

42. Метод вращений решения полной проблемы собственных значений.
Метод
вращений предназначен для решения
полной проблемы собственных значений
для эрмитовых матриц. В алгебре
доказывается, что для эрмитовой матрицы
 существует унитарная матрица
существует унитарная матрица ,
такая, что преобразование подобия с ней
приводит матрицу
,
такая, что преобразование подобия с ней
приводит матрицу к диагональной матрице
к диагональной матрице :
: (1)
(1)
Для
унитарной матрицы по определению
сопряженная матрица равна обратной:
 .
Таким образом, равенство (1) можно
переписать в виде
.
Таким образом, равенство (1) можно
переписать в виде (2)
(2)
Собственными
значениями диагональной матрицы
 являются ее диагональные элементы
являются ее диагональные элементы ,
а собственными векторами - соответствующие
единичные (координатные) векторы
,
а собственными векторами - соответствующие
единичные (координатные) векторы ,
где
,
где - символ Кронекера. Выполнение равенств
- символ Кронекера. Выполнение равенств в данном случае очевидно.
в данном случае очевидно.
Строки
унитарной матрицы
 являются собственными векторами матрицы
являются собственными векторами матрицы .
Это следует из(2):
.
Это следует из(2):
 .
Действительно, отсюда имеем
.
Действительно, отсюда имеем или
или или
или ,
где
,
где .
.
Вещественные симметрические матрицы являются частным случаем эрмитовых матриц. Рассмотрим метод вращений для вещественных симметрических матриц.
Найдем
наибольший по модулю внедиагональный
элемент вещественной симметрической
матрицы
 .
Пусть таковым оказался элемент
.
Пусть таковым оказался элемент .Без
ограничения общности можно считать
.Без
ограничения общности можно считать .
.
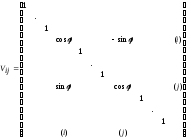
Введем в рассмотрение матрицу вращения
Умножим
матрицу
 справа на матрицу
справа на матрицу .
Получим матрицу
.
Получим матрицу ,
которая отличается от матрицы
,
которая отличается от матрицы только столбцамиi
и j:
только столбцамиi
и j:
 (3),
(3),
 (4)
(4)
Из (3) и (4) при этом следует, что сумма квадратов элементов этих столбцов остается без изменения:
 (5)
(5)
Умножим
матрицу
 слева на матрицу
слева на матрицу .
Получим матрицу
.
Получим матрицу ,
которая отличается от матрицы
,
которая отличается от матрицы только строкамиi
и j:
только строкамиi
и j:
 (6),
(6),
 (7)
(7)
Из (6) и (7) при этом следует, что сумма квадратов элементов этих строк остается без изменения:
 (8)
(8)
Таким образом, преобразование подобия
 (9)
не меняет суммы квадратов элементов
матрицы:
(9)
не меняет суммы квадратов элементов
матрицы: 
Преобразование
подобия (9) также сохраняет симметричность
матрицы:
 .
.
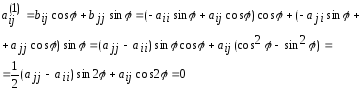
Теперь
начинается самое главное. Преобразование
подобия (9) меняет только два диагональных
элемента. При этом, из симметрии , формул
(8) и (5) следует:
 Это
значит, что при
Это
значит, что при преобразование (9) увеличит сумму
квадратов диагональных элементов и
соответственно уменьшит сумму квадратов
внедиагональных элементов матрицы на
величину
преобразование (9) увеличит сумму
квадратов диагональных элементов и
соответственно уменьшит сумму квадратов
внедиагональных элементов матрицы на
величину .
Из (6) и (4) получаем уравнение для
определения соответствующего угла
.
Из (6) и (4) получаем уравнение для
определения соответствующего угла
Отсюда
находим искомый угол поворота
 ,
, (10)
(10)
Мы
рассмотрели идею метода вращений и
получили расчетные формулы метода. В
методе вращений строится последовательность
матриц
 (11)
(11)
по
правилу
 (12)
(12)
Построение
последовательности (11) заканчивается
получением матрицы
 ,
недиагональные элементы которой можно
считать равными нулю в пределах заданной
точности. При этом ее диагональные
элементы принимаются за собственные
значения.
,
недиагональные элементы которой можно
считать равными нулю в пределах заданной
точности. При этом ее диагональные
элементы принимаются за собственные
значения.
В
качестве собственных векторов можно
взять соответствующие строки матрицы
 .
Может оказаться, что собственные векторы
проще находить непосредственно решением
систем
.
Может оказаться, что собственные векторы
проще находить непосредственно решением
систем .
.
Теорема. Матричная последовательность (11) в методе вращений сходится к диагональной матрице со скоростью геометрической погрешности.
Доказательство.
Обозначим
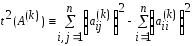 .
Имеем
.
Имеем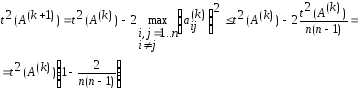 .
Следовательно, сумма квадратов
недиагональных элементов в матричной
последовательности (11) сходится к нулю
не хуже, чем геометрическая последовательность
со знаменателем
.
Следовательно, сумма квадратов
недиагональных элементов в матричной
последовательности (11) сходится к нулю
не хуже, чем геометрическая последовательность
со знаменателем .
Теорема доказана.
.
Теорема доказана.