

5.Импульсные схемы управления электродвигателями
5.1 В аккумуляторных автопогрузчиках
Применение электрического привода для машин напольного транспорта неуклонно расширяется, что объясняется рядом его преимуществ. Основные из них следующие: постоянная готовность к действию; возможность установки отдельного двигателя к каждому механизму машины, что значительно упрощает конструкцию и управление механизмами; высокая экономичность; легкость регулирования скорости в значительных пределах и удобство реверсирования механизмов; возможность работы со значительными кратковременными перегрузками; отсутствие выхлопных газов, безопасность работы, надежность срабатывания предохранительных устройств. Дальнейшее расширение использования электропривода для машин напольного транспорта сдерживается, однако трудностями регулирования скорости электродвигателей, связанными с повышенным расходом энергоемкости аккумуляторной батареи – источником энергии машины.
В механизмах передвижения электропогрузчика применяют электродвигатели с последовательным возбуждением, так как по условиям работы погрузчика часто требуется большой крутящий момент, иногда в несколько раз превышающий номинальный. У этих двигателей обмотки имеют малое сопротивление, и для пуска двигателя необходимо изменять напряжение на клеммах или подключать добавочное пусковое сопротивление.
Изменение напряжения на клеммах двигателя нельзя достигнуть изменением числа элементов аккумуляторной батареи, соединенных последовательно, так как это приведет к быстрой разрядке аккумуляторов и уменьшению срока службы батареи.
Пусковые сопротивления при включении расходуют энергию батареи, энергоемкость которой является важнейшим показателем временной работы машины без подзарядки. Поэтому были попытки использовать системы регулирования без пусковых сопротивлений. Такие электросхемы сложны, дороги и увеличивают размеры машин габаритов. Поэтому у большинства отечественных и зарубежных погрузчиков применяют реостатное регулирование, хотя оно неэкономично с точки зрения энергоемкости аккумуляторной бати реи. При такой схеме пуск машины производится командоконтроллером с несколькими пусковыми ступенями или угольным реостатом, что обеспечивает продолжительное изменение сопротивления и мягкое включение двигателя и всей трансмиссии.
На рисунке 28, а показано изменение силы тока при включении реостата с пятью ступенями скоростей, а на рисунке 28, б – зависимость силы потребляемого тока от скорости движения электропогрузчика при различных системах управления тяговыми электродвигателями со ступенчатым изменением скорости командоконтроллером (1), с угольным реостатом (2) и с импульсным управлением (3).
Абсциссы кривой (рис. 28, а) показывают потери мощности и момент пуска при изменении силы тока и падении напряжения па клеммах сопротивлений.
Обычно вилочные погрузчики обслуживают складские помещения, имеющие узкие проезды, что вызывает большое число маневренных операций. Время разгона двигателя в общем цикле работы
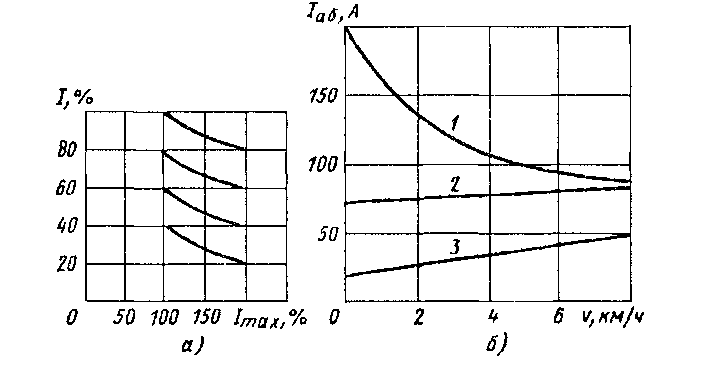
Рисунок 28 – Изменение силы тока электродвигателей механизма передвижения электропогрузчиков в режимах разгона и при движении с различными скоростями: I – ток полной нагрузки, Imax – наибольший ток, Iа, б – ток, выдаваемый аккумуляторной батареей, V – скорость движения электропогрузчика
имеет большой удельный вес; иногда погрузчики работают только в пусковых режимах (когда расстояние между местами погрузки и разгрузки не превышает нескольких метров). По графикам на рисунке 28, б можно судить о затраченной энергии аккумуляторной батареи, которая целиком относится к бесполезным потерям.
