

5.2 Смешанные виды привода в автопогрузчиках
При использовании двигателей внутреннего сгорания для компенсации характерных для них недостатков (отсутствие перегрузочной способности и малые пределы регулирования) преимущественно применяются смешанные (комбинированные) виды привода: с механическими, гидравлическими, гидростатическими и электрическими передачами. Смешанные виды приводов широко используются в МНБТ. Удельный вес распространенности передач зависит от грузоподъемности и с ее увеличением доля механических передач уменьшается. В среднем машины с механическими передачами составляют около 15%, с бесступенчатыми гидродинамическими и гидростатическими – 83%, электрические и другие разновидности комбинированных передач до 2%, хотя на машинах большой грузоподъемности их доля достигает 15–20%.
На рисунке 32 показано устройство механизма передвижения погрузчика с гидравлической передачей. Первичный вал гидротрансформатора 4 непосредственно связан с двигателем внутреннего сгорания 6, от этого вала через коробку отбора мощности приводится в движение гидронасос 5. Гидротрансформатор состоит из реактора 8, турбинного колеса 9, насосного колеса 10. Для повышения коэффициента полезного действия при работе на максимальных скоростях гидротрансформатор имеет муфту свободного хода 7, она переключает реактор, когда входящий и выходящий моменты на валах гидротрансформатора выравниваются. Насосное колесо подает рабочую жидкость на лопасти турбинного колеса и вращает его. Закрепленный на муфте свободного хода реактор дополнительно изменяет направление потока жидкости и увеличивает крутящей момент, поэтому выходной момент может быть больше входного.
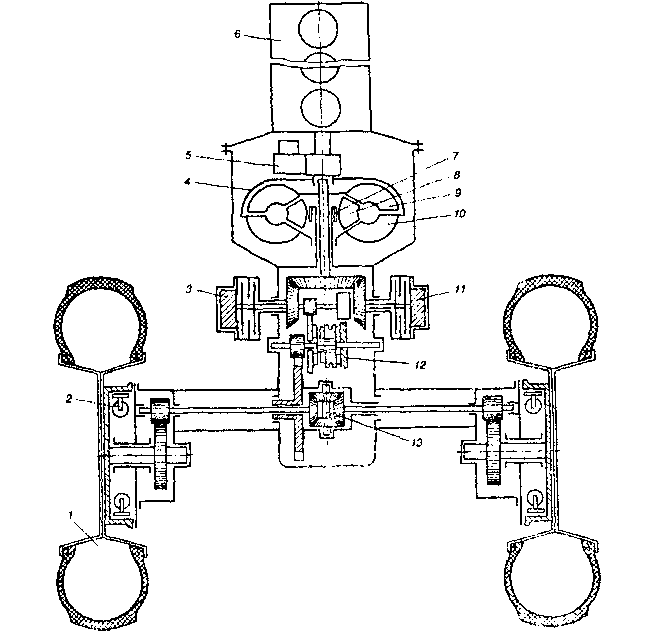
Рисунок 32 – Гидродинамическая передача погрузчика с колесными редукторами
Для одноступенчатого гидротрансформатора характерны величины коэффициента трансформации 2–3,5, кроме того, использование гидротрансформатора при высоких значениях коэффициента трансформации уменьшает КПД. Для исключения неэкономичных режимов и увеличения общего передаточного отношения гидротрансформатор обычно работает последовательно с одной, двумя, а иногда и с тремя понижающими передачами. Для этих целей механизм передвижения снабжается коробкой передач с синхронизатором включения 12, дифференциальной передачей 13 и колесными редукторами, сцеплением переднего хода 3 и заднего хода 11, торможение ходовых приводных колес 1 выполняется гидравлическими сервотормозами 2.
Схема гидростатического привода дана на рисунке 33. Двигатель внутреннего сгорания 3 вращает гидронасосы 1 и 2 постоянной производительности, питающие рабочей жидкостью механизмы подъема, навесное оборудование и гидропривод усилителя рулевого управления, а также гидронасос 9 регулируемой производительности, питающий два параллельно присоединенных гидродвигателя 4, которые приводят ведущие колеса 8 через колесные редукторы 7. Колеса или редукторы оборудуются дисковыми или колодочными тормозами 5. Подвод рабочей жидкости к мотор-колесам, объединяющим приводные гидродвигатели, редукторы, ведущие колеса, тормоза, происходит через жесткие и гибкие трубопроводы 6.
