих основных частей: положительных пластин различной конструкции, в которых активным материалом, участвующим в токообразующей реакции, является двуокись свинца; отрицательных пластин, в которых активным материалом является губчатый свинец; электролита – раствора серной кислоты плотностью от 1,25 до 1,32 г/см3; серная кислота в электролите также является активным материалом; так как она расходуется при разряде и образуется при заряде; сепараторов, предохраняющих аккумулятор от коротких замыканий между пластинами разного знака заряда; аккумуляторных сосудов из кислотоупорных материалов; токоведущих частей и деталей крепления.
Свинцово-кислотные аккумуляторы различают с поверхностными пластинами из чистого свинца (намазные) и с панцирными пластинами, состоящими из штыревой решетки, отливаемой из 7-8%-ного свинцово-сурьмянистого сплава.
Для машин напольного электротранспорта применяют электродвигатели постоянного тока. Для привода механизма передвижения используются электродвигатели последовательного возбуждения (типа ЗДТ), для гидропривода – главным образом двигатели смешанного возбуждения (типа ЗДН).
Контакторная панель представляет собой изолированное основание, на котором размещены аппараты, предназначенные для управления электродвигателями и их защити. Применяются контакторы типов УС—517В, КМВ-508В-2 и КМ-5В.
Контактор КМ-517В (рис. 23, а) имеет магнитную систему клапанного типа. На сердечнике магнитопровода 8 установлена втягивающая катушка 6. Контактное нажатие осуществляется прибирающей пружиной 5. Отключение контактора происходит под действием отключающей пружины 2. На хвостовике якоря 4 закреплена траверса с подвижными блок-контактами. Неподвижные блок-контакты 1 установлены на изоляционных колодках, закрепленных на магнито- проводе. Контактор имеет однополюсное исполнение.
Система дугогашения 9 состоит из однощелевой дугогасительной камеры и постоянного магнита, охватываемого неподвижным контактом 7. К неподвижному контакту подключается «плюс» цепи.
Контактор КМВ-508 (рис. 23, б) – прямоходовой с двумя замыкающими силовыми контактами. Контактор имеет замкнутый магнитопровод 6 с установленным на нем коническим стопом, с помощью которого достигается большее усилие тяги в начале хода якоря 5. На якоре смонтирована траверса 3, которая производит размыкание блок-контактов 9. На ней же крепится контактный мостик 2. На корпусе 4 расположены неподвижные силовые контакты 1 и подвижные и неподвижные блок-контакты 10, а также выводы втягивающей катушки 7. Отключающая пружина 8 размещена внутри магнитной системы между якорем и стопом.
Контактор КМ-5В (рис. 23, в) – прямоходовой с одним замыкающим силовым контактом. Контактор имеет замкнутый магнитопровод 5, на котором установлен плоский стоп. На якоре б смонтирован контактный мостик 3, на корпусе 1 расположены неподвижные силовые контакты 2. В магнитопровод встроена втягивающая катушка 4. Отключающая пружина 11 размещена между контактным мостиком и корпусом.

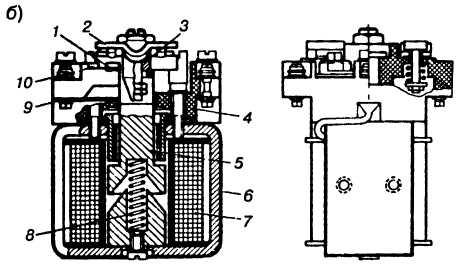
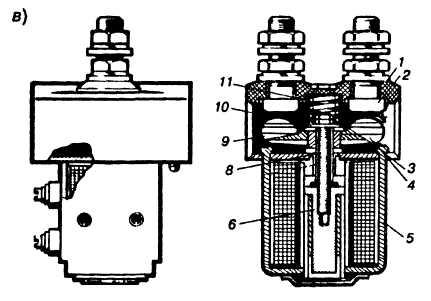
Рисунок 23 – Контакторы: а – КМ-517В; б – КМ-508; в – КМ-5В
Командоконтроллер КВ-508Т-Г (ЗКУ008-1) предназначен для управления двигателем передвижения (рис. 24, а). Он состоит из привода с валом и микровыключателей. Привод представляет собой шток 3 с упором 4, перемещающийся в направляющем основании 5. При повороте педали вал с рычагом 1 перемещается в крайнее левое положение, шток с гребенкой освобождается и начинает перемещаться в направляющей под действием двух пружин 2. При набегании выступов гребенки на ролики микровыключателей происходит переключение контакторов. Возврат в нулевое положение осуществляется возвратной пружиной 6. Командоконтроллер имеет крышку 7. Переключение командоконтроллера производится переводом его педали в соответствующее положение. Электромонтажная схема командоконтроллера изображена на рисунке 24, б.