Преимущественно применяют следующие способы регулирования скорости аккумуляторных машин напольного транспорта.
1. Использование сопротивления последовательно включенного в цепь якоря двигателя; величина сопротивления меняется включением контактов, шунтирующих отдельные его участки.
2. Использование сопротивления последовательно включенного в цепь якоря двигателя и состоящего из столба угольных пластин. Величина сопротивления меняется в зависимости от силы сжатия столбца пластин ножной педалью. Для достижения максимальной скорости включается контакт, шунтирующий все сопротивления.
3. Попеременное включение и выключение линейного контакта цепи, регулирующего скорость движения либо числом включения в единицу времени, либо при одном и том же числе включений длительностью каждого включения.
Недостатки первых двух способов были рассмотрены выше. Третий способ — импульсного включения электродвигателя — имеет ряд преимуществ. Он основывается на применении полупроводников, обеспечивающих длительность включения (выключения) примерно 0,008 с.
Принцип импульсного управления рассмотрим с помощью нескольких схем.
Предположим, что цепь состоит из аккумуляторной батареи, двигателя и прерывателя (рис. 29, а). Ели замкнуть прерыватель, двигатель начнет работать, но, поскольку погрузчик неподвижен, еще не может достигнуть нужной частоты вращения. При размыкании прерывателя частота вращения двигателя снизится. Если перед его остановкой снова замкнуть прерыватель, то частота вращения будет увеличиваться, и описанное выше явление повторится. Средняя частота вращения двигателя зависит от режима его работы. Она будет увеличиваться до тех пор, пока двигатель не будет работать на полную мощность. После этого прерыватель не нужен. Иначе говоря, скорость двигателя увеличивается вместе с ростом длительности импульсов, которые поступают в электродвигатель. Это поступление импульсов приводит к скачкообразному функционированию системы. Если теперь разомкнуть прерыватель, то двигатель начнет работать как генератор и накопленными самоиндукционными обмотками энергия будет тратиться на искрообразование между клеммами прерывателя.
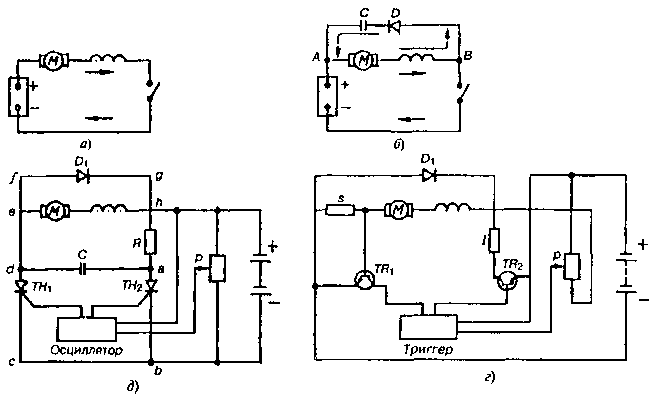
Рисунок 29 – Схемы систем импульсного регулирования
Рассмотрим схему на рисунке 29, б. Прерыватель замкнут. Ток от батареи идет от А к В через двигатель и не может пересечь диод и направлении СД. Противоток может следовать от В к А через диод в направлении ДС, и контур снова замкнется двигателем. На клеммах двигателя расположен корпус полупроводника или элементарный детектор, пропускающий ток в одном направлении и фактически противодействующий прохождению вредных токов. В нашем случае диод (или детектор) не может пропустить ток батареи, когда прерыватель закрыт, и поэтому ток проходит через двигатель. Наоборот, если прерыватель открыт, то ток самоиндукции, который выходит из двигателя в том же направлении пропускается диодом и создает замкнутый контур, изолируя батарею и включая двигатель. Последний продолжает работать в течение некоторого времени под действием этого тока даже при замкнутом прерывателе.
