

3. Вибір періодичності опитування датчиків
2.3.1. Загальна характеристика задачі
Задачу вибору періоду опитування датчиків То розв’язують з ураху-ванням двох суперечливих міркувань. Збільшення То, з одного боку зни-жує завантаження процесора задачами ПОІ, а з другого боку, зростає по-хибка визначення x^(t) або y^(t) у моменти часу kTо > t > (k–1)Tо. Здава-лося б, цю проблему легко можно вирішити вибираючи То за допомогою теореми Котельнікова–Шеннона , але її використання наштовхується на ряд принципових ускладнень.
Реальні неперервні сигнали є кінцевими за часом, отже їх спектри не обмежені, тому wЗ не можна визначити, а треба вибирати. Вибір wЗ за цих умов призводить до втрати високочастотних складових спектра і, от-же, до похибки. Однак, якщо допустити обмеження з точності відтворе-ння y^(t), то наближене подання безперервного повідомлення у вигляді дискретної послідовності величин можливе. При цьому для підвищення точності відновлення використовують різні методи екстра- та інтерпо-ляції.
Методи екстраполяції використовують в оперативному керуванні ви-обництвом, коли необхідно визначити майбутні значення критерію керу-вання, тобто з деяким випередженням. Методи інтерполяції застосову-ють для відновлення значень параметра у моменти часу, що передують останній точці замірювання.
Як критерій найліпшого наближення поновлюваної оцінки z^ до його дійсного значення z застосовують одне з двох значень дисперсії похибки:
при керуванні технологічним процесом – максимальне можливе в ін-тервалі інтерполяції Dz.max;
при визначенні середніх величин – усереднене на інтервалі інтер-поляції Dz.сер.
При цьому існують два методи вибору То: перший – точний, за авто-кореляційною функцією; другий – наближений, за реалізацією випадко-вого процесу.
2.3.2. Вибір періодичності опитування датчиків за автокореляційною функцією
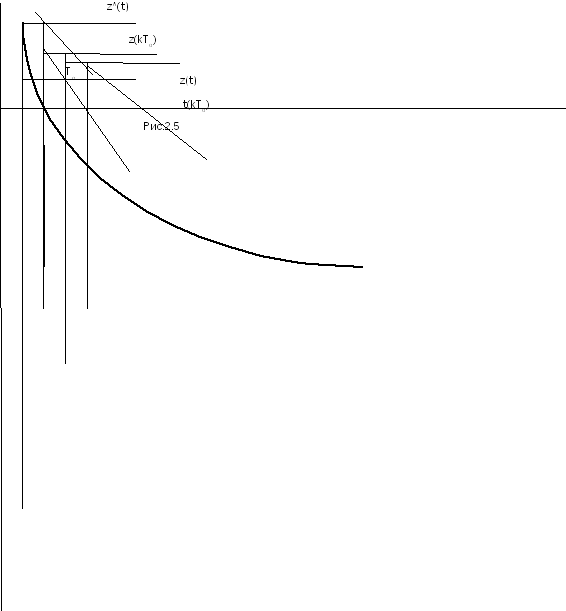
Для розв’язання цієї задачі необхідно попередньо вибрати метод на-ближення відновленої функції z^(t) до дійсної z(t) за дискретними значе-ннями замірів z(kTо). Найпростішим серед цих методів є метод східчас-тої екстраполяції, за яким
z^(t) = z(kTо) при (k+1)Tо > t ³ kТо ,
z^(t) = 0 при kТо > t ³ (k+1)Tо . (2.8)
Графічна реалізація співвідношення (2.8) подана на рис. 2.5. Цей метод не потребує обчислень і тому широко використовується в мікро-процесорних контролерах (МПК), але він дає найбільшу похибку порів-няно зі складнішими методами, що потребують обчислень.
z
Дисперсія похибки такої екстраполяції
D z..e = M {z[(k+1)Tо] - z(kTо)}2, (2.9) а для стаціонарних випадкових процесів:
M{z[(k+1)Tо]} = M[z(kTо)] = Rz(0) + mz 2,
M{z[(k+1)Tо] × z(kTо)} = Rz(Тo) + mz2. (2.10)
Підставивши (2.10) в (2.9), отримаємо вираз для дисперсії похибки східастої екстраполяції:
Dz.e = 2 [Rz(0) – Rz(Tо)], (2.11)
де Rz(0), Rz(Tо) – значення автокореляційної функції відповідно при таких значеннях аргумента: Dt = 0 і Dt = Tо.
Якщо не вдається вибрати То, що забезпечує необхідну точність, то вибирають більш точний метод поновлення z^(t). До таких належить, на-самперед, метод лінійної інтерполяції, при застосуванні якого дисперсія похибки інтерполяції зменшується у 3 рази порівняно до методу східчас-тої екстраполяції, а необхідна пам’ять збільшується у 2 рази:
Dz.e = 2 [Rz(0) – Rz(Tо)] /3. (2.12) Якщо лінійна інтерполяція проводиться за двома точками, то при парабо-лічній екстраполяції використовуються вже три точки, але суттєвого зменшення дисперсії цей метод не дає, тому поширення він не отримав.