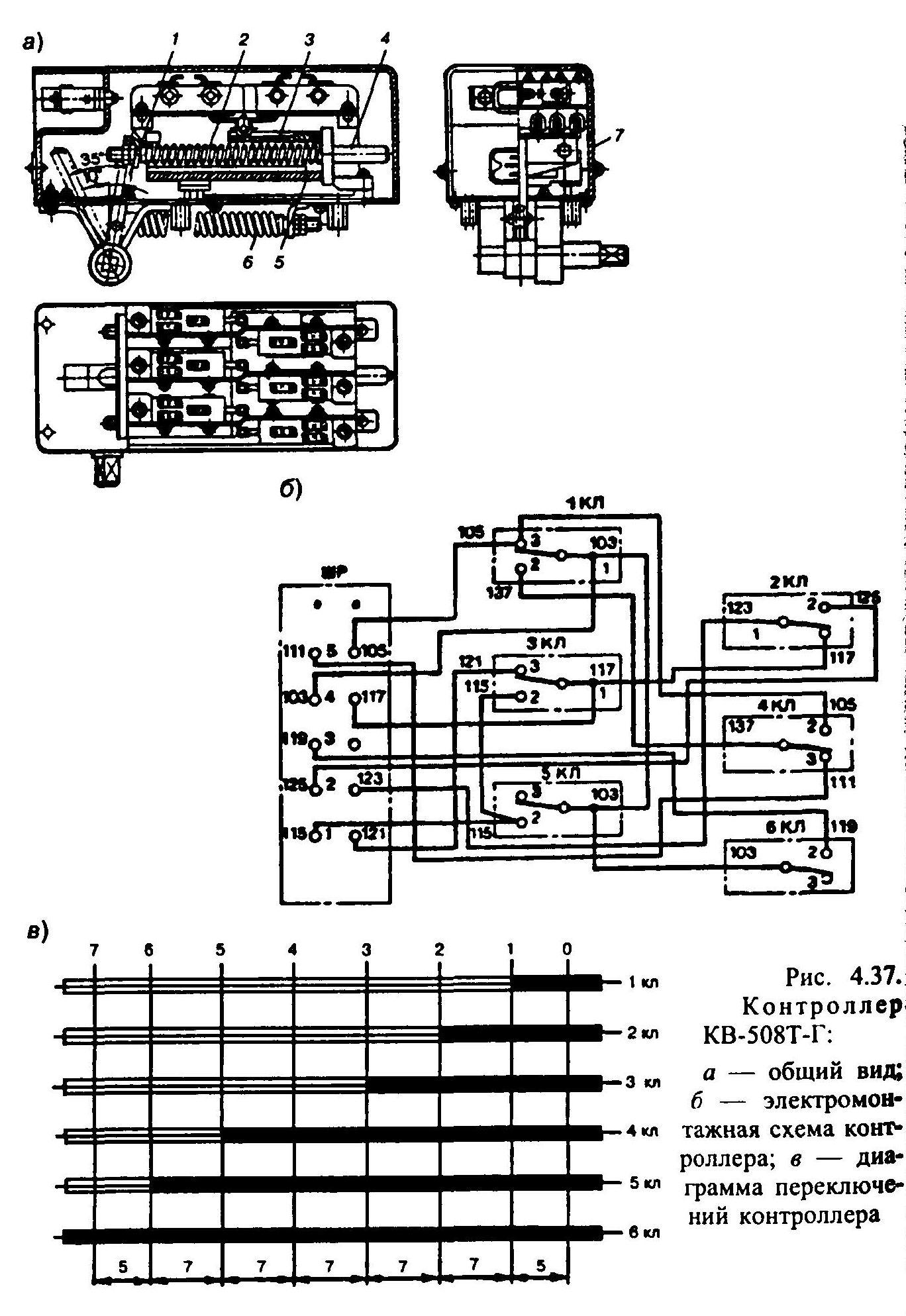
Рисунок 24 – Контроллер КВ-508Т-Г: а – общий вид; б – электромонтажная схема