Неравномерность работы системы в значительной мере уменьшится или ликвидируется, если подавать очень короткие импульсы порядка 100–300 в 1 с. Кроме того, можно значительно снизить расход электроэнергии, поскольку при размыкании прерывателя электродвигатель снабжается током помимо аккумуляторной батареи.
Высокочастотные импульсы с любой частотой можно получить с помощью электронной системы управления. Ее мощность практически не зависит от габаритов. Система на отдельных участках постоянного тока прерывает его в определенном интервале времени. Регулируя продолжительность перерывов и импульсов тока, выбирают их значения, которые требуются для получения средней скорости двигателя, достигаемой при определенной последовательности импульсов. Во время этих операций противоток самоиндукции, проходя через диод, играет роль маховика поршневого двигателя, хотя для осуществления этих действий требуются доли секунды.
Существует два метода создания электронных (импульсных) схем управления. Первый метод заключается в использовании кремниевых выпрямителей – так называемых контролирующих диодов; третий диод в соответствии с потенциалом, которым он заряжен, открывает или закрывает путь главному току в элементе выпрямления. Такой процесс применяется в трехэлектродной лампе, в которой роль вспомогательного электрода играет сетка. Но в отличие от ламп контролирующие диоды объемом в несколько кубических сантиметров позволяют подавать ток силой 100 А и выше.
Обратимся к схеме на рисунке 29, в. Двигатель М не питается от батареи, потому что контролирующий диод (тиристор ТНХ) не включен. Если тиристор возбудить, то ток проходит через двигатель и сообщает ему некоторую скорость под действием электроэнергии батареи. В то же время через сопротивление R от двигателя циркулирует ток, который заряжает конденсатор С. Если в конце данного времени t включить тиристор ТН2, конденсатор начнет разряжаться через контур abcd, а через тиристор ТН1 пойдет обратный ток. Результирующий ток может достигнуть небольшой величины, но если она меньше величины тока, проходящего через тиристор ТН1, то результирующий ток затухает. Двигатель отделен от батареи, но продолжает работать от своего самоиндукционного тока, который циркулирует по контуру efgh через диод D1 . Это происходит во время t2 отсечки тиристора ТН1, который по истечении этого времени посылает новый импульс, и цикл снова повторяется.
Из изложенного можно сделать вывод, что если увеличить продолжительность импульсов, т.е. время t1, то электродвигатель будет постепенно увеличивать частоту вращения. Пуск двигателя будет закончен, когда продолжительность работы тиристора ТН1 достигнет 100%.
Система управления электродвигателем включает потенциометр Р и генератор. Потенциометр действует от педали и устанавливает переменное напряжение, изменяющееся пропорционально скорости движения погрузчика. Генератор или электронная группа создает и усиливает под действием высокого переменного напряжения тока, необходимые для возбуждения командных электродов – тиристоров ТН1 и ТН2
Схема позволяет автоматически ограничивать силу тока до величины, допустимой для тиристоров, ограничивать время действия потенциометра, уменьшающего напряжение батареи, что дает возможность при малом расходе электроэнергии осуществлять мягкий и сравнительно длительный пуск без толчков. Хорошо отрегулированная система электронного пуска позволяет трогаться погрузчику с места и перемещаться со скоростью от нулевой до номинальной и течении требуемого времени.
Как только фаза электронного пуска закончится, произойдет автоматическое замыкание цепи, и двигатель получит питание от аккумуляторной батареи, минуя тиристоры.