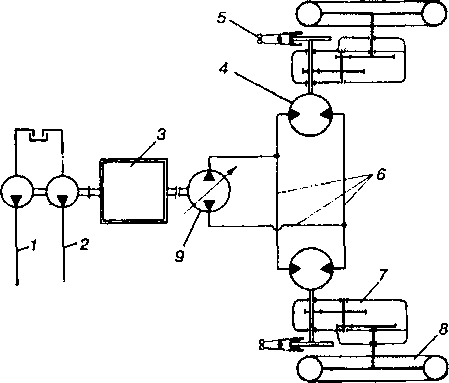
Рисунок 33 – Гидростатический привод вилочного погрузчика с колесными редукторами
В качестве регулируемого насоса преимущественно применяются аксиально-поршневые гидронасосы с наклонной шайбой. Гидродвигатели могут быть аксиально-поршневого или любого другого типа с нерегулируемым рабочим объемом. Во время стоянки регулируемый гидронасос занимает нейтральное положение, при этом поршни не двигаются и рабочая жидкость не подается. Вывод гидронасоса из нейтрального положения и подача рабочей жидкости зависят от положения наклонной шайбы, перемещаемой гидроцилиндром по команде с пульта управления.
На рисунке 34 представлена блок-схема регулируемого дизель-электрического привода с электронной системой управления, дизельный двигатель 14 вращает генератор постоянного тока 15, питающий исполнительные электромоторы постоянного тока с параллельным возбуждением рабочих механизмов 18, управление полем электромотора и частотой вращения осуществляется устройством 17 и транзисторной системой 19.
В соответствии с требованиями графика нагрузки исполнительного механизма параллельное поле электромотора регулируется в зависимости от силы тока транзисторной системой управления.
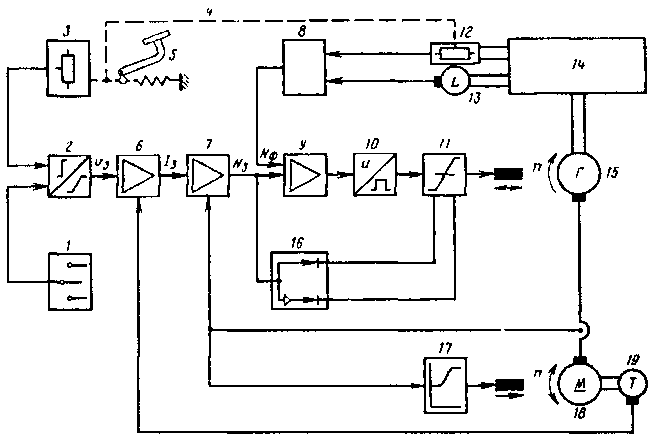
Рисунок 34 – Схема дизель-электрического привода с электронной системой управления
Этим создается возможность лучшего согласования оборотов электромотора, скорости движения исполнительного механизма, а также возможность использования требуемого диапазона мощности. Управление движением в прямом и обратном направлениях выполняется переключателем 1. Для согласования режимов работы дизеля и генератора блок-схемой предусмотрены системы контроля и обратной связи. Педаль движения 5 связана с датчиком скорости 3, устанавливающим через интегратор 2 заданное значение скорости движения. От генератора 2 сигналы поступают к регулятору скорости 6, регулятору тока 7 и мощности 9. Регулятор мощности 9 связан с датчиками исполнительных механизмов 10, переключателем полярности 16, управляющим конечной ступенью 11, генератора 15.
В регуляторе скорости 6 происходит сравнение заданного значения скорости с фактическим, поступающим от тахогенератора 8. Подача топлива к дизельному двигателю регулируется сравнивателем частоты вращения 4 и потенциометром топливного насоса 12. Тахогенератор 8 получает сигналы от потенциометра топливного насоса 12 и генератора освещения 13. Отклонения в скорости исполнительных механизмов компенсируется полем возбуждения генератора через исполнительный орган и конечную ступень. Чтобы предотвратить электрическую или механическую перегрузку системы используются регуляторы тока.
Системы регулирования скорости и силы тока контролируются регулятором мощности, этим предотвращается перегрузка и глушение дизельного двигателя. Системой предусмотрено сравнение скоростей генератора-освещения 13 и заданной дизельного двигателя 14, зависящей от положения рычажного механизма топливного насоса. Если разница в оборотах получается от уменьшения частоты вращения дизеля вследствие перегрузки, то регулятор мощности снижает мощность силового генератора 15. Такая регулировка поля возбуждения генератора происходит при движении и при торможении, что дает возможность рекупирировать энергию и повысить экономичность привода.
Описанная блок-схема дизель-электрического привода машин в сравнении с традиционными обладает следующими преимуществами: скорость движения может регулироваться педалью независимо от сопротивления (в пределах диапазона скоростей), торможение погрузчика до полной остановки и удержание его при работающем двигателе производится без трения (отсутствует сцепление), лучше используется мощность дизеля во всем диапазоне благодаря электронной системе регулирования (оптимальное согласование), привод рабочей гидравлики других механизмов управляется независимо от скорости движения, максимальное ускорение и замедление регулируются переключателем и соответствуют командам педали движения, весь привод имеет эластичную подвеску и не передает вибрации на раму машины.
Недостатки привода: электрические моторы имеют меньшую удельную мощность, больше по размерам и весу, чем гидравлические двигатели, электромоторы требуют хорошей вентиляции для охлаждения.