Після проведення операцій фільтрації та аналітичного градуювання датчиків і отримання оцінки x^(t) максимально можливе значення диспе-рсії похибки ІВК буде визначатися двома складовими: дисперсією екст-раполяції Dx.e і дисперсією погрішності засобів вимірювання Dx.вим:
Dx.max = Dx.e + Dx.вим . (2.13)
Формула (2.13) справедлива в тому разі, коли похибка засобів ви-мірювання не залежить від значень вимірюваних величин, а системати-чна складова похибки вимірювання дорівнює 0. У разі використання схід-частої екстраполяції формула (2.13) має такий вигляд:
Dx.max = 2 [Rz(0) – Rz(Tо)] + D x.вим . (2.14)
Усереднена на інтервалі інтерполяції дисперсія похибки має такий
вигляд: То
Dx.max = 2 [Rх(0) – ò Rх(Dt) d(Dt)/То] + D x.вим. (2.15)
0
Вираз (2.14) можна використати для розв’язання таких задач:
прямої – визначення максимально можливої похибки ІВК при зада-ному значенні То (застосовують для ІВК МПК),
оберненої – визначення То, за якого максимально можлива похибка ІВК не перевищує заданого значення (застосовують для ІВК ЕОМ).
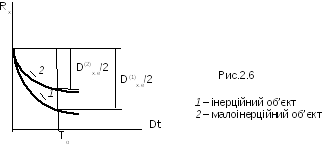
Використаємо вираз (2.14) для аналізу факторів, що впливають на дисперсію екстраполяції. Як видно з цього виразу, Dx.e залежить від двох факторів: То і інтенсивності спаду автокореляційної функції Rх(Dt) (рис. 2.6). Як видно з рис. 2.6, при одному й тому самому То дисперсія екстра-поляції менша у більш інерційному процесі. Водночас для отримання од-накової дисперсії екстраполяції у менш інерційному процесі треба ви-би рати менше То.. З розглянутого можно зробити висновок, що бажано при підмиканні ІВК до ЕОМ розподіляти датчики на кілька груп з бли-зькими діапазонами розрахункових То.
Вибір періоду опитування датчиків за реалізацією
випадкового процесу
Для розрахунку То за допомогою співвідношення (2.14) необхідно мати автокореляційну функцію, одержання якої потребує досить знач-них додаткових обчислень. Крім того, іноді без розрахунку похибки конт-рольованої величини задаються тільки її відносним збільшенням за раху-нок квантування сигналу за часом або відносним збільшенням дисперсії Dx.e/Dx, де Dx – загальна дисперсія величини, що вимірюється, Dx = Dx.об + + Dx.вим, причому Dx.об – це дисперсія контрольованої величини x, яка ви-никла за рахунок випадкових процесів безпосередньо в самому об’єкті. Для визначення То у цьому випадку використовують таке співвідноше-ння:
4DtспDx.e/Dx³То, (2.16) де Dtсп – час спаду автокореляційної функції, тобто час, за який автоко-реляційна функція досягне значень 0,05Rx(0) ³ Rx(Dtсп) . Як видно з ви-разу (2.16), для розрахунку періодичності опитування датчиків у цьому разі достатньо знати тільки Dtсп, не знаючи всієї залежності R(Dt).
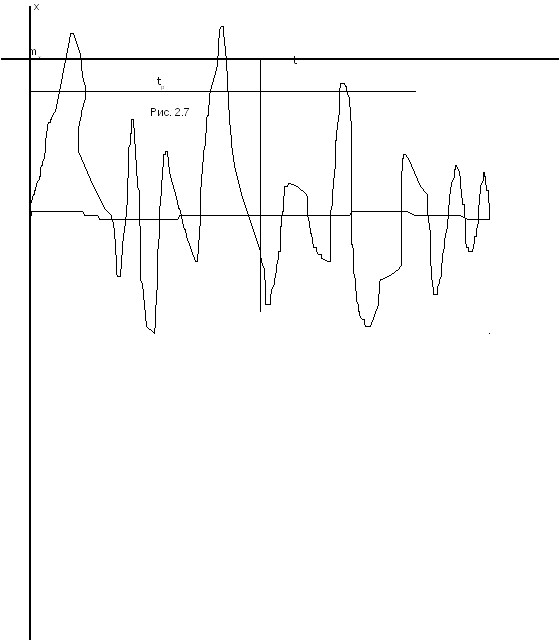
Мінімальне значення Dtсп визначається за реалізацією випадкового процесу (рис. 2.7) за такою формулою:
(Dtсп) min = 1/ no = tp/ No , (2.17)
де mx – математичне сподівання випадкового процесу x(t); tp – трива-лість реалізації випадкового процесу, яка вибирається такою, щоб No³100; де No – кількість перетинів випадковим процесом лінії марема-тичного споді-вання на часовому інтервалі tp.
З допомогою формули (2.16) також можна розв’язати як пряму, так і обернену задачі.