Сущность второго метода создания электронных схем управления рассмотрим на схеме, показанной на рисунке 29, г. В схеме предусмотрено использование транзисторов, аналогичных употребляемым н радиотехнике, но больших габаритов. Сравнение рассмотренной схемы с предыдущей показывает их схожесть.
Потенциометр Р снижает напряжение передатчика (триггера), который имеет транзистор TR1, включающий электродвигатель н течении времени t1 так же как и в предыдущей схеме. Самоиндукционный ток электродвигателя, ограничивая напряжение потенциометра, блокирует триггер и транзистор TR1 к моменту истечения времени t1. Во время t2 сила тока самоиндукции при проходе его через дроссельную катушку S и диод D1 увеличивается. Транзистор TR2 включая напряжение от зажимов шунта, в случае необходимости ограничивает силу тока транзистора TR1.
Применяемые транзисторы (диаметром до 20-30 мм) пропускают ток величиной порядка 25 А . Схемой предусмотрена параллельная установка транзисторов, что влечет неравномерное распределение протекающего через них тока. Это основной недостаток транзисторных схем.
Тиристорная схема имеет тот недостаток, что падение напряжения на кремниевых тиристорах велико, а это уменьшает ее КПД. Кроме того, такие тиристоры недостаточно стойки и требуют интенсивной вентиляции для охлаждения. Германиевые тиристоры лишены этого недостатка и могут работать в более тяжелых условиях.
Обе рассмотренные системы имеют примерно одинаковые преимущества перед старыми схемами управления. На рисунке 30 представлен график изменения силы тока в электродвигателе: сначала она возрастает во время фазы t1, а затем убывает во время фазы t2, когда ток проходит через диод. Батарея подает ток только во время фазы t1.
Система работает подобно трансформатору: батарея подает ток относительно небольшой величины при нормальном напряжении, электродвигатель же получает ток большой силы при слабом напряжении, которое не изменяется в течении всего времени пуска.
Соотношение между средними величинами тока, подаваемого батареей, и тока, проходящего в электродвигателе, может достигать 1/5. Соотношение меняется в зависимости от выполняемой части рабочего цикла погрузчика и составляет (в амперах) при пуске (включении) 12/55, разгоне 50/200, движении 80/260, торможении двигателя 95/285.

Рисунок 30 – Схема подачи импульсов
Импульсная система управления при работе электропогрузчика действует только в неустановившихся фазах его движения, поэтому основная экономия электроэнергии аккумуляторной батареи достигается при работе машины на коротких плечах и при частом маневрировании. Общая экономия может достигать 28/60% энергоемкости батареи; чем больше в рабочем цикле погрузчика доля неустановившегося движения, тем больше экономия. Наибольшее применение в промышленности получили тиристоры типа SCR, отличающиеся устойчивыми характеристиками и повышенной надежностью в работе.
Три принципиальные разновидности электросхем импульсного управления тяговыми двигателями механизма передвижения погрузчика показаны на рисунке 31.
Преимущества электронного управления погрузчиками возрастают, если применяются печатные схемы. Эти схемы достаточно точны и устойчивы в работе, не требуют проверки и тщательного ухода. Применение электронной системы управления погрузчиком позволяет выполнять больший объем перегрузочных работ, компенсируя тем самым более высокую ее стоимость в сравнении со стоимостью обычно применяемых систем управления. Регулирование скорости импульсами, выполняемое электронной схемой, – важное техническое достижение, которое расширяет область применения машин напольного транспорта.
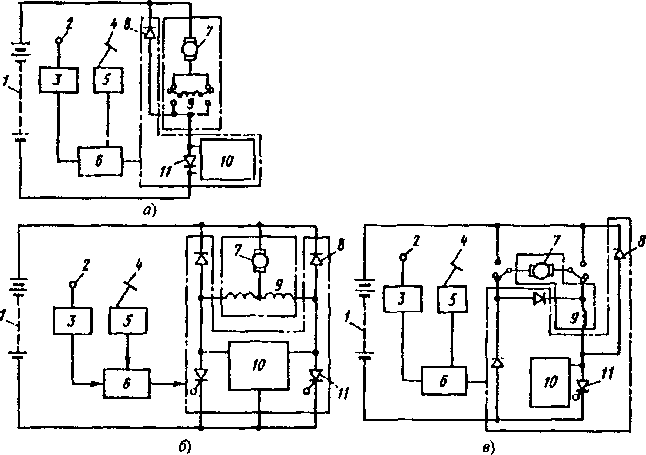
Рисунок 31 – Схемы управления двигателем: а — с механическими прерывателями направления тока; б — бесконтактного переключения направления тока; в — с рекуперацией электроэнергии в аккумуляторную батарею при торможении автопогрузчика: 1 – батарея; 2 – реверс; 3 – переключатель; 4 – педаль командоконтроллера; 5 – командоконтроллер; 6 – генератор импульсов; 7 – тяговый электродвигатель; 8 – диоды; 9 – обмотки возбуждения; 10 – коммутационная цепь; 11 – тиристоры
Изменение интервала, т.е. частоты импульсов, подаваемых к электродвигателю, производится потенциометром несложной конструкции, устанавливаемым на педали. Ход педали двухступенчатый; скорость погрузчика на первой ступени возрастает до 25%, на второй — 100%. Это улучшает управление машиной при низких скоростях. Система импульсного регулирования работает при скоростях погрузчика до 80% от полной, после чего контактор замыкает, отключает систему и к двигателю подается полный ток от батареи. Такая конструкция обеспечивает максимальные скорости погрузчика и КПД системы.
Электропгрузчики имеют предохранительные и блокирующие устройства, которые предохраняют электрическую цепь от повреждений при возможных неисправностях электронного устройства или грубых нарушениях правил эксплуатации. Применяются следующие виды предохранительных устройств:
–контур безопасного отказа. Если основной источник импульсов не включается, то размыкается главный контактор переднего или заднего хода;
– контрольный контур безопасного отказа. Если контур безопасного отказа не действует, главные контакторы не замкнутся;
– блокировка ускорителя. Если ускоритель вводится в действие прежде переключателя направления движения, то контакторы не замкнутся;
– блокировка переключателя направления. Если переключатель направления реверсируется при нажатой педали ускорения, то контакторы автоматически разомкнутся;
– блокировка короткозамыкающего контактора. Если двигатель перестает пульсировать, то короткозамыкающий контактор не сможет замкнуться;
– блокировка тормоза (по специальному заказу). Если тормоз вводится в действие при нажатой педали ускорения, то подача энергии к двигателю прекращается, но главные контакторы остаются включенными. Если тормоз приводится в действие, когда короткозамыкающий контактор включен, то он автоматически отключается.
В сети предусматривается установка плавкого предохранителя для защиты тиристора в случае короткого замыкания цепи или перегрузки.
Осуществление «ползучего» хода при импульсном регулировании позволяет погрузчикам с высокой точностью маневрировать в сложных условиях. Помимо этого, появилась возможность увеличить высоту штабелирования грузов до 15 м. Повысилась производительность труда водителя ввиду облегчения управления погрузчиком, безопасность выполнения погрузочных и транспортных работ вследствие плавного наращивания скорости машины.
Применение импульсного регулирования позволяет упростить уход и техническое обслуживание электрооборудования. Текущий ремонт может выполняться специалистами невысокой квалификации, поскольку электронное устройство состоит из ряда релейных устройств и печатных контуров, соединенных штепсельными разъемами. Их легко снимать и заменять. Обслуживающий персонал снабжается руководством по эксплуатации, облегчающим обнаружение и устранение неисправностей.
Импульсное регулирование увеличивает срок службы трансмиссии и тормозной системы погрузчика, так как при работе не требуются частые повторные торможения как при других видах регулирования.